Detailed Description
Back to list of all libraries | See all modules
Library mrpt-topography
Conversion and useful data structures to handle topographic data, perform geoid transformations, geocentric coordinates, etc...
See mrpt::topography
Classes | |
| struct | mrpt::topography::TCoords |
| A coordinate that is stored as a simple "decimal" angle in degrees, but can be retrieved/set in the form of DEGREES + arc-MINUTES + arc-SECONDS. More... | |
| struct | mrpt::topography::TEllipsoid |
| struct | mrpt::topography::TGeodeticCoords |
| A set of geodetic coordinates: latitude, longitude and height, defined over a given geoid (typically, WGS84) More... | |
| struct | mrpt::topography::TDatum7Params |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatum7Params_TOPCON |
| struct | mrpt::topography::TDatum10Params |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatumHelmert2D |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatumHelmert2D_TOPCON |
| struct | mrpt::topography::TDatumHelmert3D |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatumHelmert3D_TOPCON |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatum1DTransf |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TDatumTransfInterpolation |
| Parameters for a topographic transfomation. More... | |
| struct | mrpt::topography::TPathFromRTKInfo |
| Used to return optional information from mrpt::topography::path_from_rtk_gps. More... | |
Functions | |
| void | mrpt::topography::path_from_rtk_gps (mrpt::poses::CPose3DInterpolator &robot_path, const mrpt::obs::CRawlog &rawlog, size_t rawlog_first, size_t rawlog_last, bool isGUI=false, bool disableGPSInterp=false, int path_smooth_filter_size=2, TPathFromRTKInfo *outInfo=nullptr) |
| Reconstruct the path of a vehicle equipped with 3 RTK GPSs. More... | |
Data structures | |
| typedef mrpt::math::TPoint3D | mrpt::topography::TUTMCoords |
| typedef mrpt::math::TPoint3D | mrpt::topography::TGeocentricCoords |
| bool | mrpt::topography::operator== (const TCoords &a, const TCoords &o) |
| bool | mrpt::topography::operator!= (const TCoords &a, const TCoords &o) |
| std::ostream & | mrpt::topography::operator<< (std::ostream &out, const TCoords &o) |
| bool | mrpt::topography::operator== (const TGeodeticCoords &a, const TGeodeticCoords &o) |
| bool | mrpt::topography::operator!= (const TGeodeticCoords &a, const TGeodeticCoords &o) |
Topography coordinate conversion functions | |
| void | mrpt::topography::geodeticToENU_WGS84 (const TGeodeticCoords &in_coords, mrpt::math::TPoint3D &out_ENU_point, const TGeodeticCoords &in_coords_origin) |
| Coordinates transformation from longitude/latitude/height to ENU (East-North-Up) X/Y/Z coordinates The WGS84 ellipsoid is used for the transformation. More... | |
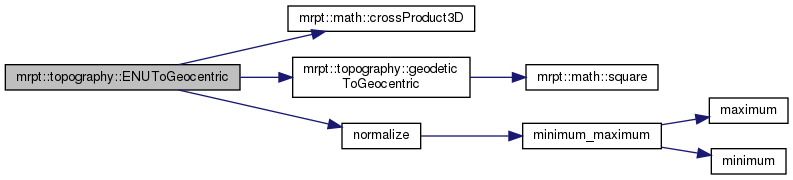
| void | mrpt::topography::ENUToGeocentric (const mrpt::math::TPoint3D &in_ENU_point, const TGeodeticCoords &in_coords_origin, TGeocentricCoords &out_coords, const TEllipsoid &ellip) |
| ENU to geocentric coordinates. More... | |
| void | mrpt::topography::geocentricToENU_WGS84 (const mrpt::math::TPoint3D &in_geocentric_point, mrpt::math::TPoint3D &out_ENU_point, const TGeodeticCoords &in_coords_origin) |
| ENU to EFEC (Geocentric) coordinates. More... | |
| void | mrpt::topography::geocentricToENU_WGS84 (const std::vector< mrpt::math::TPoint3D > &in_geocentric_points, std::vector< mrpt::math::TPoint3D > &out_ENU_points, const TGeodeticCoords &in_coords_origin) |
| void | mrpt::topography::geodeticToGeocentric_WGS84 (const TGeodeticCoords &in_coords, mrpt::math::TPoint3D &out_point) |
| Coordinates transformation from longitude/latitude/height to geocentric X/Y/Z coordinates (with a WGS84 geoid). More... | |
| void | mrpt::topography::geodeticToGeocentric (const TGeodeticCoords &in_coords, TGeocentricCoords &out_point, const TEllipsoid &ellip) |
| Coordinates transformation from longitude/latitude/height to geocentric X/Y/Z coordinates (with an specified geoid). More... | |
| void | mrpt::topography::geocentricToGeodetic (const TGeocentricCoords &in_point, TGeodeticCoords &out_coords, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| Coordinates transformation from geocentric X/Y/Z coordinates to longitude/latitude/height. More... | |
| void | mrpt::topography::transform7params (const mrpt::math::TPoint3D &in_point, const TDatum7Params &in_datum, mrpt::math::TPoint3D &out_point) |
| 7-parameter Bursa-Wolf transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X Y Z ]_local More... | |
| void | mrpt::topography::transform7params_TOPCON (const mrpt::math::TPoint3D &in_point, const TDatum7Params_TOPCON &in_datum, mrpt::math::TPoint3D &out_point) |
| 7-parameter Bursa-Wolf transformation TOPCON: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X Y Z ]_local More... | |
| void | mrpt::topography::transform10params (const mrpt::math::TPoint3D &in_point, const TDatum10Params &in_datum, mrpt::math::TPoint3D &out_point) |
| 10-parameter Molodensky-Badekas transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp] More... | |
| void | mrpt::topography::transformHelmert2D (const mrpt::math::TPoint2D &p, const TDatumHelmert2D &d, mrpt::math::TPoint2D &o) |
| Helmert 2D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp]. More... | |
| void | mrpt::topography::transformHelmert2D_TOPCON (const mrpt::math::TPoint2D &p, const TDatumHelmert2D_TOPCON &d, mrpt::math::TPoint2D &o) |
| Helmert 2D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp]. More... | |
| void | mrpt::topography::transformHelmert3D (const mrpt::math::TPoint3D &p, const TDatumHelmert3D &d, mrpt::math::TPoint3D &o) |
| Helmert3D transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 -RZ RY; RZ 1 -RX; -RY RX 1 ] [ X Y Z ]_local. More... | |
| void | mrpt::topography::transformHelmert3D_TOPCON (const mrpt::math::TPoint3D &p, const TDatumHelmert3D_TOPCON &d, mrpt::math::TPoint3D &o) |
| Helmert 3D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp]. More... | |
| void | mrpt::topography::transform1D (const mrpt::math::TPoint3D &p, const TDatum1DTransf &d, mrpt::math::TPoint3D &o) |
| 1D transformation: [ Z ]_WGS84 = (dy * X - dx * Y + Z)*(1+e)+DZ More... | |
| void | mrpt::topography::transfInterpolation (const mrpt::math::TPoint3D &p, const TDatumTransfInterpolation &d, mrpt::math::TPoint3D &o) |
| Interpolation: [ Z ]_WGS84 = (dy * X - dx * Y + Z)*(1+e)+DZ. More... | |
| void | mrpt::topography::UTMToGeodetic (double X, double Y, int zone, char hem, double &out_lon, double &out_lat, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| Returns the Geodetic coordinates of the UTM input point. More... | |
| void | mrpt::topography::UTMToGeodetic (const TUTMCoords &UTMCoords, const int &zone, const char &hem, TGeodeticCoords &GeodeticCoords, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| Returns the Geodetic coordinates of the UTM input point. More... | |
| void | mrpt::topography::GeodeticToUTM (double in_latitude_degrees, double in_longitude_degrees, double &out_UTM_x, double &out_UTM_y, int &out_UTM_zone, char &out_UTM_latitude_band, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| Convert latitude and longitude coordinates into UTM coordinates, computing the corresponding UTM zone and latitude band. More... | |
| void | mrpt::topography::geodeticToUTM (const TGeodeticCoords &GeodeticCoords, TUTMCoords &UTMCoords, int &UTMZone, char &UTMLatitudeBand, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| void | mrpt::topography::GeodeticToUTM (const TGeodeticCoords &GeodeticCoords, TUTMCoords &UTMCoords, int &UTMZone, char &UTMLatitudeBand, const TEllipsoid &ellip=TEllipsoid::Ellipsoid_WGS84()) |
| Convert latitude and longitude coordinates into UTM coordinates, computing the corresponding UTM zone and latitude band. More... | |
Miscellaneous | |
======================================================================= | |
| void | mrpt::topography::ENU_axes_from_WGS84 (double in_longitude_reference_degrees, double in_latitude_reference_degrees, double in_height_reference_meters, mrpt::math::TPose3D &out_ENU, bool only_angles=false) |
| Returns the East-North-Up (ENU) coordinate system associated to the given point. More... | |
| void | mrpt::topography::ENU_axes_from_WGS84 (const TGeodeticCoords &in_coords, mrpt::math::TPose3D &out_ENU, bool only_angles=false) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Typedef Documentation
◆ TGeocentricCoords
Definition at line 192 of file data_types.h.
◆ TUTMCoords
Definition at line 191 of file data_types.h.
Function Documentation
◆ ENU_axes_from_WGS84() [1/2]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 267 of file conversions.h.
References mrpt::topography::ENU_axes_from_WGS84(), mrpt::topography::TGeodeticCoords::height, mrpt::topography::TGeodeticCoords::lat, and mrpt::topography::TGeodeticCoords::lon.

◆ ENU_axes_from_WGS84() [2/2]
| void mrpt::topography::ENU_axes_from_WGS84 | ( | double | in_longitude_reference_degrees, |
| double | in_latitude_reference_degrees, | ||
| double | in_height_reference_meters, | ||
| mrpt::math::TPose3D & | out_ENU, | ||
| bool | only_angles = false |
||
| ) |
Returns the East-North-Up (ENU) coordinate system associated to the given point.
This is the reference employed in geodeticToENU_WGS84
- Parameters
-
only_angles If set to true, the (x,y,z) fields will be left zeroed.
- Note
- The "Up" (Z) direction in ENU is the normal to the ellipsoid, which coincides with the direction of an increasing geodetic height.
- See also
- geodeticToENU_WGS84
Definition at line 151 of file conversions.cpp.
References DEG2RAD, mrpt::topography::geodeticToGeocentric_WGS84(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::topography::ENU_axes_from_WGS84().


◆ ENUToGeocentric()
| void mrpt::topography::ENUToGeocentric | ( | const mrpt::math::TPoint3D & | p, |
| const TGeodeticCoords & | in_coords_origin, | ||
| TGeocentricCoords & | out_coords, | ||
| const TEllipsoid & | ellip | ||
| ) |
ENU to geocentric coordinates.
- See also
- geodeticToENU_WGS84
Definition at line 654 of file conversions.cpp.
References mrpt::math::crossProduct3D(), mrpt::topography::geodeticToGeocentric(), normalize(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ geocentricToENU_WGS84() [1/2]
| void mrpt::topography::geocentricToENU_WGS84 | ( | const mrpt::math::TPoint3D & | in_geocentric_point, |
| mrpt::math::TPoint3D & | out_ENU_point, | ||
| const TGeodeticCoords & | in_coords_origin | ||
| ) |
ENU to EFEC (Geocentric) coordinates.
- See also
- ENUToGeocentric, geodeticToENU_WGS84
Definition at line 61 of file conversions.cpp.
References DEG2RAD, mrpt::topography::geodeticToGeocentric_WGS84(), mrpt::topography::TGeodeticCoords::lat, mrpt::topography::TGeodeticCoords::lon, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::topography::geodeticToENU_WGS84().


◆ geocentricToENU_WGS84() [2/2]
| void mrpt::topography::geocentricToENU_WGS84 | ( | const std::vector< mrpt::math::TPoint3D > & | in_geocentric_points, |
| std::vector< mrpt::math::TPoint3D > & | out_ENU_points, | ||
| const TGeodeticCoords & | in_coords_origin | ||
| ) |
Definition at line 89 of file conversions.cpp.
References DEG2RAD, mrpt::topography::geodeticToGeocentric_WGS84(), mrpt::topography::TGeodeticCoords::lat, mrpt::topography::TGeodeticCoords::lon, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.

◆ geocentricToGeodetic()
| void mrpt::topography::geocentricToGeodetic | ( | const TGeocentricCoords & | in_point, |
| TGeodeticCoords & | out_coords, | ||
| const TEllipsoid & | ellip = TEllipsoid::Ellipsoid_WGS84() |
||
| ) |
Coordinates transformation from geocentric X/Y/Z coordinates to longitude/latitude/height.
- See also
- geodeticToGeocentric
Definition at line 260 of file conversions.cpp.
References mrpt::topography::TGeodeticCoords::height, mrpt::topography::TGeodeticCoords::lat, mrpt::topography::TGeodeticCoords::lon, RAD2DEG, mrpt::topography::TEllipsoid::sa, mrpt::topography::TEllipsoid::sb, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by do_test_geodetic_geocentric().

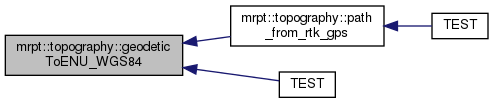
◆ geodeticToENU_WGS84()
| void mrpt::topography::geodeticToENU_WGS84 | ( | const TGeodeticCoords & | in_coords, |
| mrpt::math::TPoint3D & | out_ENU_point, | ||
| const TGeodeticCoords & | in_coords_origin | ||
| ) |
Coordinates transformation from longitude/latitude/height to ENU (East-North-Up) X/Y/Z coordinates The WGS84 ellipsoid is used for the transformation.
The coordinates are in 3D relative to some user-provided point, with local X axis being east-ward, Y north-ward, Z up-ward. For an explanation, refer to http://en.wikipedia.org/wiki/Reference_ellipsoid
- See also
- coordinatesTransformation_WGS84_geocentric, ENU_axes_from_WGS84, ENUToGeocentric
- Note
- The "Up" (Z) direction in ENU is the normal to the ellipsoid, which coincides with the direction of an increasing geodetic height.
Definition at line 127 of file conversions.cpp.
References mrpt::topography::geocentricToENU_WGS84(), and mrpt::topography::geodeticToGeocentric_WGS84().
Referenced by mrpt::topography::path_from_rtk_gps(), and TEST().

◆ geodeticToGeocentric()
| void mrpt::topography::geodeticToGeocentric | ( | const TGeodeticCoords & | in_coords, |
| TGeocentricCoords & | out_point, | ||
| const TEllipsoid & | ellip | ||
| ) |
Coordinates transformation from longitude/latitude/height to geocentric X/Y/Z coordinates (with an specified geoid).
- See also
- geocentricToGeodetic
Definition at line 229 of file conversions.cpp.
References DEG2RAD, mrpt::topography::TGeodeticCoords::height, mrpt::obs::gnss::lat, mrpt::topography::TGeodeticCoords::lat, mrpt::obs::gnss::lon, mrpt::topography::TGeodeticCoords::lon, mrpt::topography::TEllipsoid::sa, mrpt::topography::TEllipsoid::sb, mrpt::math::square(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by do_test_geodetic_geocentric(), and mrpt::topography::ENUToGeocentric().


◆ geodeticToGeocentric_WGS84()
| void mrpt::topography::geodeticToGeocentric_WGS84 | ( | const TGeodeticCoords & | in_coords, |
| mrpt::math::TPoint3D & | out_point | ||
| ) |
Coordinates transformation from longitude/latitude/height to geocentric X/Y/Z coordinates (with a WGS84 geoid).
The WGS84 ellipsoid is used for the transformation. The coordinates are in 3D where the reference is the center of the Earth. For an explanation, refer to http://en.wikipedia.org/wiki/Reference_ellipsoid
- See also
- geodeticToENU_WGS84
Definition at line 194 of file conversions.cpp.
References DEG2RAD, mrpt::topography::TGeodeticCoords::height, mrpt::obs::gnss::lat, mrpt::topography::TGeodeticCoords::lat, mrpt::obs::gnss::lon, mrpt::topography::TGeodeticCoords::lon, mrpt::math::square(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::topography::ENU_axes_from_WGS84(), mrpt::topography::geocentricToENU_WGS84(), and mrpt::topography::geodeticToENU_WGS84().


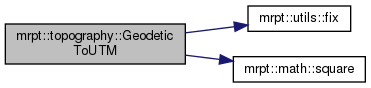
◆ geodeticToUTM()
| void mrpt::topography::geodeticToUTM | ( | const TGeodeticCoords & | GeodeticCoords, |
| TUTMCoords & | UTMCoords, | ||
| int & | UTMZone, | ||
| char & | UTMLatitudeBand, | ||
| const TEllipsoid & | ellip = TEllipsoid::Ellipsoid_WGS84() |
||
| ) |
Definition at line 334 of file conversions.cpp.
References mrpt::obs::gnss::A1, DEG2RAD, eps, mrpt::utils::fix(), mrpt::topography::TGeodeticCoords::height, mrpt::obs::gnss::lat, mrpt::topography::TGeodeticCoords::lat, mrpt::obs::gnss::lon, mrpt::topography::TGeodeticCoords::lon, mrpt::topography::TEllipsoid::sa, mrpt::topography::TEllipsoid::sb, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.

◆ GeodeticToUTM() [1/2]
|
inline |
Convert latitude and longitude coordinates into UTM coordinates, computing the corresponding UTM zone and latitude band.
This method is based on public code by Gabriel Ruiz Martinez and Rafael Palacios. Example:
Definition at line 235 of file conversions.h.
References mrpt::topography::GeodeticToUTM(), mrpt::topography::TGeodeticCoords::height, mrpt::topography::TGeodeticCoords::lat, mrpt::topography::TGeodeticCoords::lon, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.

◆ GeodeticToUTM() [2/2]
| void mrpt::topography::GeodeticToUTM | ( | double | in_latitude_degrees, |
| double | in_longitude_degrees, | ||
| double & | out_UTM_x, | ||
| double & | out_UTM_y, | ||
| int & | out_UTM_zone, | ||
| char & | out_UTM_latitude_band, | ||
| const TEllipsoid & | ellip = TEllipsoid::Ellipsoid_WGS84() |
||
| ) |
Convert latitude and longitude coordinates into UTM coordinates, computing the corresponding UTM zone and latitude band.
This method is based on public code by Gabriel Ruiz Martinez and Rafael Palacios. Example:
Definition at line 424 of file conversions.cpp.
References mrpt::obs::gnss::a1, mrpt::obs::gnss::a2, DEG2RAD, mrpt::utils::fix(), mrpt::obs::gnss::lat, mrpt::obs::gnss::lon, mrpt::topography::TEllipsoid::sa, mrpt::topography::TEllipsoid::sb, and mrpt::math::square().
Referenced by mrpt::topography::GeodeticToUTM().

◆ operator!=() [1/2]
Definition at line 28 of file conversions.cpp.
◆ operator!=() [2/2]
| bool mrpt::topography::operator!= | ( | const TGeodeticCoords & | a, |
| const TGeodeticCoords & | o | ||
| ) |
Definition at line 37 of file conversions.cpp.
◆ operator<<()
| std::ostream & mrpt::topography::operator<< | ( | std::ostream & | out, |
| const TCoords & | o | ||
| ) |
Definition at line 53 of file conversions.cpp.
References mrpt::topography::TCoords::getAsString().

◆ operator==() [1/2]
Definition at line 24 of file conversions.cpp.
References mrpt::topography::TCoords::decimal_value.
◆ operator==() [2/2]
| bool mrpt::topography::operator== | ( | const TGeodeticCoords & | a, |
| const TGeodeticCoords & | o | ||
| ) |
Definition at line 32 of file conversions.cpp.
References mrpt::topography::TGeodeticCoords::height, mrpt::topography::TGeodeticCoords::lat, and mrpt::topography::TGeodeticCoords::lon.
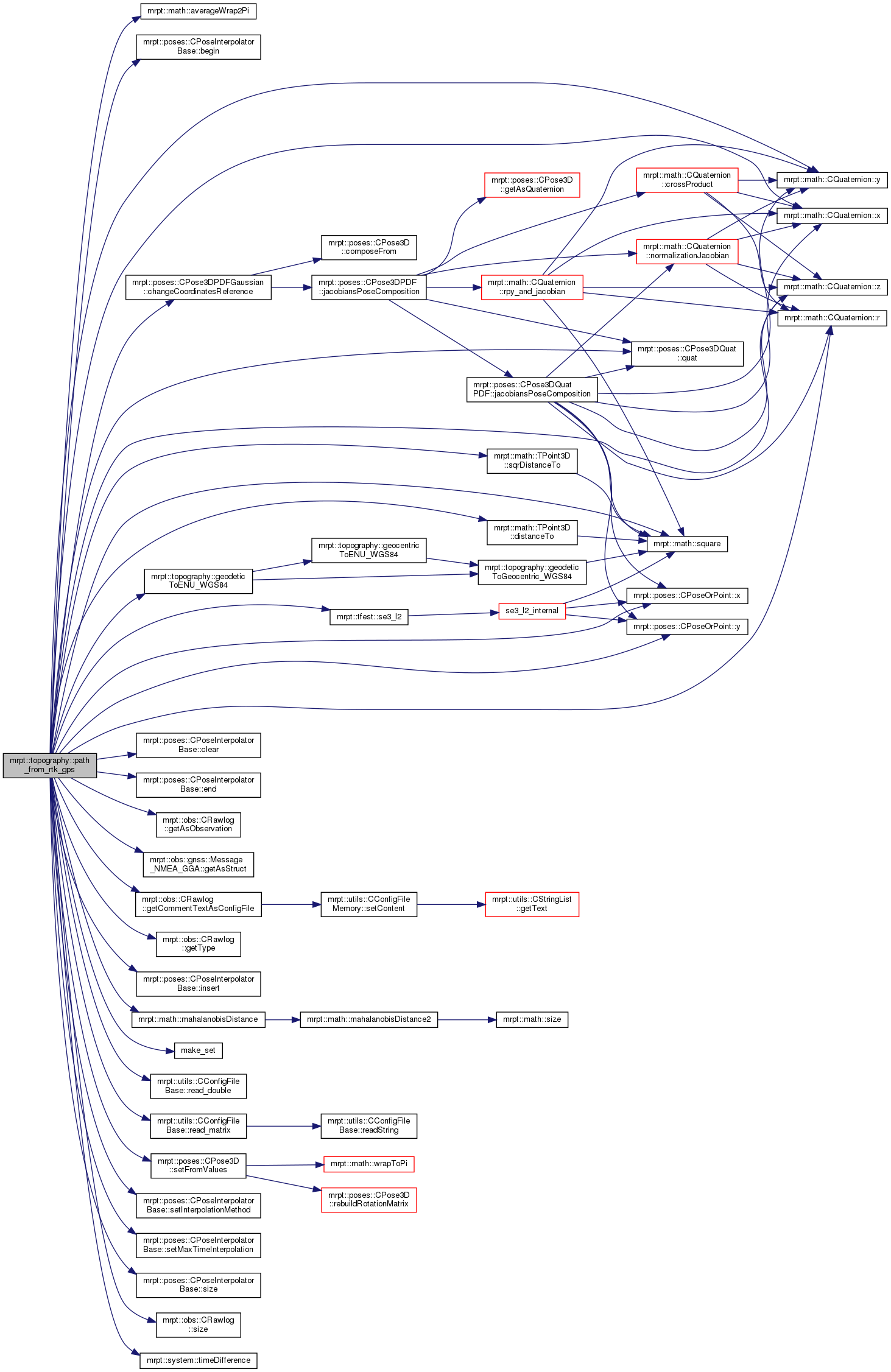
◆ path_from_rtk_gps()
| void mrpt::topography::path_from_rtk_gps | ( | mrpt::poses::CPose3DInterpolator & | robot_path, |
| const mrpt::obs::CRawlog & | rawlog, | ||
| size_t | rawlog_first, | ||
| size_t | rawlog_last, | ||
| bool | isGUI = false, |
||
| bool | disableGPSInterp = false, |
||
| int | path_smooth_filter_size = 2, |
||
| TPathFromRTKInfo * | outInfo = nullptr |
||
| ) |
Reconstruct the path of a vehicle equipped with 3 RTK GPSs.
- Parameters
-
robot_path [OUT] The reconstructed vehicle path rawlog [IN] The dataset. It must contain mrpt::obs::CObservationGPS observations with GGA datums. rawlog_first [IN] The index of the first entry to process (first=0) rawlog_last [IN] The index of the last entry to process isGUI [IN] If set to true, some progress dialogs will be shown during the computation (requires MRPT built with support for wxWidgets). disableGPSInterp [IN] Whether to interpolate missing GPS readings between very close datums. path_smooth_filter_size [IN] Size of the window in the pitch & roll noise filtering. outInfo [OUT] Optional output: additional information from the optimization
For more details on the method, refer to the paper: (...)
- See also
- mrpt::topography
Definition at line 51 of file path_from_rtk_gps.cpp.
References mrpt::obs::gnss::Message_NMEA_GGA::content_t::altitude_meters, ASSERT_, mrpt::math::averageWrap2Pi(), mrpt::poses::CPoseInterpolatorBase< DIM >::begin(), mrpt::topography::TPathFromRTKInfo::best_gps_path, mrpt::poses::CPose3DPDFGaussian::changeCoordinatesReference(), CLASS_ID, mrpt::poses::CPoseInterpolatorBase< DIM >::clear(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::math::TPoint3D::distanceTo(), mrpt::poses::CPoseInterpolatorBase< DIM >::end(), mrpt::obs::gnss::Message_NMEA_GGA::fields, mrpt::obs::gnss::Message_NMEA_GGA::content_t::fix_quality, mrpt::topography::geodeticToENU_WGS84(), mrpt::obs::CRawlog::getAsObservation(), mrpt::obs::gnss::Message_NMEA_GGA::getAsStruct(), mrpt::obs::CRawlog::getCommentTextAsConfigFile(), mrpt::obs::CRawlog::getType(), mrpt::poses::imSSLSLL, mrpt::poses::CPoseInterpolatorBase< DIM >::insert(), mrpt::obs::gnss::Message_NMEA_GGA::content_t::latitude_degrees, mrpt::obs::gnss::Message_NMEA_GGA::content_t::longitude_degrees, mrpt::topography::TPathFromRTKInfo::mahalabis_quality_measure, mrpt::math::mahalanobisDistance(), make_set(), mrpt::poses::CPose3DPDFGaussian::mean, MRPT_CHECK_NORMAL_NUMBER, MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, mrpt::poses::CPose3DQuat::quat(), mrpt::math::CQuaternion< T >::r(), mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_matrix(), mrpt::tfest::se3_l2(), mrpt::poses::CPose3D::setFromValues(), mrpt::poses::CPoseInterpolatorBase< DIM >::setInterpolationMethod(), mrpt::poses::CPoseInterpolatorBase< DIM >::setMaxTimeInterpolation(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), mrpt::obs::CRawlog::size(), mrpt::math::TPoint3D::sqrDistanceTo(), mrpt::math::square(), THROW_EXCEPTION, mrpt::system::timeDifference(), mrpt::topography::TPathFromRTKInfo::vehicle_uncertainty, mrpt::topography::TPathFromRTKInfo::W_star, mrpt::math::CQuaternion< T >::x(), mrpt::math::TPoint3D::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::math::CQuaternion< T >::y(), mrpt::math::TPoint3D::y, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), mrpt::math::CQuaternion< T >::z(), and mrpt::math::TPoint3D::z.
Referenced by TEST().

◆ transfInterpolation()
| void mrpt::topography::transfInterpolation | ( | const mrpt::math::TPoint3D & | p, |
| const TDatumTransfInterpolation & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
Interpolation: [ Z ]_WGS84 = (dy * X - dx * Y + Z)*(1+e)+DZ.
1D transformation: [ X;Y ]_WGS84 = [X;Y]_locales+[1 -sin(d.beta);0 cos(d.beta)]*[x*d.dSx;y*d.dSy ]
- See also
- transformHelmert3D
Definition at line 642 of file conversions.cpp.
References mrpt::topography::TDatumTransfInterpolation::beta, mrpt::topography::TDatumTransfInterpolation::dSx, mrpt::topography::TDatumTransfInterpolation::dSy, mrpt::topography::TDatumTransfInterpolation::dX, mrpt::topography::TDatumTransfInterpolation::dY, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ transform10params()
| void mrpt::topography::transform10params | ( | const mrpt::math::TPoint3D & | p, |
| const TDatum10Params & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
10-parameter Molodensky-Badekas transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp]
- See also
- transform7params
Definition at line 551 of file conversions.cpp.
References mrpt::topography::TDatum10Params::dS, mrpt::topography::TDatum10Params::dX, mrpt::topography::TDatum10Params::dY, mrpt::topography::TDatum10Params::dZ, mrpt::topography::TDatum10Params::Rx, mrpt::topography::TDatum10Params::Ry, mrpt::topography::TDatum10Params::Rz, mrpt::math::TPoint3D::x, mrpt::topography::TDatum10Params::Xp, mrpt::math::TPoint3D::y, mrpt::topography::TDatum10Params::Yp, mrpt::math::TPoint3D::z, and mrpt::topography::TDatum10Params::Zp.
◆ transform1D()
| void mrpt::topography::transform1D | ( | const mrpt::math::TPoint3D & | p, |
| const TDatum1DTransf & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
1D transformation: [ Z ]_WGS84 = (dy * X - dx * Y + Z)*(1+e)+DZ
- See also
- transformHelmert3D
Definition at line 628 of file conversions.cpp.
References mrpt::topography::TDatum1DTransf::dS, mrpt::topography::TDatum1DTransf::dX, mrpt::topography::TDatum1DTransf::dY, mrpt::topography::TDatum1DTransf::DZ, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ transform7params()
| void mrpt::topography::transform7params | ( | const mrpt::math::TPoint3D & | p, |
| const TDatum7Params & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
7-parameter Bursa-Wolf transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X Y Z ]_local
- See also
- transform10params
Definition at line 519 of file conversions.cpp.
References mrpt::topography::TDatum7Params::dS, mrpt::topography::TDatum7Params::dX, mrpt::topography::TDatum7Params::dY, mrpt::topography::TDatum7Params::dZ, mrpt::topography::TDatum7Params::Rx, mrpt::topography::TDatum7Params::Ry, mrpt::topography::TDatum7Params::Rz, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::topography::transformHelmert3D().

◆ transform7params_TOPCON()
| void mrpt::topography::transform7params_TOPCON | ( | const mrpt::math::TPoint3D & | p, |
| const TDatum7Params_TOPCON & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
7-parameter Bursa-Wolf transformation TOPCON: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 RZ -RY; -RZ 1 RX; RY -RX 1 ] [ X Y Z ]_local
- See also
- transform10params
Definition at line 535 of file conversions.cpp.
References mrpt::topography::TDatum7Params_TOPCON::dS, mrpt::topography::TDatum7Params_TOPCON::dX, mrpt::topography::TDatum7Params_TOPCON::dY, mrpt::topography::TDatum7Params_TOPCON::dZ, mrpt::topography::TDatum7Params_TOPCON::m11, mrpt::topography::TDatum7Params_TOPCON::m12, mrpt::topography::TDatum7Params_TOPCON::m13, mrpt::topography::TDatum7Params_TOPCON::m21, mrpt::topography::TDatum7Params_TOPCON::m22, mrpt::topography::TDatum7Params_TOPCON::m23, mrpt::topography::TDatum7Params_TOPCON::m31, mrpt::topography::TDatum7Params_TOPCON::m32, mrpt::topography::TDatum7Params_TOPCON::m33, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ transformHelmert2D()
| void mrpt::topography::transformHelmert2D | ( | const mrpt::math::TPoint2D & | p, |
| const TDatumHelmert2D & | d, | ||
| mrpt::math::TPoint2D & | o | ||
| ) |
Helmert 2D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp].
- See also
- transformHelmert3D
Definition at line 571 of file conversions.cpp.
References mrpt::topography::TDatumHelmert2D::alpha, mrpt::topography::TDatumHelmert2D::dS, mrpt::topography::TDatumHelmert2D::dX, mrpt::topography::TDatumHelmert2D::dY, mrpt::math::TPoint2D::x, mrpt::topography::TDatumHelmert2D::Xp, mrpt::math::TPoint2D::y, and mrpt::topography::TDatumHelmert2D::Yp.
◆ transformHelmert2D_TOPCON()
| void mrpt::topography::transformHelmert2D_TOPCON | ( | const mrpt::math::TPoint2D & | p, |
| const TDatumHelmert2D_TOPCON & | d, | ||
| mrpt::math::TPoint2D & | o | ||
| ) |
Helmert 2D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp].
- See also
- transformHelmert3D
Definition at line 589 of file conversions.cpp.
References mrpt::topography::TDatumHelmert2D_TOPCON::a, mrpt::topography::TDatumHelmert2D_TOPCON::b, mrpt::topography::TDatumHelmert2D_TOPCON::c, mrpt::topography::TDatumHelmert2D_TOPCON::d, mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ transformHelmert3D()
| void mrpt::topography::transformHelmert3D | ( | const mrpt::math::TPoint3D & | p, |
| const TDatumHelmert3D & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
Helmert3D transformation: [ X Y Z ]_WGS84 = [ dX dY dZ ] + ( 1 + dS ) [ 1 -RZ RY; RZ 1 -RX; -RY RX 1 ] [ X Y Z ]_local.
Helmert 3D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp].
- See also
- transformHelmert2D
- transformHelmert3D
Definition at line 602 of file conversions.cpp.
References mrpt::topography::TDatumHelmert3D::dS, mrpt::topography::TDatumHelmert3D::dX, mrpt::topography::TDatumHelmert3D::dY, mrpt::topography::TDatumHelmert3D::dZ, mrpt::topography::TDatumHelmert3D::Rx, mrpt::topography::TDatumHelmert3D::Ry, mrpt::topography::TDatumHelmert3D::Rz, and mrpt::topography::transform7params().

◆ transformHelmert3D_TOPCON()
| void mrpt::topography::transformHelmert3D_TOPCON | ( | const mrpt::math::TPoint3D & | p, |
| const TDatumHelmert3D_TOPCON & | d, | ||
| mrpt::math::TPoint3D & | o | ||
| ) |
Helmert 3D transformation: [ X Y ]_WGS84 = [ dX dY ] + ( 1 + dS ) [ cos(alpha) -sin(alpha); sin(alpha) cos(alpha) ] [ X-Xp Y-Yp Z-Zp ]_local + [Xp Yp Zp].
- See also
- transformHelmert3D
Definition at line 615 of file conversions.cpp.
References mrpt::topography::TDatumHelmert3D_TOPCON::a, mrpt::topography::TDatumHelmert3D_TOPCON::b, mrpt::topography::TDatumHelmert3D_TOPCON::c, mrpt::topography::TDatumHelmert3D_TOPCON::d, mrpt::topography::TDatumHelmert3D_TOPCON::e, mrpt::topography::TDatumHelmert3D_TOPCON::f, mrpt::topography::TDatumHelmert3D_TOPCON::g, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ UTMToGeodetic() [1/2]
|
inline |
Returns the Geodetic coordinates of the UTM input point.
- Parameters
-
UTMCoords UTM input coordinates. zone time zone (Spanish: "huso"). hem hemisphere ('N'/'n' for North or 'S'/s' for South ). An exception will be raised on any other value. GeodeticCoords Out geodetic coordinates. ellip the reference ellipsoid used for the transformation (default: WGS84)
Definition at line 182 of file conversions.h.
References mrpt::topography::TCoords::decimal_value, mrpt::topography::TGeodeticCoords::height, mrpt::topography::TGeodeticCoords::lat, mrpt::topography::TGeodeticCoords::lon, mrpt::topography::UTMToGeodetic(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.

◆ UTMToGeodetic() [2/2]
| void mrpt::topography::UTMToGeodetic | ( | double | X, |
| double | Y, | ||
| int | zone, | ||
| char | hem, | ||
| double & | out_lon, | ||
| double & | out_lat, | ||
| const TEllipsoid & | ellip = TEllipsoid::Ellipsoid_WGS84() |
||
| ) |
Returns the Geodetic coordinates of the UTM input point.
- Parameters
-
X East coordinate of the input point. Y North coordinate of the input point. zone time zone (Spanish: "huso"). hem hemisphere ('N'/'n' for North or 'S'/s' for South ). An exception will be raised on any other value. ellip the reference ellipsoid used for the transformation (default: WGS84) out_lat Out latitude, in degrees. out_lon Out longitude, in degrees.
Definition at line 290 of file conversions.cpp.
References mrpt::obs::gnss::A1, mrpt::obs::gnss::a2, ASSERT_, mrpt::obs::gnss::b2, eps, RAD2DEG, mrpt::topography::TEllipsoid::sa, mrpt::topography::TEllipsoid::sb, and mrpt::math::square().
Referenced by mrpt::topography::UTMToGeodetic().

