Detailed Description
High-level communication class.
The class uses CMT level 2, but does not inherit from it. If software needs
to access the level 2 components, it needs to be done through the getCmt2s() and getCmt2f() functions.
All device identification is done through device Ids in CMT level 3.
#include <xSens_MT3/cmt3.h>
Public Member Functions | |
| Cmt3 () | |
| Default constructor, initializes all members to their default values. More... | |
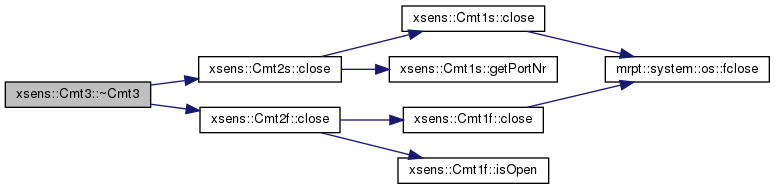
| ~Cmt3 () | |
| Destructor, de-initializes, frees memory allocated for buffers, etc. More... | |
| XsensResultValue | closePort (bool gotoConfigFirst=true) |
| Close the communication port. More... | |
| XsensResultValue | getBatteryLevel (uint8_t &level) |
| Get an Xbus Master's battery level. More... | |
| XsensResultValue | getBaudrate (uint32_t &baudrate) |
| Get the baudrate used by a port. More... | |
| XsensResultValue | getBluetoothState (bool &enabled) |
| Get the state of the bluetooth communication. More... | |
| XsensResultValue | getBusId (uint8_t &busId, const CmtDeviceId deviceId=CMT_DID_MASTER) const |
| Retrieve the BusId of a device. More... | |
| XsensResultValue | getBusPowerState (bool &enabled) |
| Get the state of the Xbus power. More... | |
| Cmt2f * | getCmt2f (void) |
| Return a reference to the embedded Cmt2f (logfile) object. More... | |
| Cmt2s * | getCmt2s (void) |
| Return a reference to the embedded Cmt2s (comm port) object. More... | |
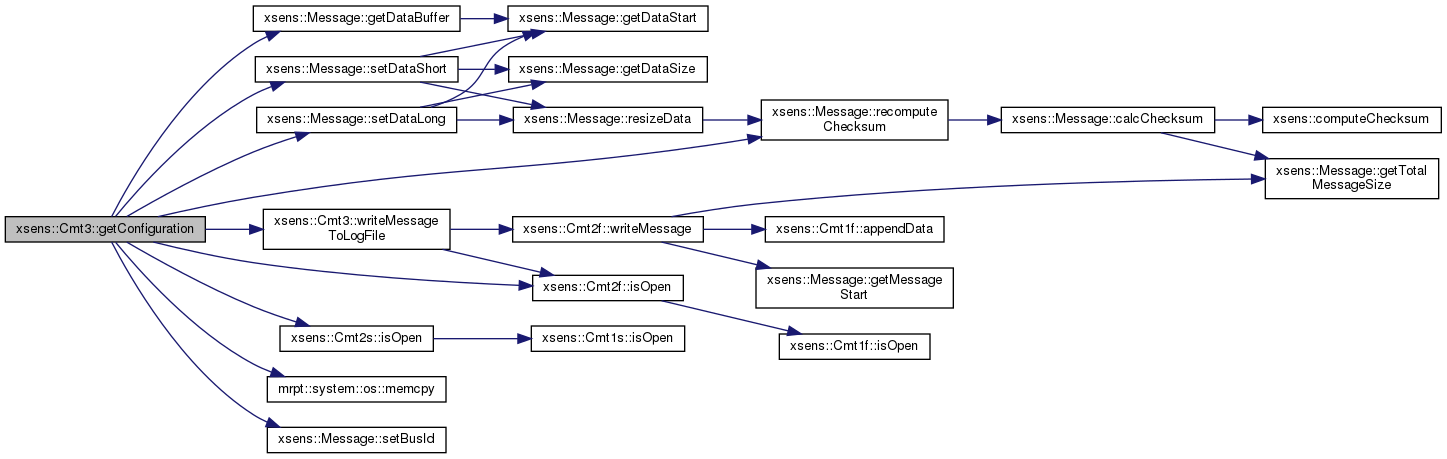
| XsensResultValue | getConfiguration (CmtDeviceConfiguration &configuration) |
| Get device configuration. More... | |
| XsensResultValue | getDataLength (uint32_t &length, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Retrieve data size. More... | |
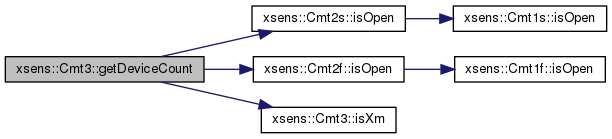
| uint32_t | getDeviceCount (void) const |
| Retrieve total device count. More... | |
| XsensResultValue | getDeviceId (const uint8_t busId, CmtDeviceId &deviceId) const |
| Retrieve the DeviceId of a device given its Bus ID. More... | |
| XsensResultValue | getDeviceMode (CmtDeviceMode &mode, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return device mode. More... | |
| XsensResultValue | getDeviceMode2 (CmtDeviceMode2 &mode, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return device mode2. More... | |
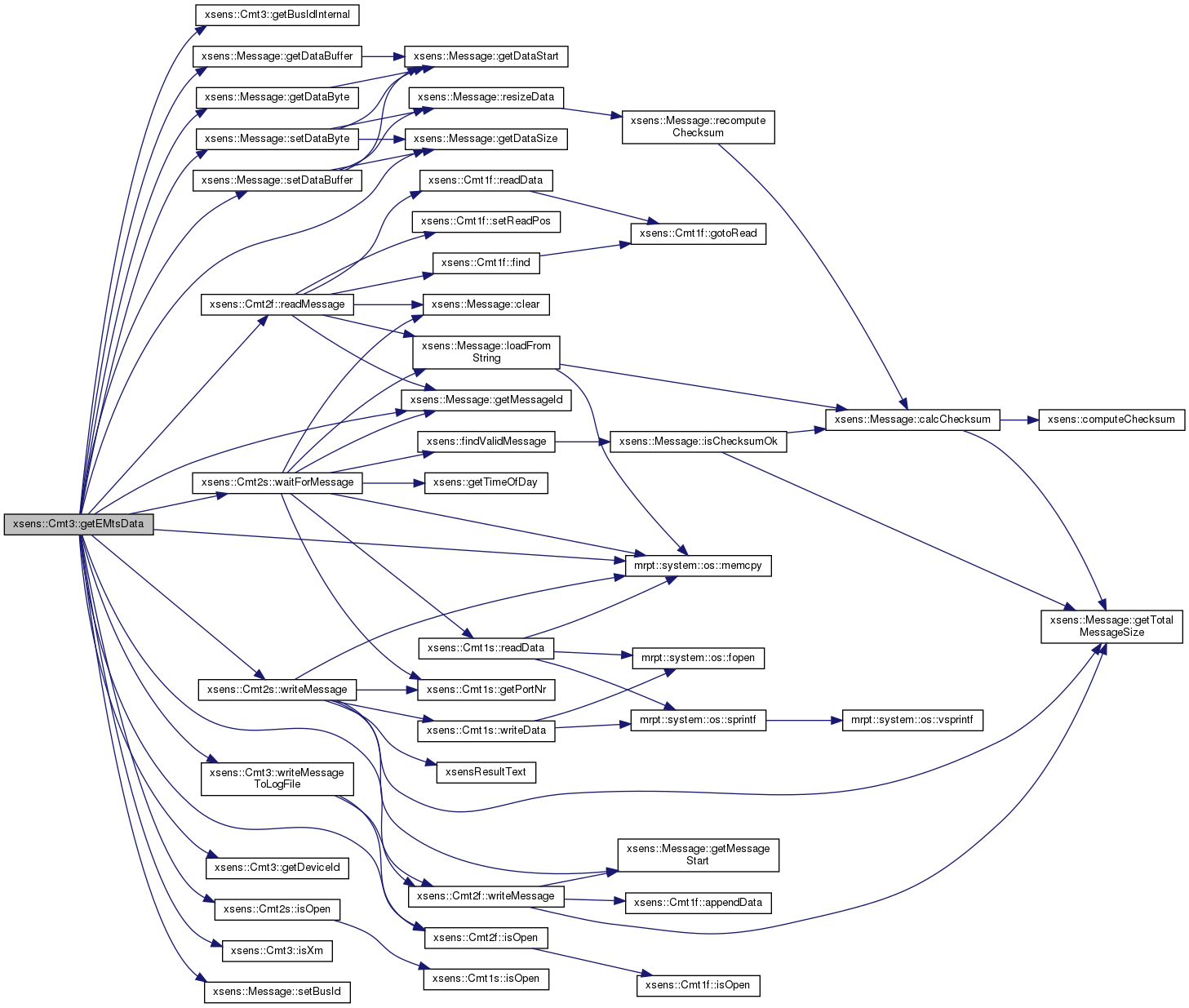
| XsensResultValue | getEMtsData (void *buffer, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Retrieve the eMts data of the specified sensor(s). More... | |
| XsensResultValue | getErrorMode (uint16_t &mode, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return the error mode of the device. More... | |
| XsensResultValue | getFirmwareRevision (CmtVersion &revision, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return Firmware revision. More... | |
| XsensResultValue | getHeading (double &heading, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return the heading offset. More... | |
| XsensResultValue | getLastResult (void) const |
| Return the error code of the last user function call. More... | |
| XsensResultValue | getHwError (CmtDeviceId &did) const |
| Return the last Hardware error code. More... | |
| void | clearHwError (void) |
| Reset the hardware error code. More... | |
| XsensResultValue | getLocationId (uint16_t &locationId, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return the location ID of a sensor. More... | |
| XsensResultValue | getLogFileReadPosition (CmtFilePos &pos) |
| Retrieve the read position of the log file. More... | |
| XsensResultValue | getLogFileSize (CmtFilePos &size) |
| Retrieve the size of the open log file in bytes. More... | |
| XsensResultValue | getLogFileName (char *filename) |
| Retrieve the name of the open log file or an empty string if no logfile is open. More... | |
| XsensResultValue | getLogFileName (wchar_t *filename) |
| Retrieve the name of the open log file or an empty string if no logfile is open. More... | |
| XsensResultValue | getMagneticDeclination (double &declination, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return the stored magnetic declination. More... | |
| CmtDeviceId | getMasterId (void) |
| uint16_t | getMtCount (void) const |
| Return the device Id of the first. More... | |
| XsensResultValue | getMtDeviceId (const uint8_t index, CmtDeviceId &deviceId) const |
| XsensResultValue | getPortNr (uint8_t &port) const |
| Return the device Id of an MT device. More... | |
| XsensResultValue | getProductCode (char *productCode, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Return product code. More... | |
| uint16_t | getSampleFrequency (void) |
| Return current sample frequency. More... | |
| XsensResultValue | getSerialBaudrate (uint32_t &baudrate) |
| Return the baud rate used for serial communication. More... | |
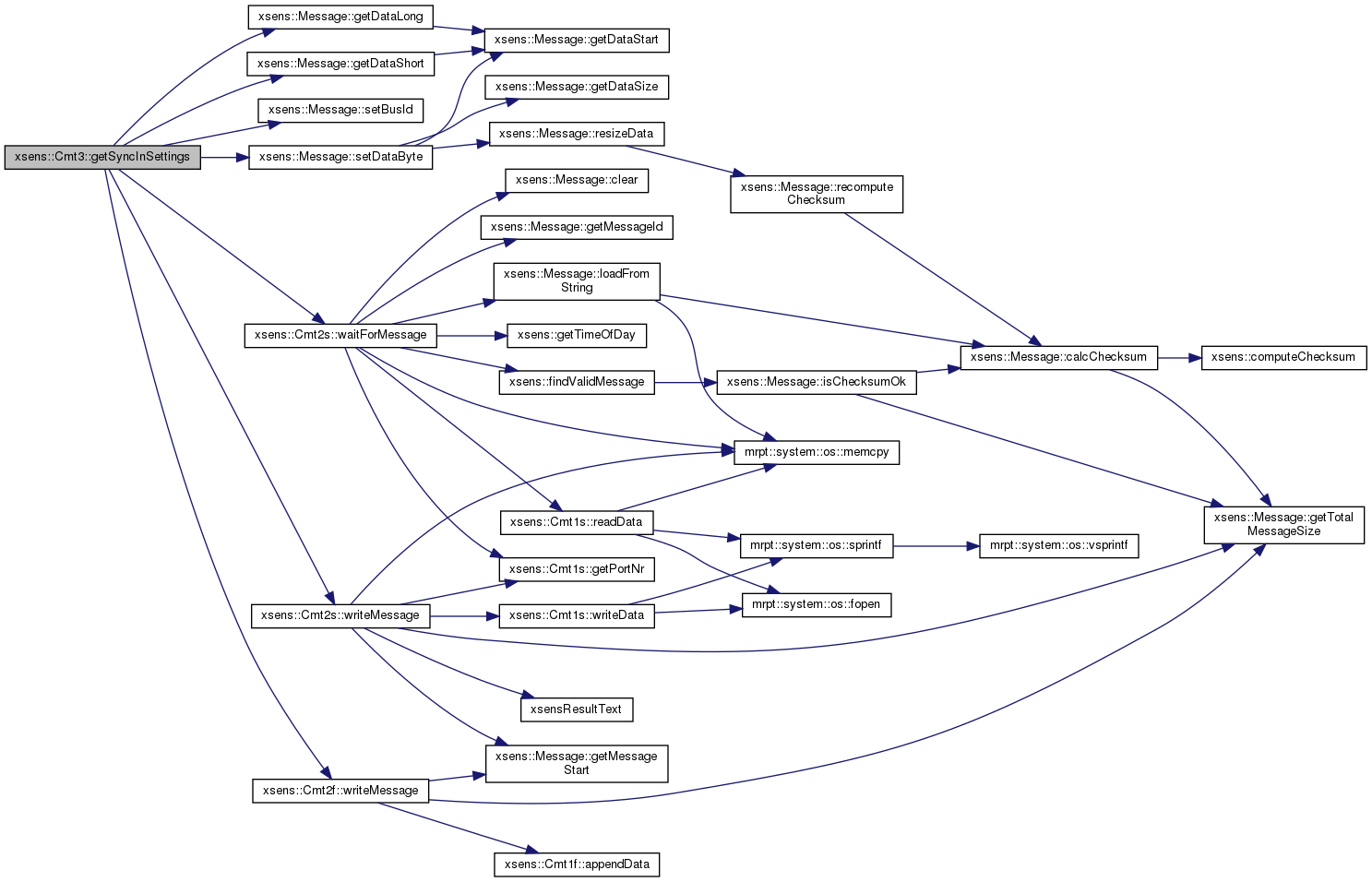
| XsensResultValue | getSyncInSettings (CmtSyncInSettings &settings) |
| Retrieve the inbound synchronization settings of the master MT device. More... | |
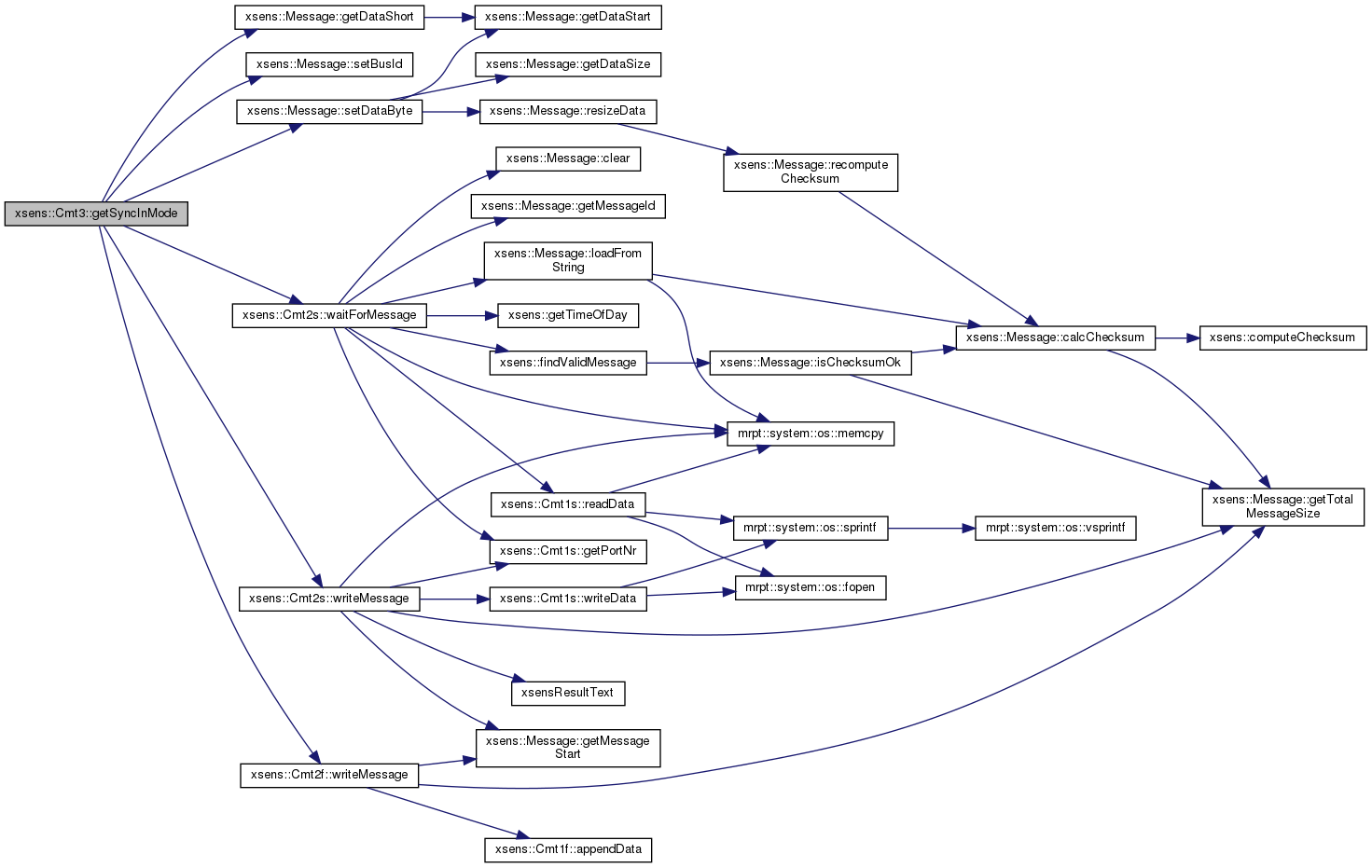
| XsensResultValue | getSyncInMode (uint16_t &mode) |
| Retrieve the inbound synchronization mode of an MT device. More... | |
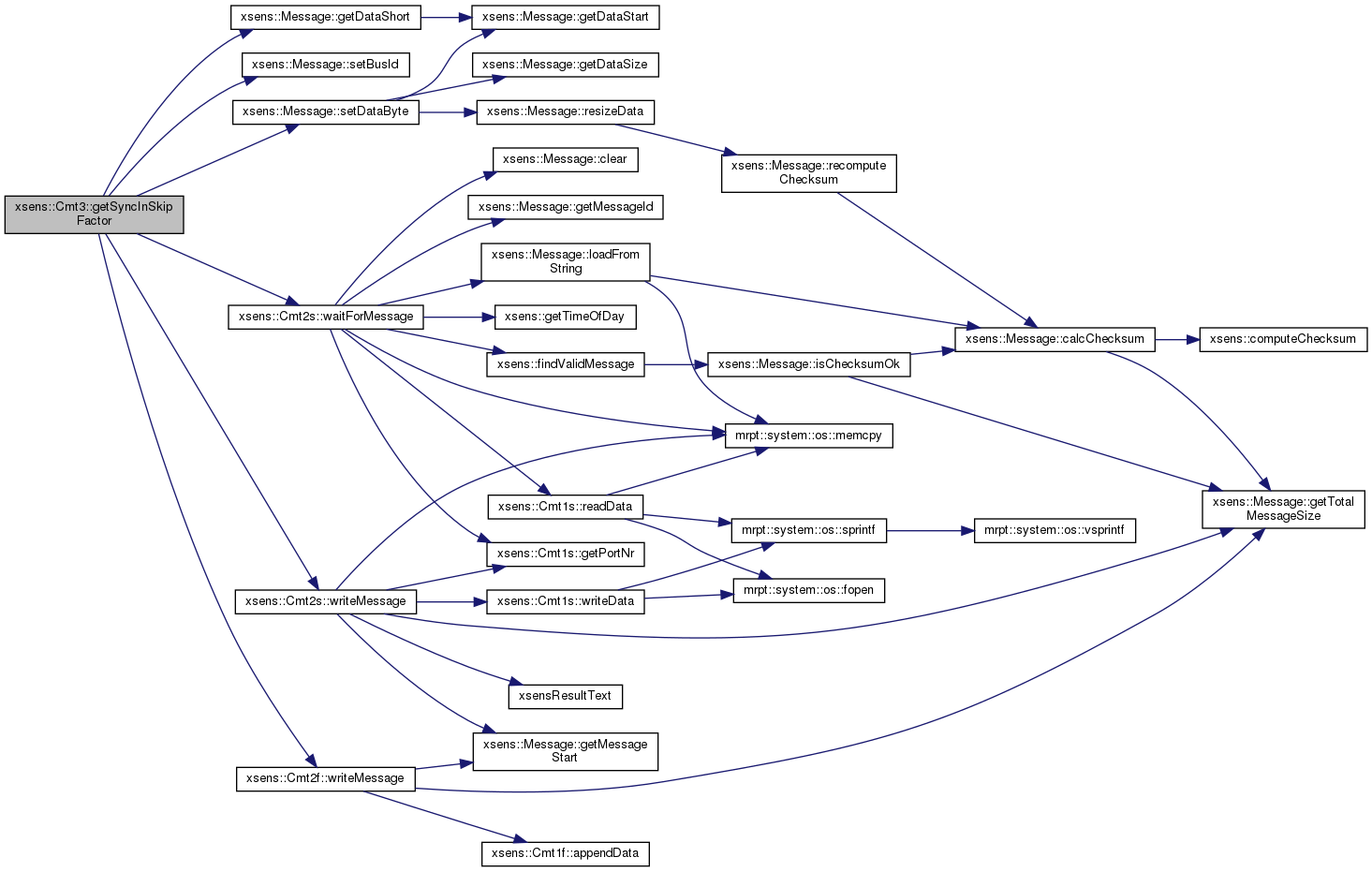
| XsensResultValue | getSyncInSkipFactor (uint16_t &skipFactor) |
| Retrieve the inbound synchronization skip factor of an MT device. More... | |
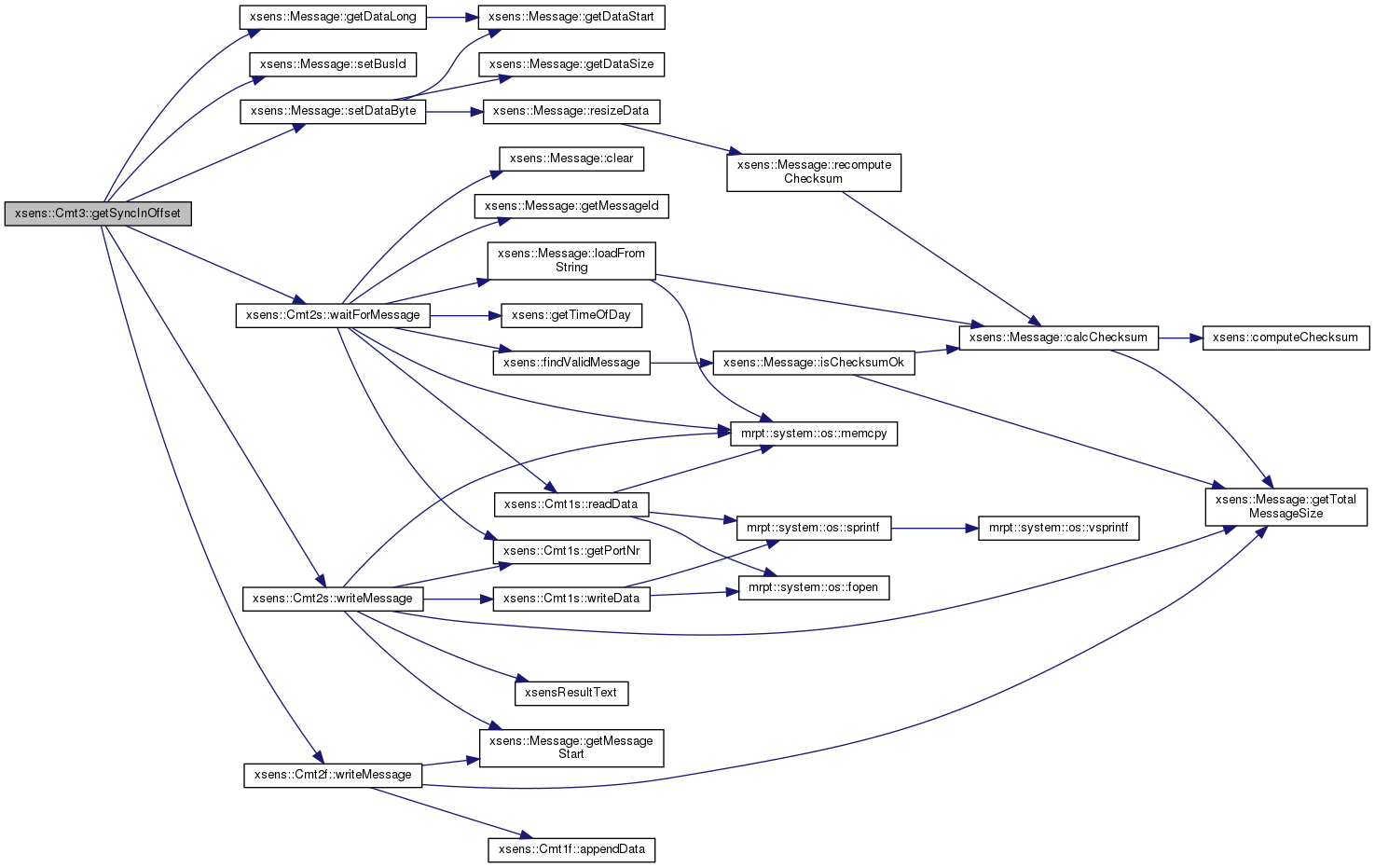
| XsensResultValue | getSyncInOffset (uint32_t &offset) |
| Retrieve the inbound synchronization offset of an MT device. More... | |
| XsensResultValue | getSyncMode (uint8_t &mode) |
| Retrieve the sync mode of the Xbus Master. More... | |
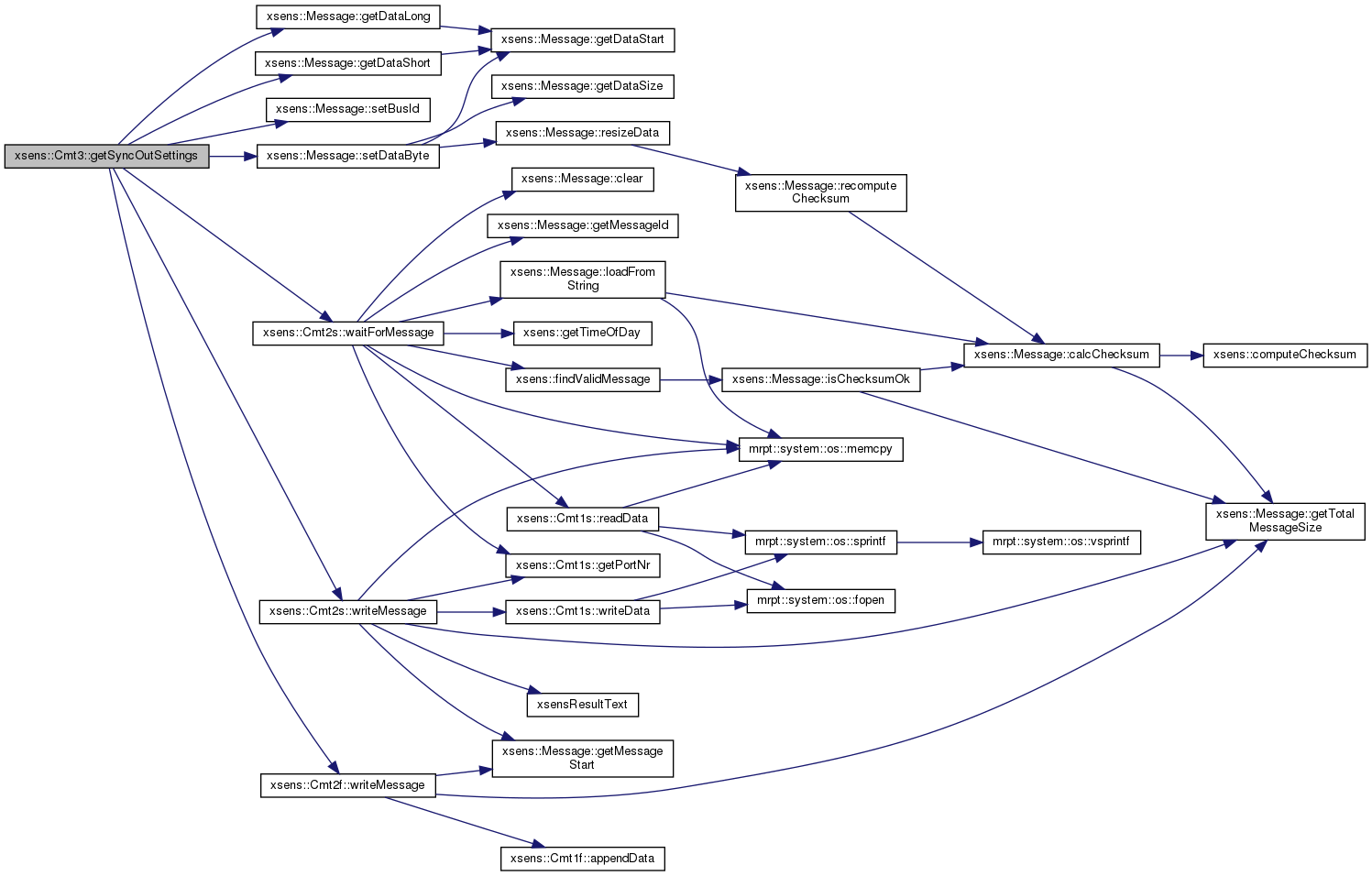
| XsensResultValue | getSyncOutSettings (CmtSyncOutSettings &settings) |
| Retrieve the outbound synchronization settings of the master MT device. More... | |
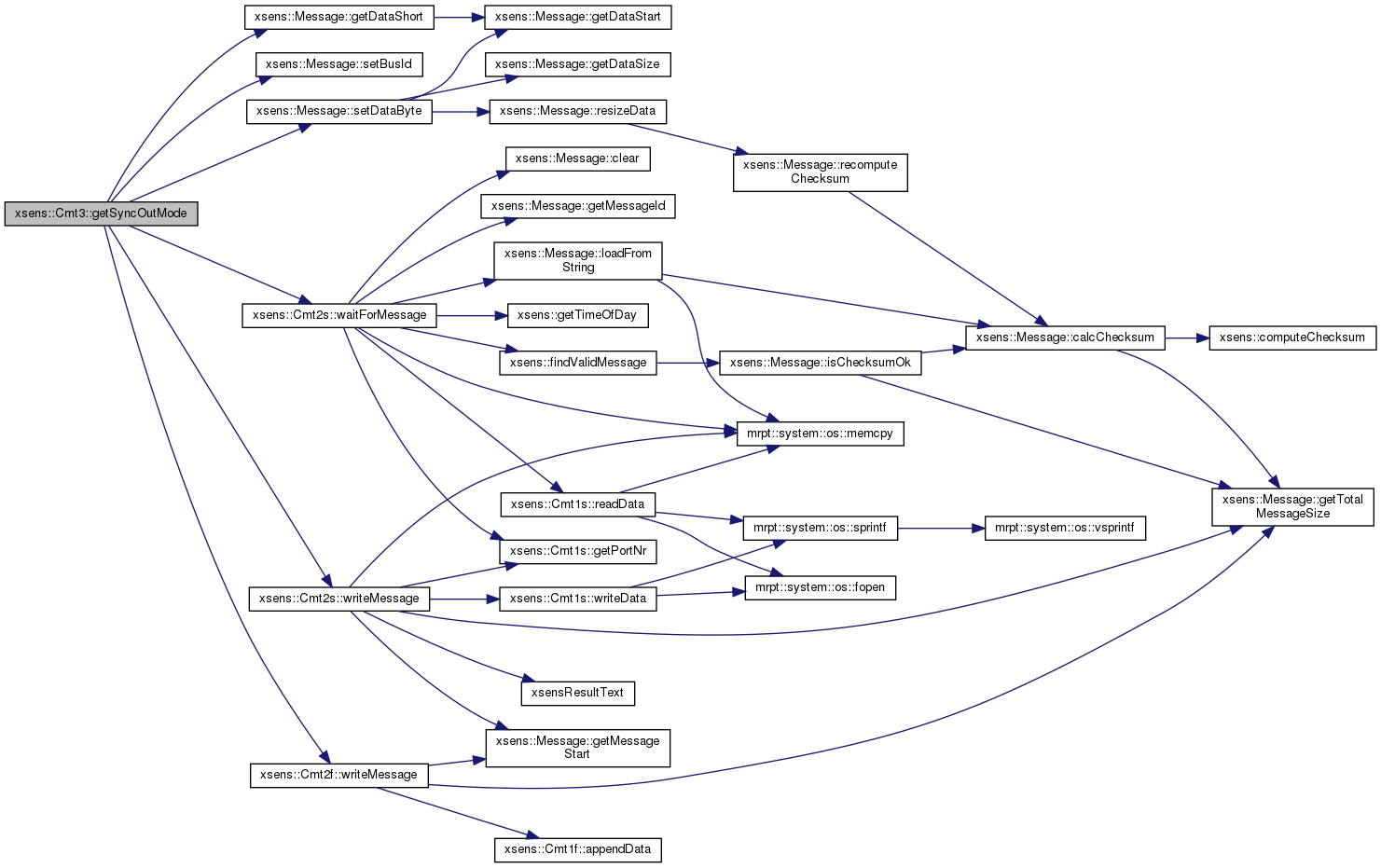
| XsensResultValue | getSyncOutMode (uint16_t &mode) |
| Retrieve the outbound synchronization mode of an MT device. More... | |
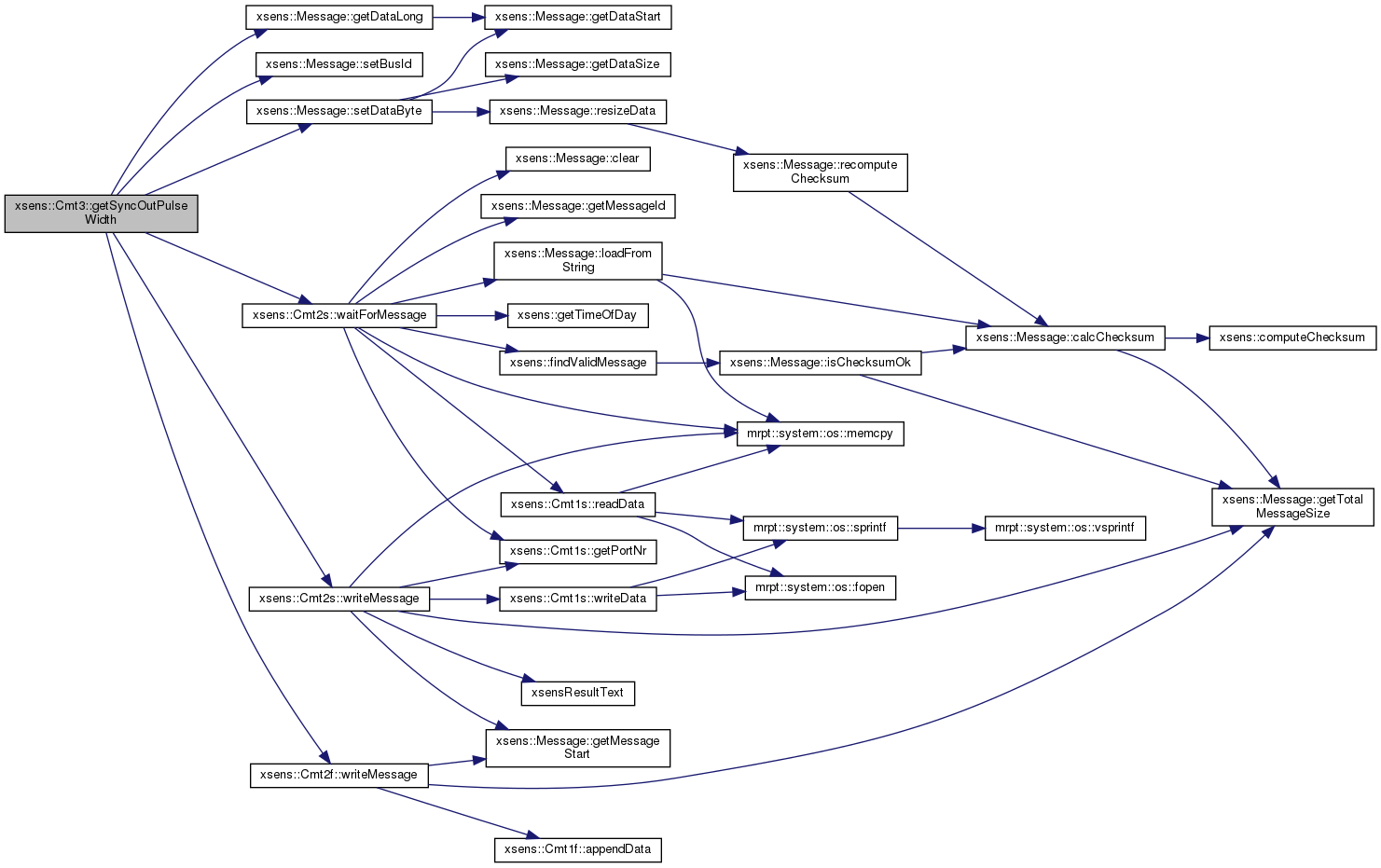
| XsensResultValue | getSyncOutPulseWidth (uint32_t &pulseWidth) |
| Retrieve the outbound synchronization pulse width of an MT device. More... | |
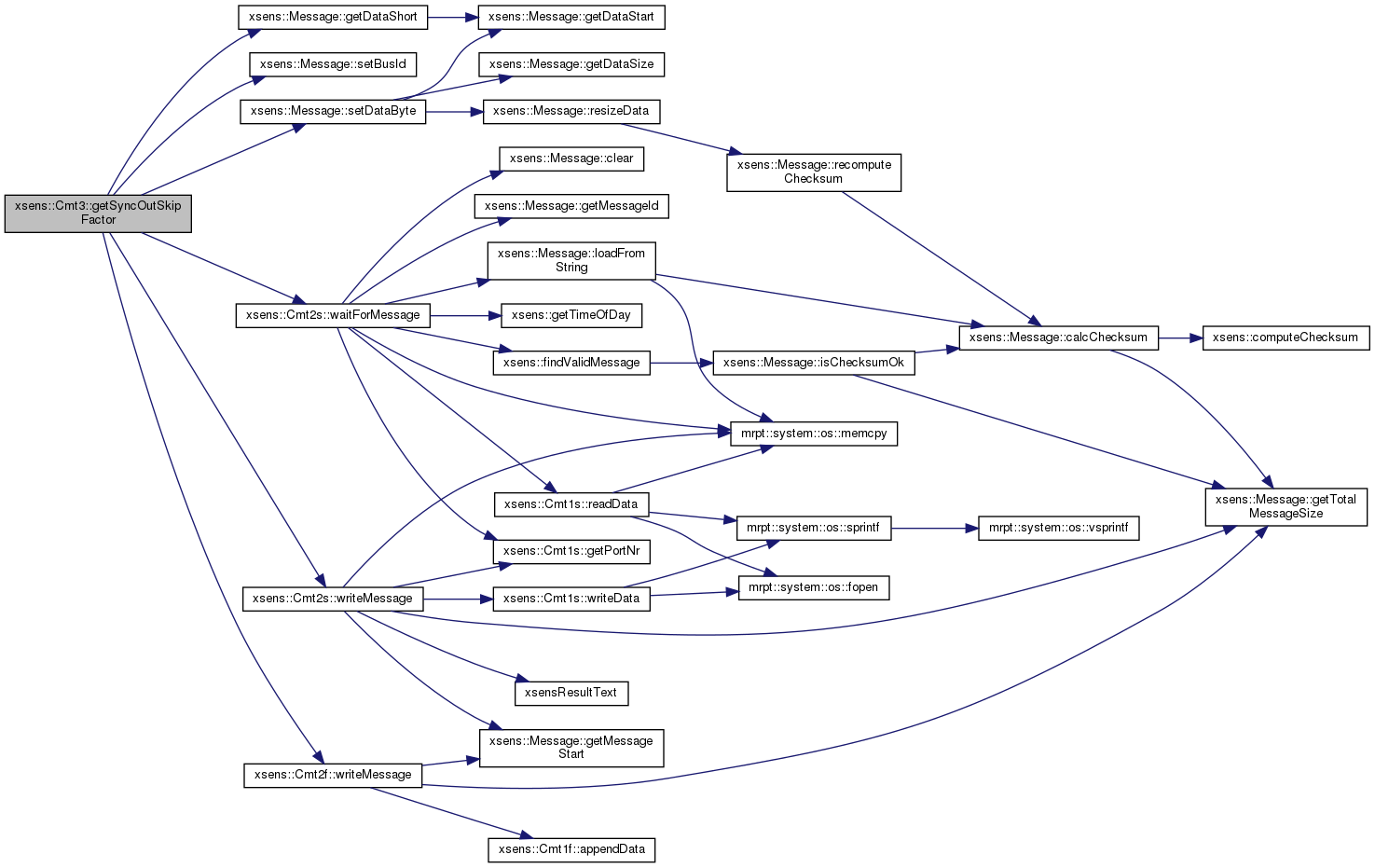
| XsensResultValue | getSyncOutSkipFactor (uint16_t &skipFactor) |
| Retrieve the outbound synchronization skip factor of an MT device. More... | |
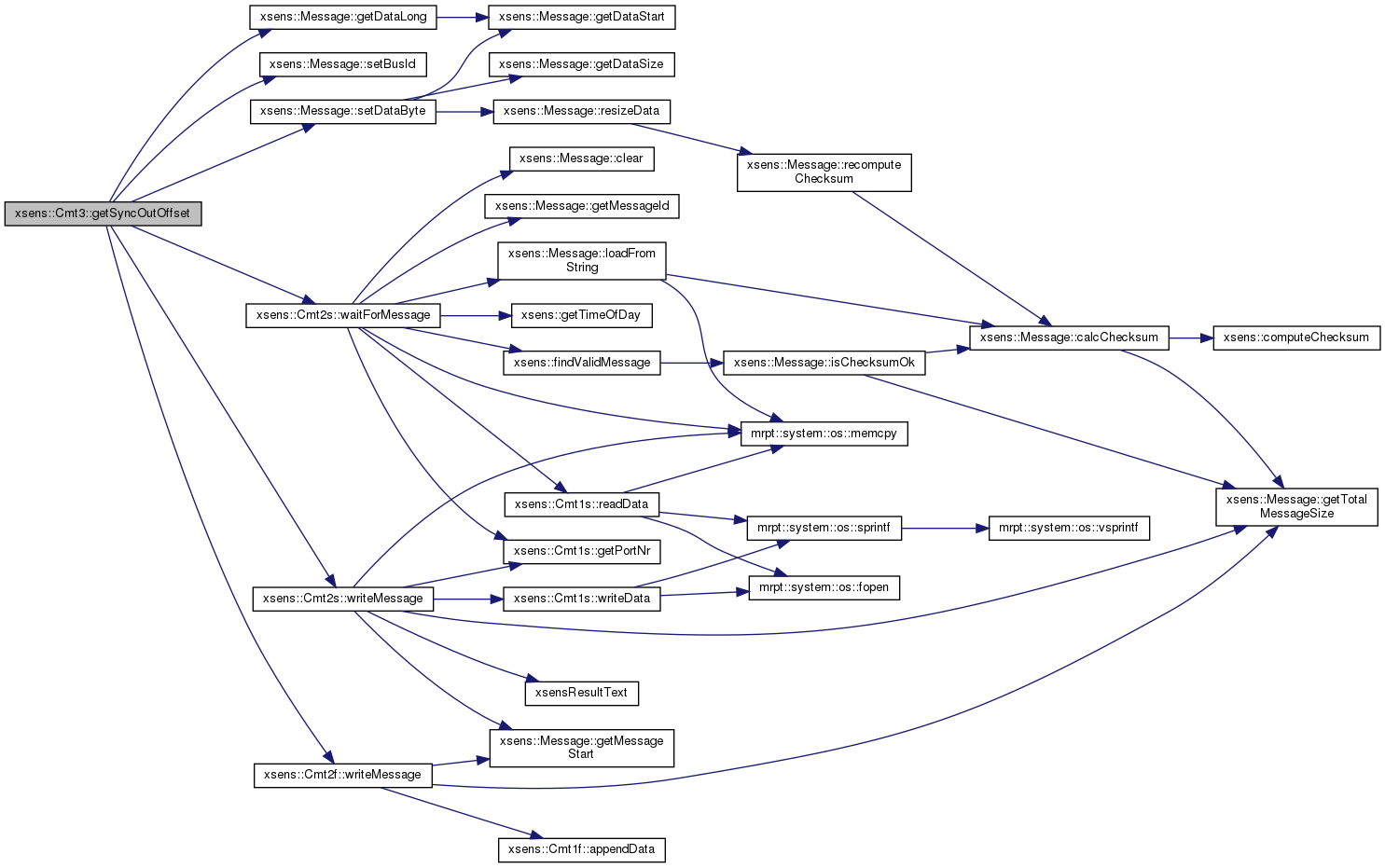
| XsensResultValue | getSyncOutOffset (uint32_t &offset) |
| Retrieve the outbound synchronization offset of an MT device. More... | |
| uint32_t | getTimeoutConfig (void) const |
| Return the configuration mode timeout. More... | |
| uint32_t | getTimeoutMeasurement (void) const |
| Return the measurement mode timeout. More... | |
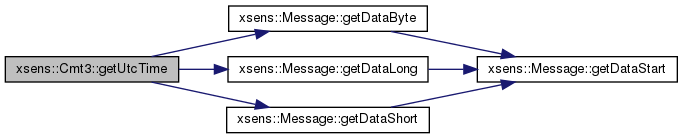
| XsensResultValue | getUtcTime (CmtUtcTime &utc, const CmtDeviceId deviceId) |
| Return the UTC time of the last received sample. More... | |
| XsensResultValue | getXmOutputMode (uint8_t &mode) |
| Return the dual-output mode of the XM. More... | |
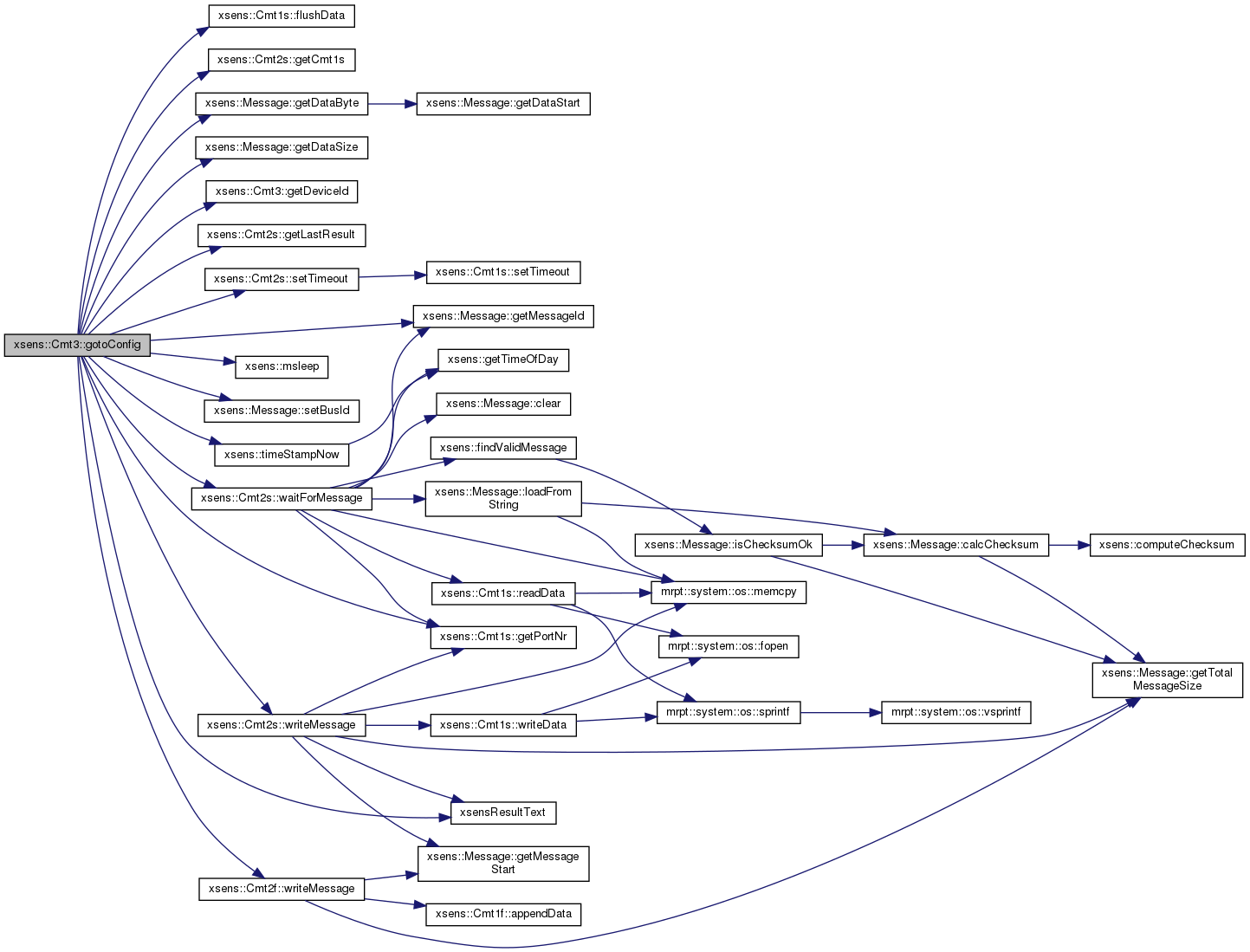
| XsensResultValue | gotoConfig (void) |
| Place all connected devices into Configuration Mode. More... | |
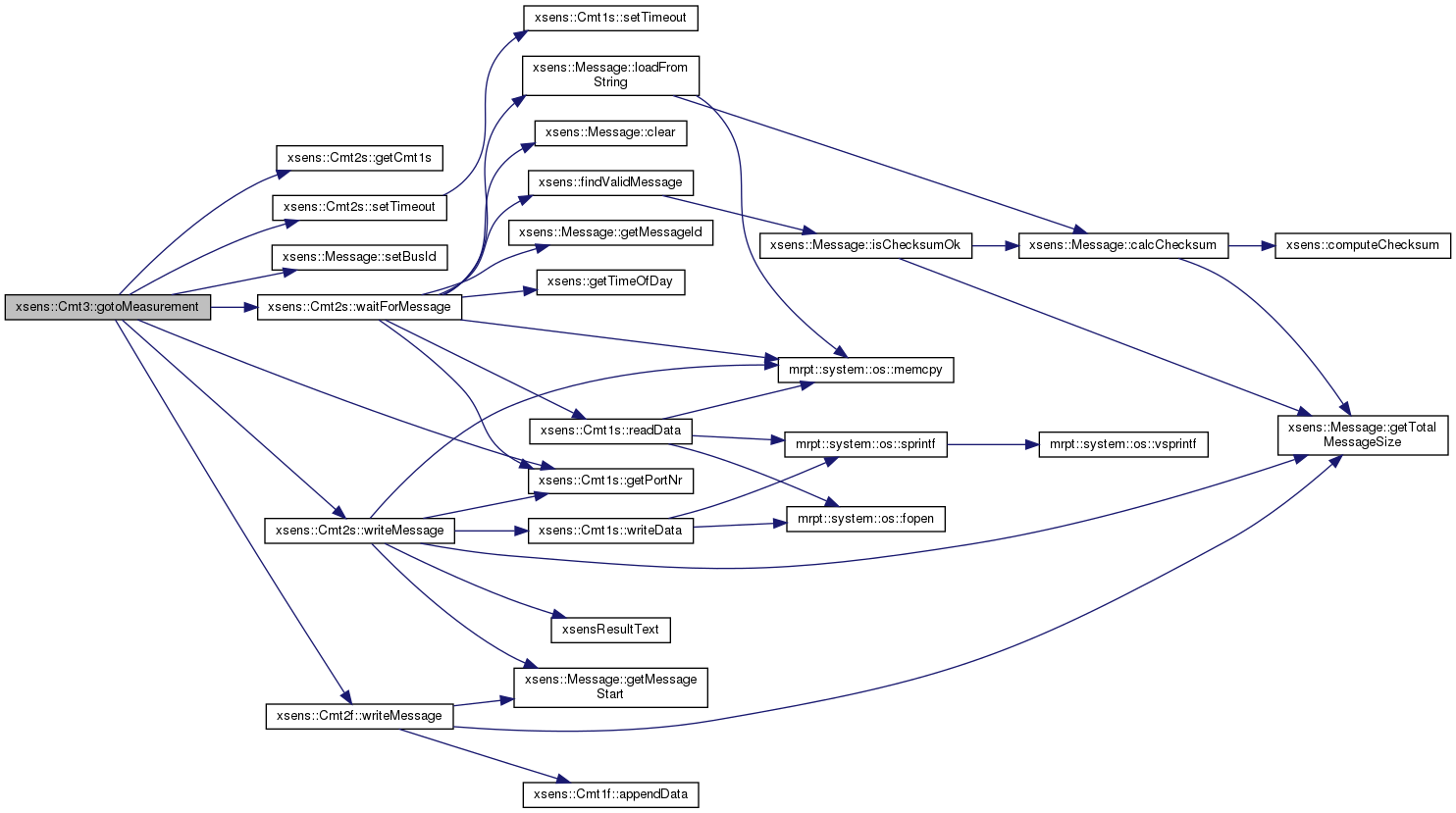
| XsensResultValue | gotoMeasurement (void) |
| Place all connected devices into Measurement Mode. More... | |
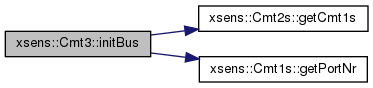
| XsensResultValue | initBus (void) |
| Perform an initBus request. More... | |
| bool | isLogging (void) const |
| Return whether the Cmt3 object is writing to a log file or not. More... | |
| bool | isPortOpen (void) const |
| Return whether the communication port is open or not. More... | |
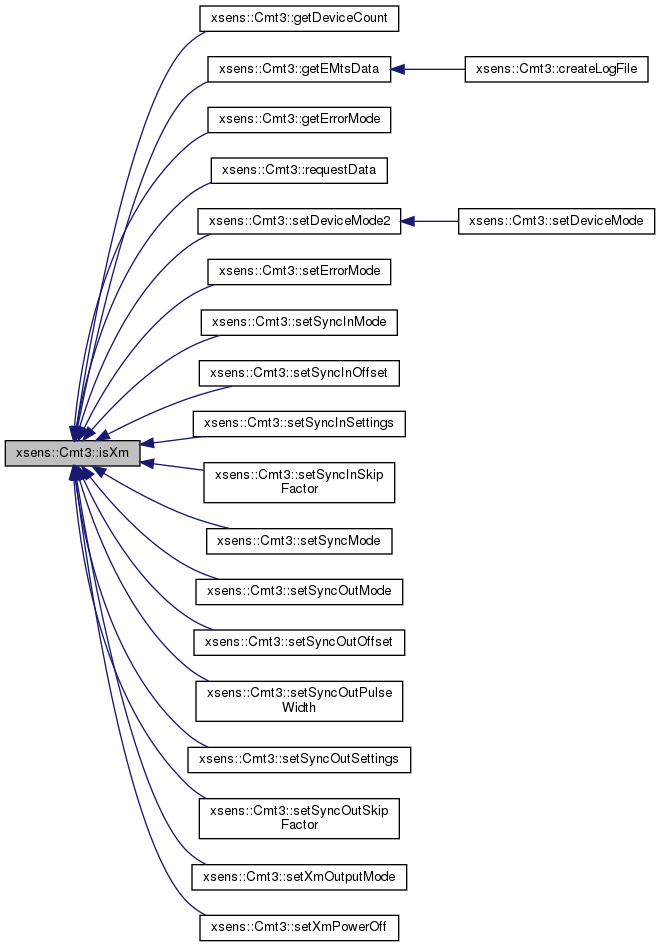
| bool | isXm (void) const |
| Return whether the main device is an Xbus Master or not. More... | |
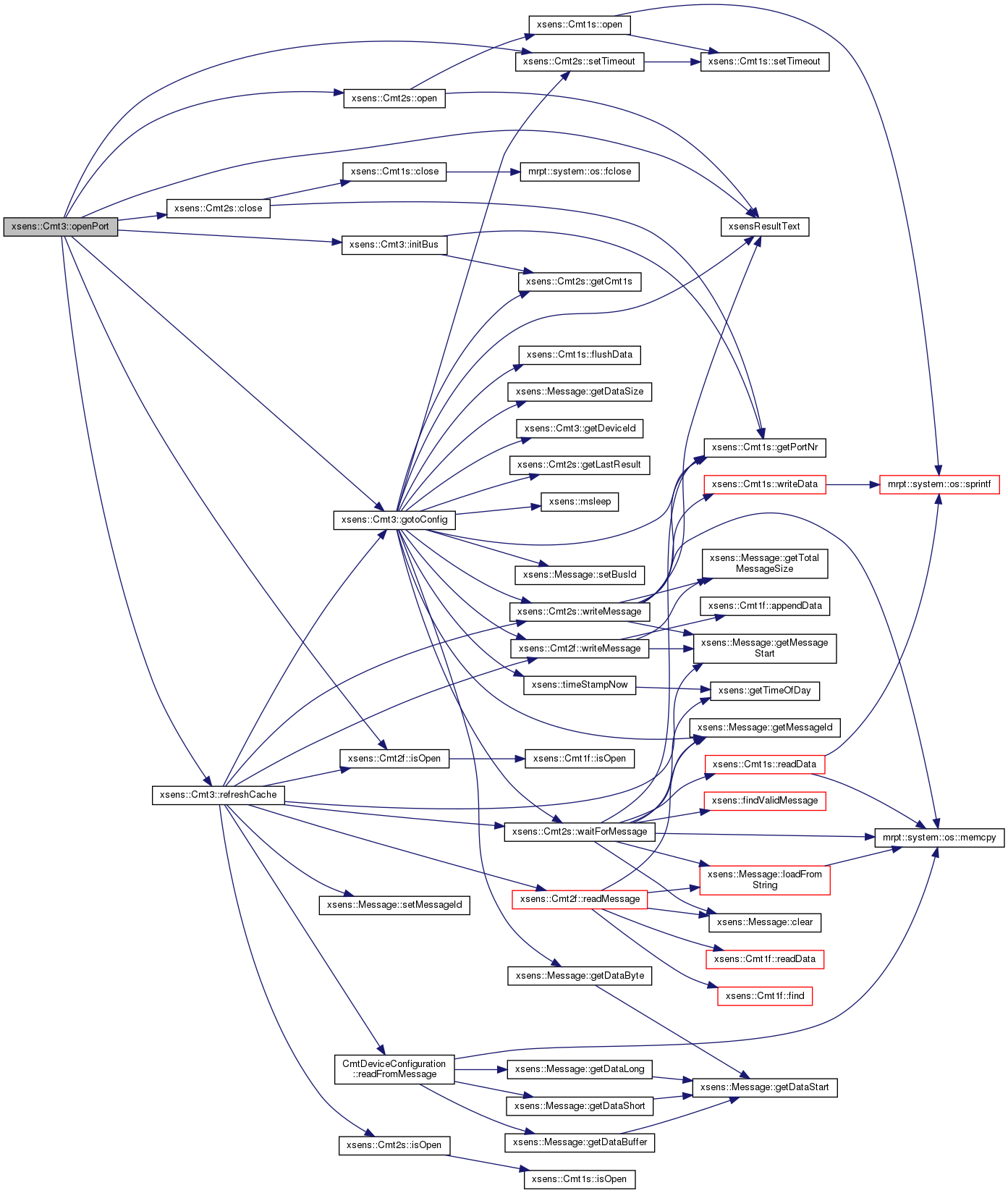
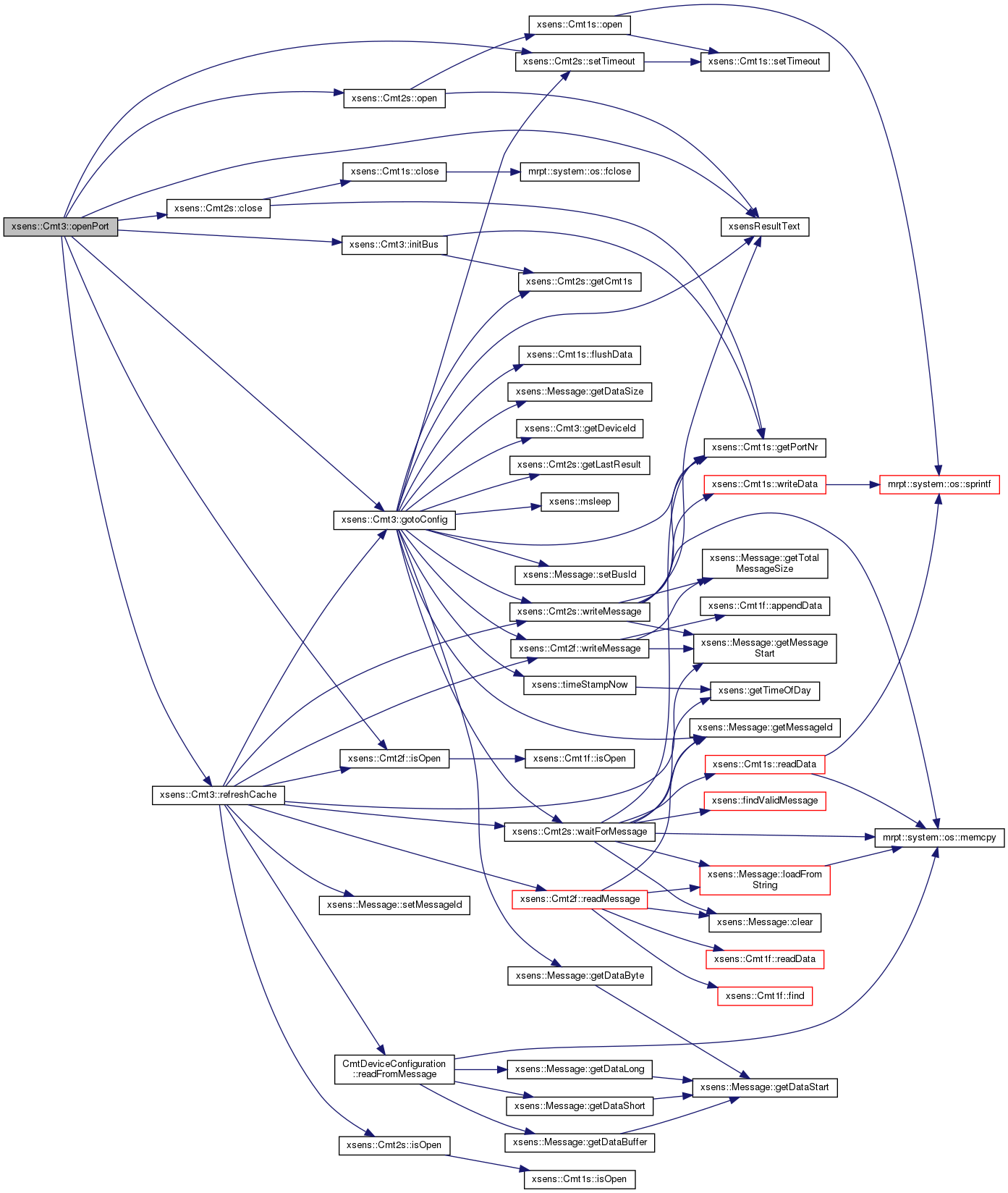
| XsensResultValue | openPort (const char *portName, const uint32_t baudRate=CMT_DEFAULT_BAUD_RATE) |
| XsensResultValue | openPort (const uint32_t portNumber, const uint32_t baudRate=CMT_DEFAULT_BAUD_RATE) |
| Open a communication channel to. More... | |
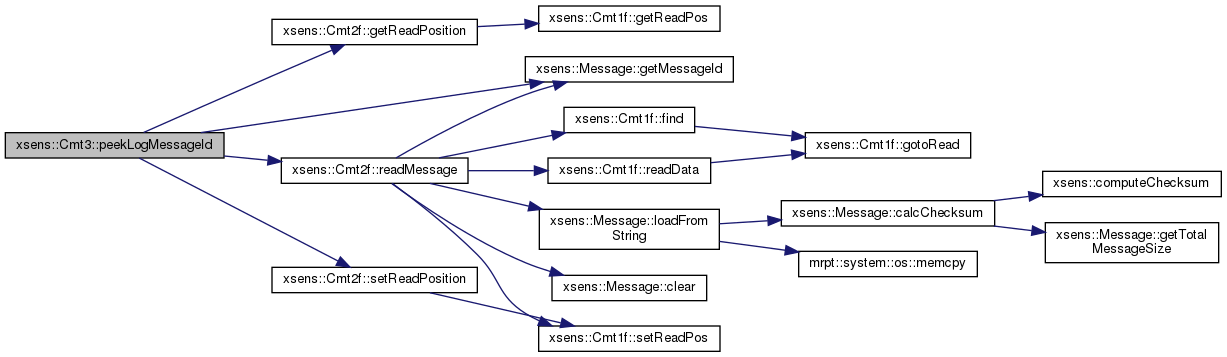
| XsensResultValue | peekLogMessageId (uint8_t &messageId) |
| Open a communication channel to. More... | |
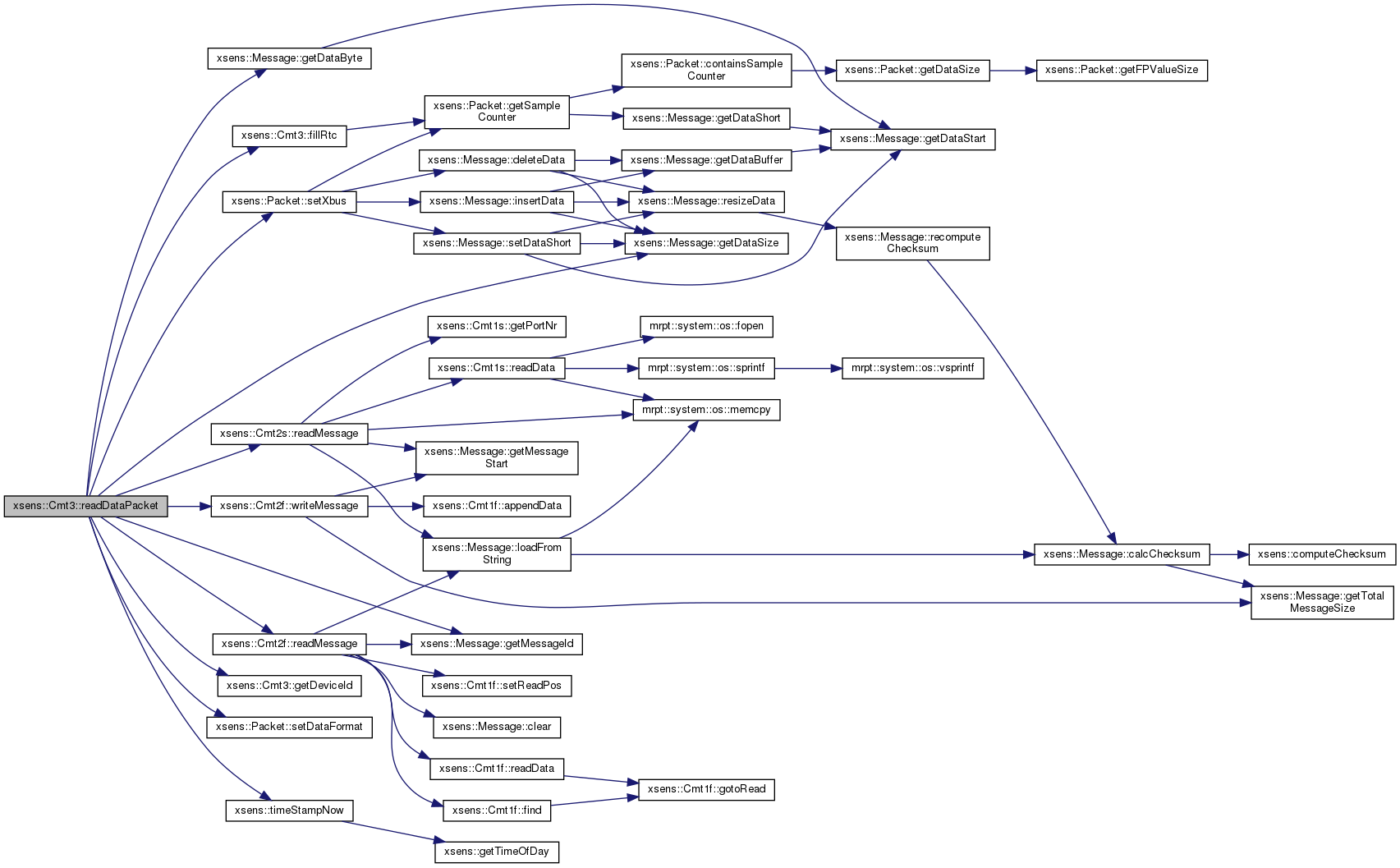
| XsensResultValue | readDataPacket (Packet *pack, bool acceptOther=false) |
| Retrieve a data message. More... | |
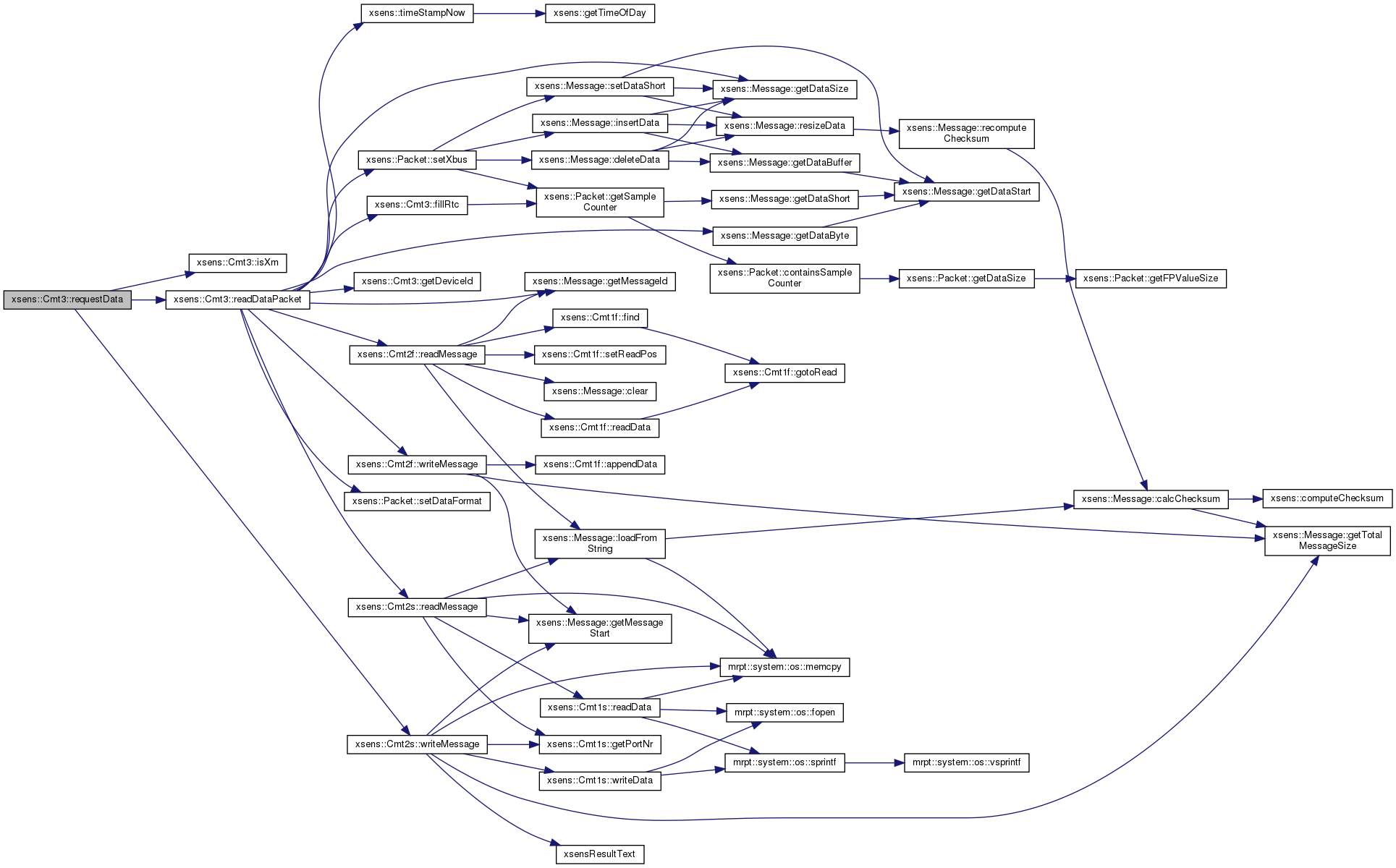
| XsensResultValue | requestData (Packet *pack) |
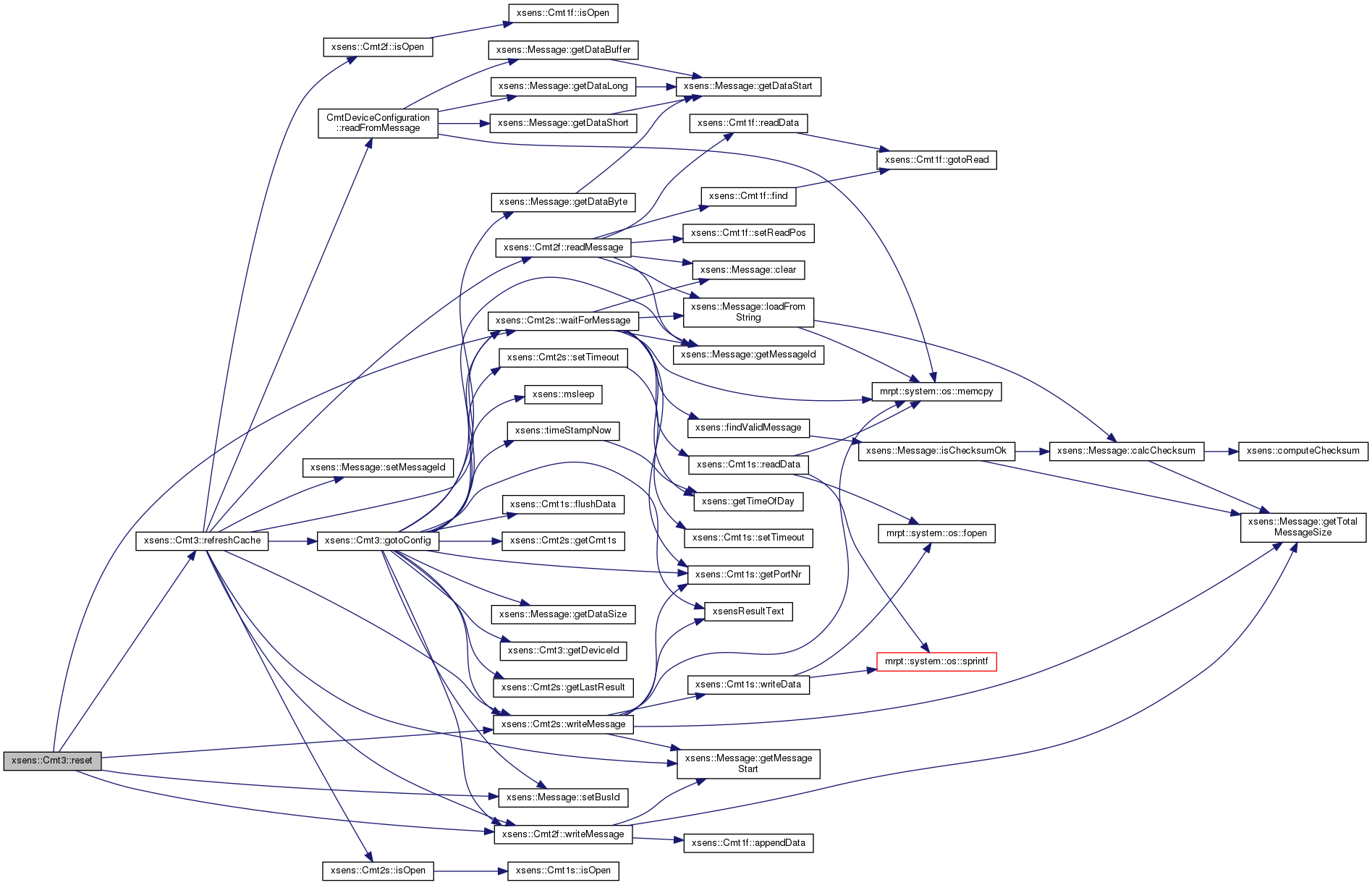
| XsensResultValue | reset (void) |
| Request a data. More... | |
| XsensResultValue | resetOrientation (const CmtResetMethod method, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Perform an orientation reset on a device. More... | |
| XsensResultValue | restoreFactoryDefaults (const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Restore the device to factory default settings. More... | |
| XsensResultValue | setBaudrate (const uint32_t baudrate, bool reconnect=true) |
| Set the baudrate and possibly reconnect. More... | |
| XsensResultValue | setBluetoothState (const bool enabled) |
| Set the Bluetooth state of the Xbus Master. More... | |
| XsensResultValue | setBusPowerState (const bool enabled) |
| Switch the Xbus Master bus power on or off. More... | |
| XsensResultValue | setDeviceMode (const CmtDeviceMode &mode, bool force, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the complete output mode of a device. More... | |
| XsensResultValue | setDeviceMode2 (const CmtDeviceMode2 &mode, bool force, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the complete output mode2 of a device. More... | |
| XsensResultValue | setErrorMode (const uint16_t mode) |
| Set the error mode of the device. More... | |
| XsensResultValue | setGotoConfigTries (const uint16_t tries) |
| Set the number of times the gotoConfig function will attempt a gotoConfig before failing. More... | |
| XsensResultValue | setHeading (const double heading, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the heading offset. More... | |
| XsensResultValue | setLocationId (uint16_t locationId, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the location ID of a sensor. More... | |
| XsensResultValue | setMagneticDeclination (const double declination, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the stored magnetic declination. More... | |
| XsensResultValue | setSyncInSettings (const CmtSyncInSettings &settings) |
| Set the inbound synchronization settings of an MT device. More... | |
| XsensResultValue | setSyncInMode (const uint16_t mode) |
| Set the inbound synchronization mode of an MT device. More... | |
| XsensResultValue | setSyncInSkipFactor (const uint16_t skipFactor) |
| Set the inbound synchronization skip factor of an MT device. More... | |
| XsensResultValue | setSyncInOffset (const uint32_t offset) |
| Set the inbound synchronization offset of an MT device. More... | |
| XsensResultValue | setSyncMode (const uint8_t mode) |
| Set the sync mode of the Xbus Master. More... | |
| XsensResultValue | setSyncOutSettings (const CmtSyncOutSettings &settings) |
| Set the outbound synchronization settings of an MT device. More... | |
| XsensResultValue | setSyncOutMode (const uint16_t mode) |
| Set the outbound synchronization mode of an MT device. More... | |
| XsensResultValue | setSyncOutPulseWidth (const uint32_t pulseWidth) |
| Set the outbound synchronization pulse width of an MT device. More... | |
| XsensResultValue | setSyncOutSkipFactor (const uint16_t skipFactor) |
| Set the outbound synchronization skip factor of an MT device. More... | |
| XsensResultValue | setSyncOutOffset (const uint32_t offset) |
| Set the outbound synchronization offset of an MT device. More... | |
| XsensResultValue | setTimeout (const uint32_t ms) |
| Set the default timeout value to use in blocking operations on the communication port. More... | |
| XsensResultValue | setTimeoutConfig (const uint32_t timeout=CMT3_DEFAULT_TIMEOUT_CONF) |
| Set the configuration mode timeout. More... | |
| XsensResultValue | setTimeoutMeasurement (const uint32_t timeout=CMT3_DEFAULT_TIMEOUT_MEAS) |
| Set the measurement mode timeout. More... | |
| XsensResultValue | setXmOutputMode (const uint8_t mode) |
| Set the dual-output mode of the XM. More... | |
| XsensResultValue | setXmPowerOff (void) |
| Switch the connected Xbus Master. More... | |
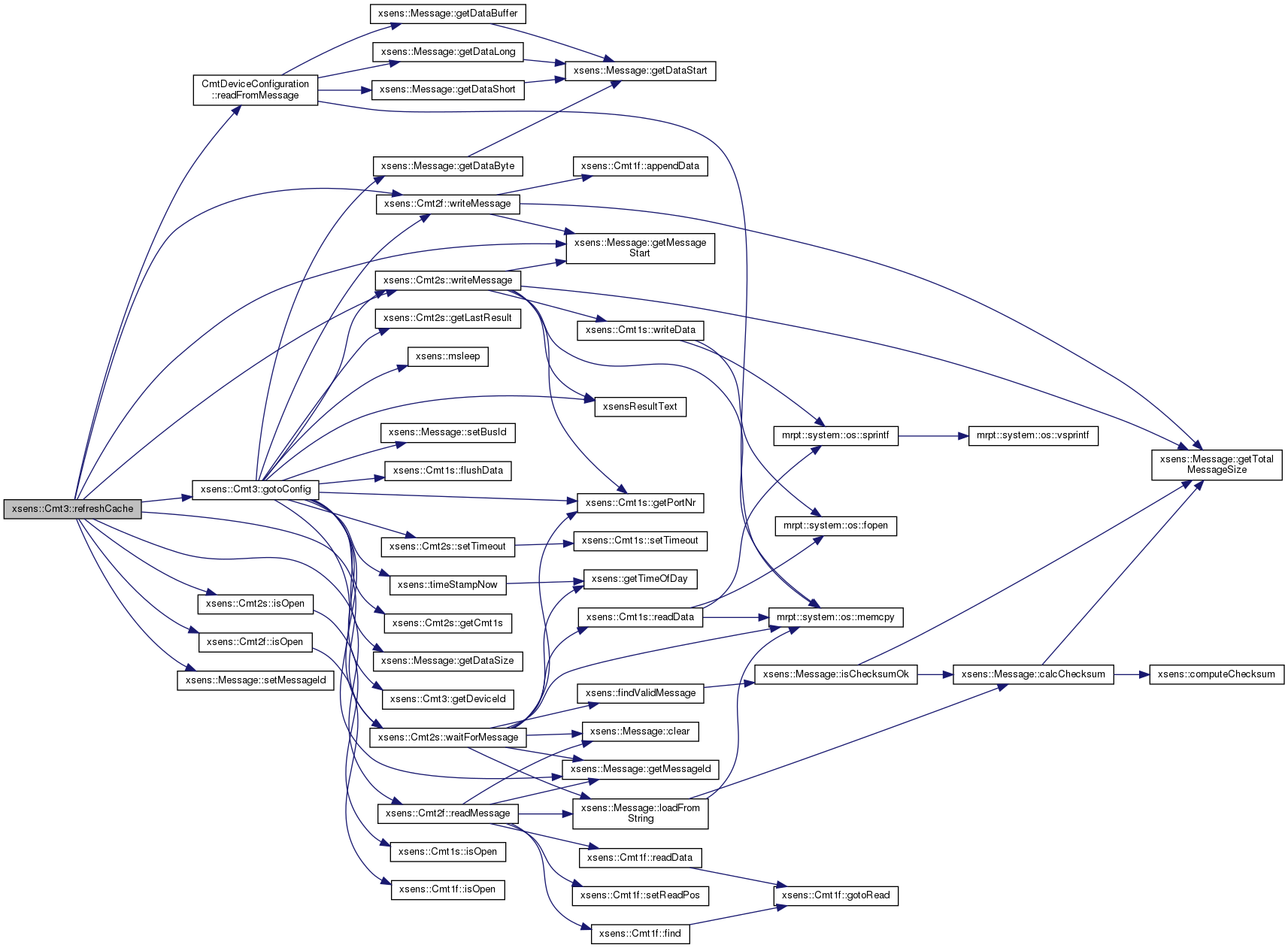
| XsensResultValue | refreshCache (const bool file=false) |
| Update device information stored on host PC. More... | |
| XsensResultValue | waitForDataMessage (Packet *pack) |
| Wait for a data message to arrive. More... | |
| XsensResultValue | createLogFile (const char *filename, bool startLogging=false) |
| Create a log file for incoming messages. More... | |
| XsensResultValue | createLogFile (const wchar_t *filename, bool startLogging=false) |
| Create a log file for incoming messages. More... | |
| XsensResultValue | closeLogFile (bool del=false) |
| Close an open log file. More... | |
| bool | isLogFileOpen (const char *filename) const |
| Return whether or not(true or false) the supplied file is open. More... | |
| bool | isLogFileOpen (const wchar_t *filename) const |
| Return whether or not(true or false) the supplied file is open. More... | |
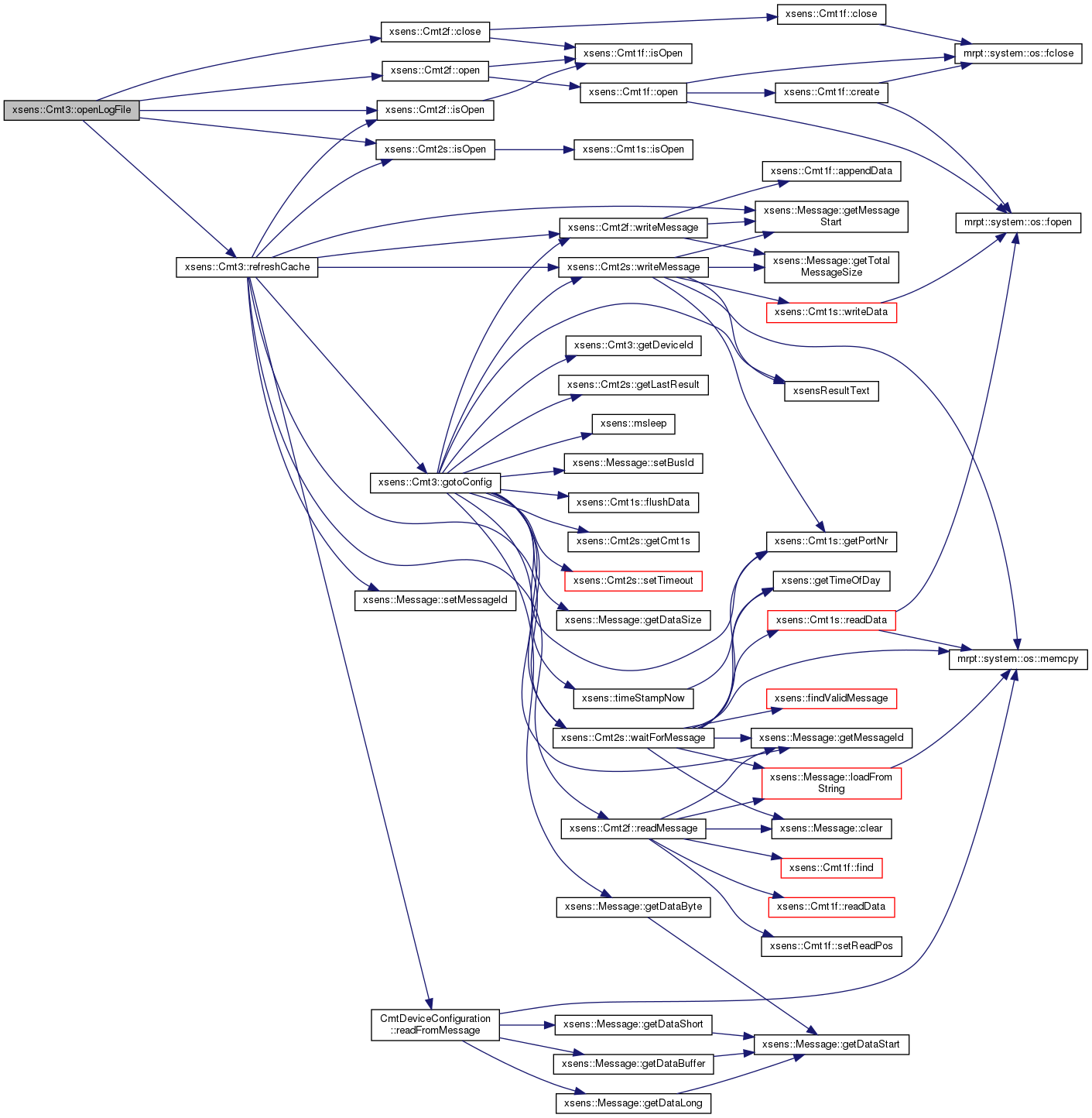
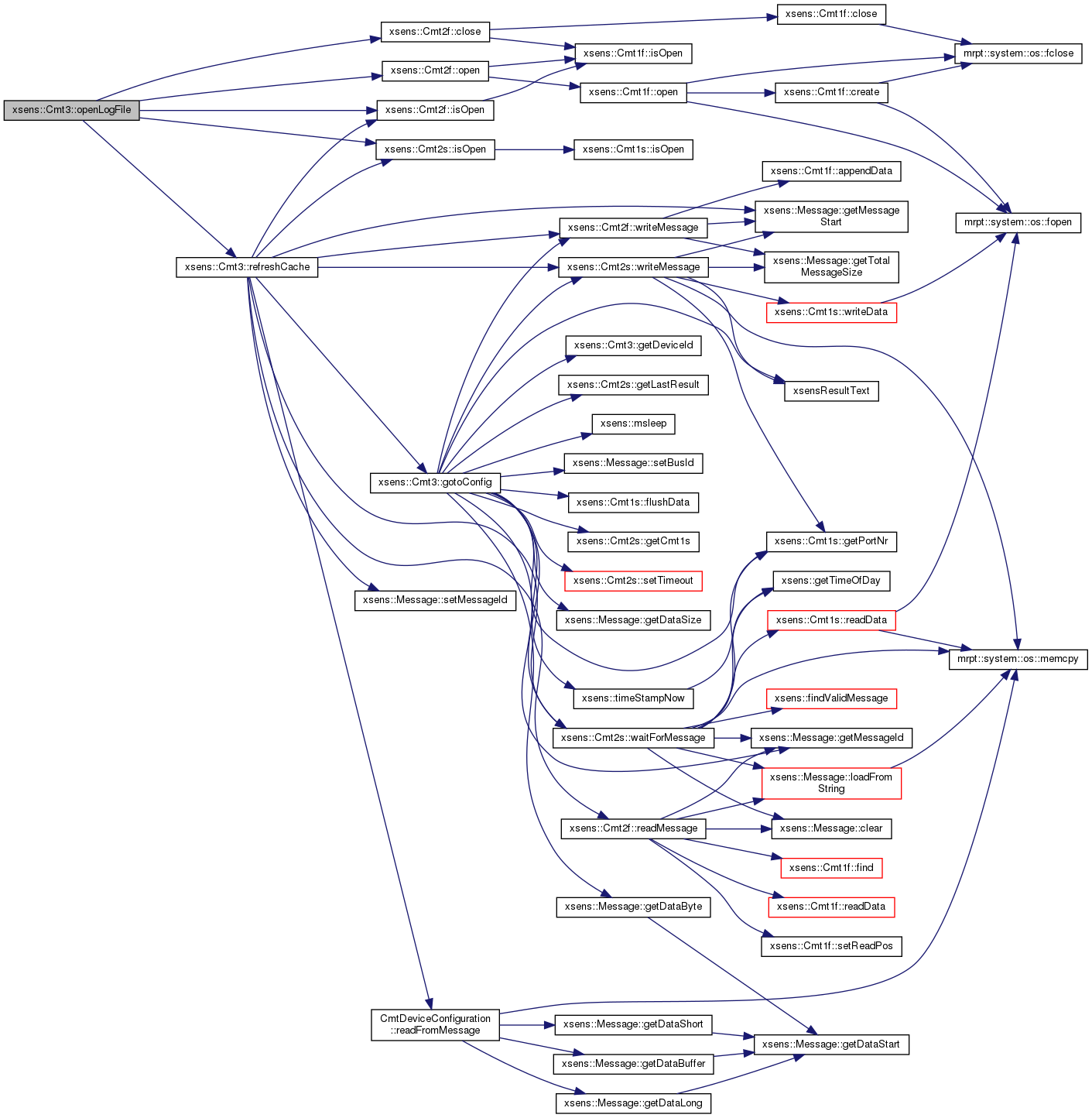
| XsensResultValue | openLogFile (const char *filename) |
| Open a log file for input. More... | |
| XsensResultValue | openLogFile (const wchar_t *filename) |
| Open a log file for input. More... | |
| XsensResultValue | setDataSource (bool readFromFile) |
| Set whether to read from comm port or file. More... | |
| XsensResultValue | setLogMode (bool active) |
| Set the logging mode. More... | |
| XsensResultValue | resetLogFileReadPos (void) |
| Restart reading from the start of the open log file. More... | |
| XsensResultValue | writeMessageToLogFile (const Message &msg) |
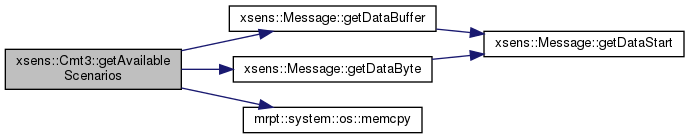
| XsensResultValue | getAvailableScenarios (CmtScenario *scenarios, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Write the specified message to the open. More... | |
| XsensResultValue | getScenario (uint8_t &scenarioType, uint8_t &scenarioVersion, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Get the currently active scenario from a Motion Tracker. More... | |
| XsensResultValue | setScenario (const uint8_t scenarioType, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Specify the scenario to use in the sensor. More... | |
| XsensResultValue | getGravityMagnitude (double &magnitude, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Retrieve the currently used magnitude of the gravity vector. More... | |
| XsensResultValue | setGravityMagnitude (const double magnitude, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the currently used magnitude of the gravity vector. More... | |
| XsensResultValue | getGpsLeverArm (CmtVector &arm, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Get the currently used GPS lever arm. More... | |
| XsensResultValue | getGpsStatus (CmtGpsStatus &status, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Request the status of the GPS satellites in orbit. More... | |
| XsensResultValue | setGpsLeverArm (const CmtVector &arm, const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Set the currently used GPS lever arm. More... | |
| XsensResultValue | storeXkfState (const CmtDeviceId deviceId=CMT_DID_MASTER) |
| Store important components of the XKF filter state to non-volatile memory. More... | |
Public Attributes | |
| bool | m_useRtc |
| Indicates if the RTC should be computed or not (to save CPU time). More... | |
| void * | m_eMtsData [CMT_MAX_DEVICES_PER_PORT] |
| Cached eMTS data. More... | |
Protected Member Functions | |
| Cmt3 (const Cmt3 &ref) | |
| This object cannot be copied, so this function is not implemented. More... | |
| void | fillRtc (Packet *pack) |
| Internal function to compute the RTC value. More... | |
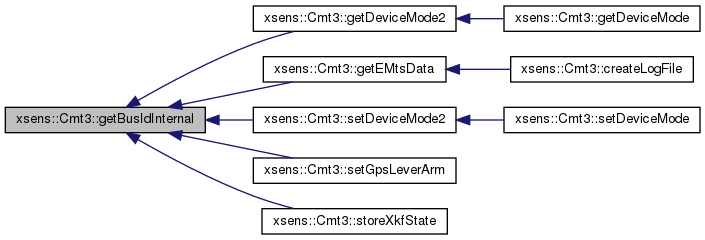
| uint8_t | getBusIdInternal (const CmtDeviceId devId) const |
| Find a device Id in the list and return its busId. More... | |
Protected Attributes | |
| Cmt2s | m_serial |
| The (optional) CMT level 2 serial object that this class operates on. More... | |
| Cmt2f | m_logFile |
| The (optional) CMT level 2 logfile object that this class operates on. More... | |
| double | m_rtcMsPerSample |
| ms per sample = 1000 / sample frequency. More... | |
| uint16_t | m_period |
| The sample period of the port. More... | |
| uint16_t | m_skip |
| The skip factor of the port. More... | |
| TimeStamp | m_rtcStart |
| The start of the RTC counter, the time of arrival of sample 0. More... | |
| uint32_t | m_rtcCount |
| The long sample counter (normal counter wraps at 64k). More... | |
| CmtMtTimeStamp | m_rtcLastSc |
| The last received sample counter, used to determine wrap-around. More... | |
| uint32_t | m_baudrate |
| The baudrate that was last set to be used by the port. More... | |
| uint32_t | m_timeoutConf |
| The config mode timeout. More... | |
| uint32_t | m_timeoutMeas |
| The measurement mode timeout. More... | |
| XsensResultValue | m_lastResult |
| The last result of an operation. More... | |
| uint16_t | m_firstItem |
| The index of the first formatting item. More... | |
| uint16_t | m_gotoConfigTries |
| The number of times a goto config is attempted before the function fails. More... | |
| bool | m_measuring |
| Keeps track of whether the connected device is measuring or being configured. More... | |
| bool | m_detailedScan |
| Automatically scan for device details during open. More... | |
| bool | m_readFromFile |
| Indicates whether to read from the log file or from the serial port. More... | |
| bool | m_rtcInitialized |
| Indicates if the rtc is initialised or not. More... | |
| bool | m_logging |
| Indicates whether to write all received messages to the logfile or not, automatically set to true by createLogFile. More... | |
| XsensResultValue | m_lastHwError |
| Contains the last error reported by hardware. More... | |
| CmtDeviceId | m_lastHwErrorDeviceId |
| Contains the Device ID of the device that caused the last hardware error. More... | |
| CmtDeviceConfiguration | m_config |
| The configuration of the connected devices. More... | |
Constructor & Destructor Documentation
◆ Cmt3() [1/2]
|
protected |
This object cannot be copied, so this function is not implemented.
◆ Cmt3() [2/2]
| xsens::Cmt3::Cmt3 | ( | ) |
Default constructor, initializes all members to their default values.
Definition at line 325 of file cmt3.cpp.
References clearHwError(), CMT3_DEFAULT_TIMEOUT_CONF, CMT3_DEFAULT_TIMEOUT_MEAS, CMT_DEFAULT_PERIOD, CMT_DEFAULT_SKIP, CMT_GOTO_CONFIG_TRIES, m_config, m_eMtsData, m_gotoConfigTries, m_lastResult, m_logging, m_measuring, m_period, m_readFromFile, m_rtcInitialized, m_skip, m_timeoutConf, m_timeoutMeas, m_useRtc, and XRV_OK.

◆ ~Cmt3()
| xsens::Cmt3::~Cmt3 | ( | ) |
Destructor, de-initializes, frees memory allocated for buffers, etc.
Definition at line 347 of file cmt3.cpp.
References xsens::Cmt2s::close(), xsens::Cmt2f::close(), CMT_MAX_DEVICES_PER_PORT, m_eMtsData, m_logFile, and m_serial.
Member Function Documentation
◆ clearHwError()
Reset the hardware error code.
Use this function to reset the hardware error code reported by getHwError.
- See also
- getHwError
Definition at line 248 of file cmt3.h.
References m_lastHwError, m_lastHwErrorDeviceId, and XRV_OK.
Referenced by Cmt3().

◆ closeLogFile()
| XsensResultValue xsens::Cmt3::closeLogFile | ( | bool | del = false | ) |
Close an open log file.
This function closes the logfile if it was open.
- Parameters
-
del When set to true, the file will be deleted after closing if it is not read-only. This is mostly useful for temporary log-files.
Definition at line 2783 of file cmt3.cpp.
References xsens::Cmt2f::close(), xsens::Cmt2f::closeAndDelete(), CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, and XRV_NOFILEOPEN.

◆ closePort()
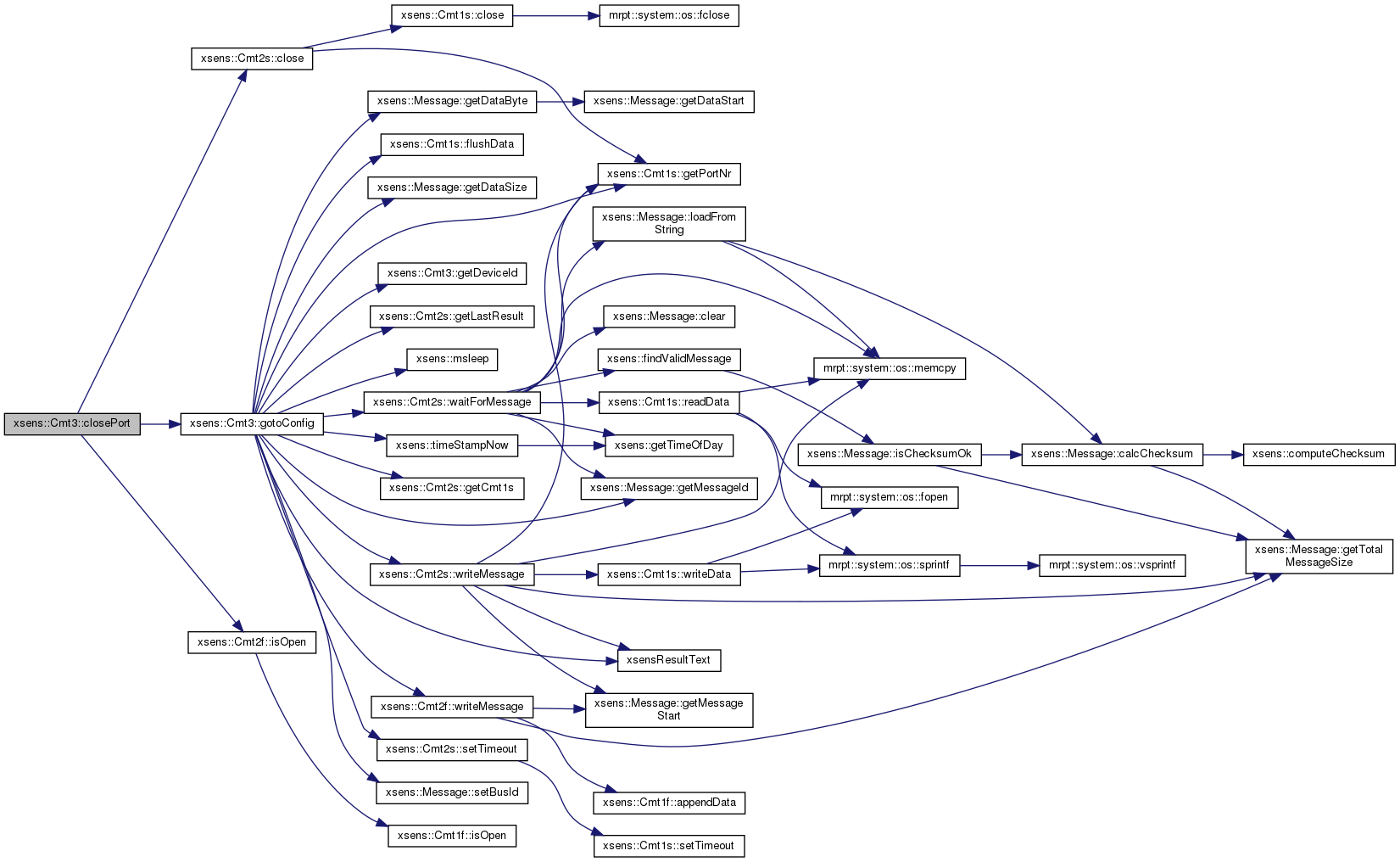
| XsensResultValue xsens::Cmt3::closePort | ( | bool | gotoConfigFirst = true | ) |
Close the communication port.
This function places the device in configuration mode and closes the communication port, ending all further communication with the device.
Definition at line 359 of file cmt3.cpp.
References xsens::Cmt2s::close(), CMT3EXITLOG, CMT3LOG, gotoConfig(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, m_measuring, m_readFromFile, m_serial, and XRV_OK.
Referenced by setBaudrate().

◆ createLogFile() [1/2]
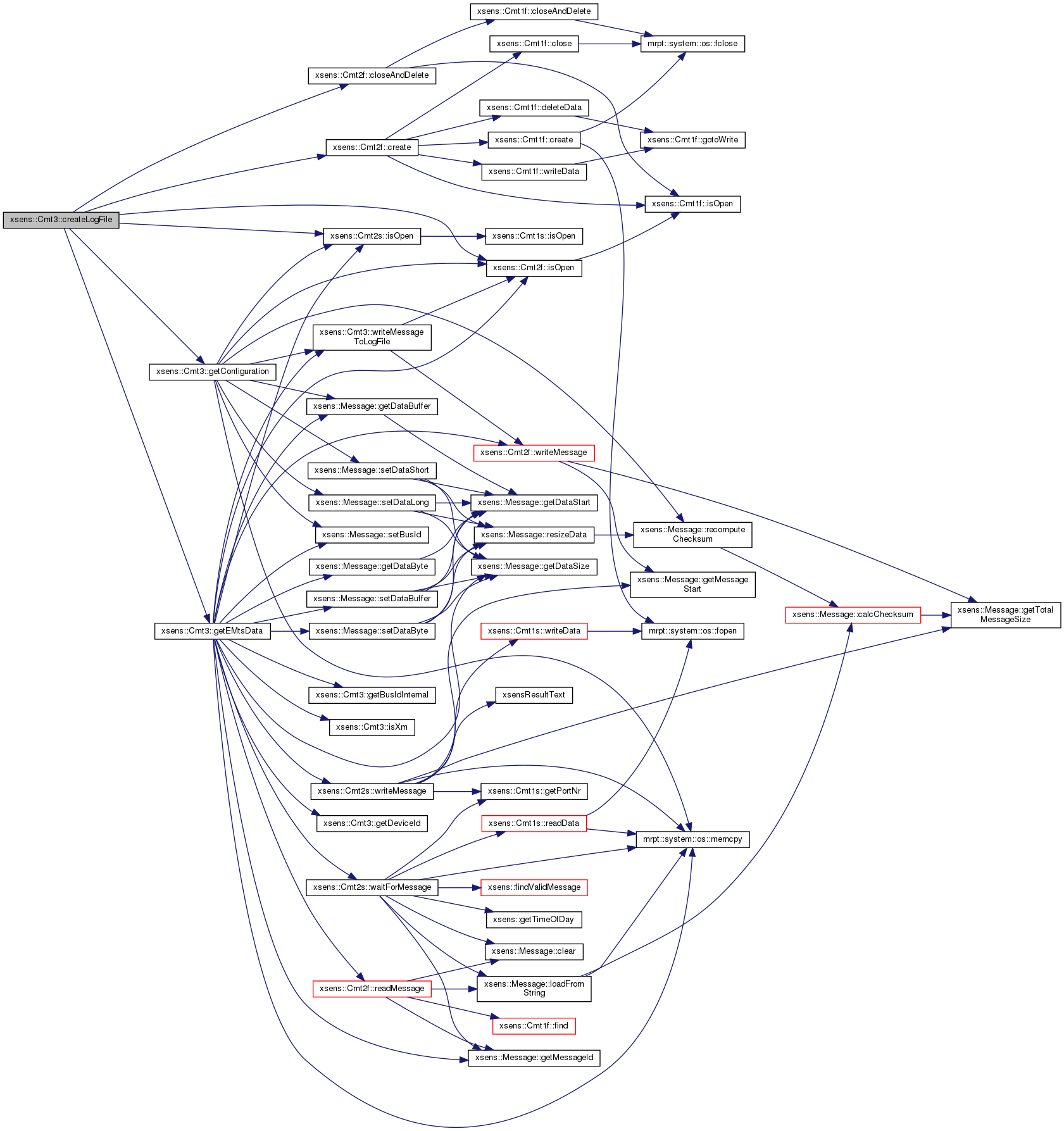
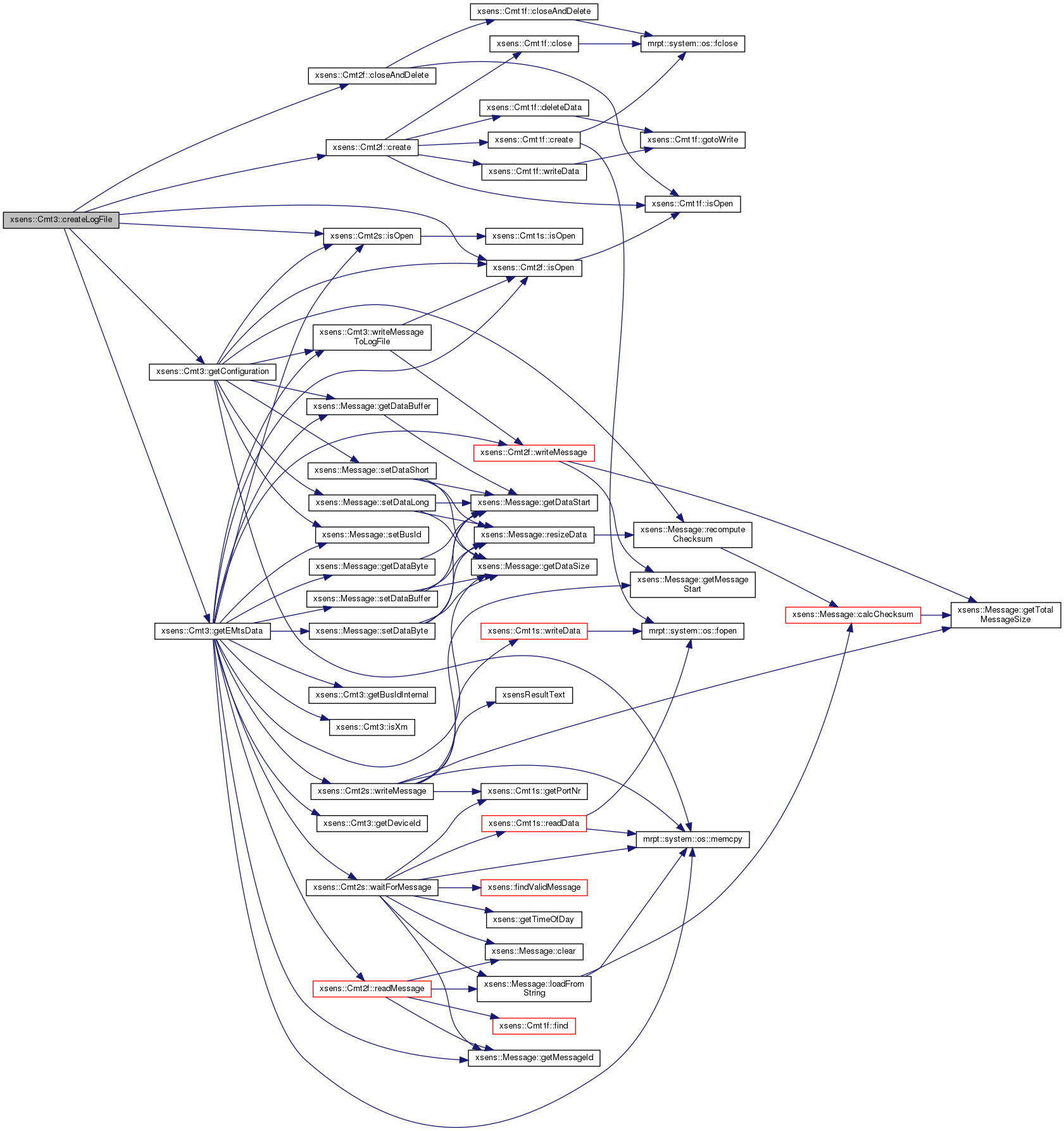
| XsensResultValue xsens::Cmt3::createLogFile | ( | const char * | filename, |
| bool | startLogging = false |
||
| ) |
Create a log file for incoming messages.
This function creates a log file for recording incoming messages. The Cmt3 object must be connected to a communication port or the function will fail.
- Parameters
-
filename The name of the file to use as a log file. A fully qualified (local) path+filename is recommended. startLogging When set to true (default), Cmt3 will immediately start logging incoming messages to the file, otherwise setLogMode must be called first before logging is started.
- Remarks
- If a writable file of the same name already exists in the target location, it will be overwritten without warning.
- Note
- This function is available in configuration AND in measurement mode.
Definition at line 2717 of file cmt3.cpp.
References xsens::Cmt2f::closeAndDelete(), CMT3EXITLOG, CMT3LOG, CMT_DID_BROADCAST, CMT_EMTS_SIZE, xsens::Cmt2f::create(), getConfiguration(), getEMtsData(), xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_numberOfDevices, m_serial, XRV_ALREADYOPEN, XRV_NOPORTOPEN, and XRV_OK.
◆ createLogFile() [2/2]
| XsensResultValue xsens::Cmt3::createLogFile | ( | const wchar_t * | filename, |
| bool | startLogging = false |
||
| ) |
Create a log file for incoming messages.
This function creates a log file for recording incoming messages. The Cmt3 object must be connected to a communication port or the function will fail.
- Parameters
-
filename The name of the file to use as a log file. A fully qualified (local) path+filename is recommended. startLogging When set to true (default), Cmt3 will immediately start logging incoming messages to the file, otherwise setLogMode must be called first before logging is started.
- Remarks
- If a writable file of the same name already exists in the target location, it will be overwritten without warning.
- Note
- This function is available in configuration AND in measurement mode.
Definition at line 2750 of file cmt3.cpp.
References xsens::Cmt2f::closeAndDelete(), CMT3EXITLOG, CMT3LOG, CMT_DID_BROADCAST, CMT_EMTS_SIZE, xsens::Cmt2f::create(), getConfiguration(), getEMtsData(), xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_numberOfDevices, m_serial, XRV_ALREADYOPEN, XRV_NOPORTOPEN, and XRV_OK.
◆ fillRtc()
Internal function to compute the RTC value.
Definition at line 377 of file cmt3.cpp.
References xsens::Packet::getSampleCounter(), m_period, xsens::Packet::m_rtc, m_rtcCount, m_rtcInitialized, m_rtcLastSc, m_rtcMsPerSample, m_rtcStart, m_skip, and xsens::Packet::m_toa.
Referenced by readDataPacket(), and waitForDataMessage().


◆ getAvailableScenarios()
| XsensResultValue xsens::Cmt3::getAvailableScenarios | ( | CmtScenario * | scenarios, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Write the specified message to the open.
log file.
This function can be used to add custom messages to a log file.
- Note
- A typical log file will only contain acknowledge messages, not request messages.
- See also
- createLogFile
Retrieve a list of the available scenarios.
Use this function to retrieve a list of all scenarios available in a Motion Tracker. See the supplied documentation for more information about scenarios.
- Parameters
-
scenarios A buffer for storing the available scenarios. The supplied buffer should be able to contain at least 6 scenarios, but for future devices a larger buffer is advised. Use CMT_MAX_SCENARIOS_IN_MT+1. The list is terminated by a scenario that has type 0.
- Remarks
- The type of any of the returned scenarios can be safely supplied to the setScenario function.
- See also
- getScenario setScenario
- Note
- This function is only available in configuration mode.
Definition at line 2944 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_DID_TYPEH_MASK, CMT_DID_TYPEH_MTI_MTX, CMT_DID_TYPEH_MTIG, CMT_LEN_SCENARIOLABEL, CMT_MAX_SCENARIOS_IN_MT, CMT_MID_REQAVAILABLESCENARIOS, deviceId, DO_DATA_REQUEST, xsens::Message::getDataBuffer(), xsens::Message::getDataByte(), CmtScenario::m_filterType, CmtScenario::m_label, m_lastResult, CmtScenario::m_type, CmtScenario::m_version, mrpt::system::os::memcpy(), and XRV_OK.
◆ getBatteryLevel()
| XsensResultValue xsens::Cmt3::getBatteryLevel | ( | uint8_t & | level | ) |
Get an Xbus Master's battery level.
The battery level is a value between 0 and 255 that indicates the voltage of the batteries. The scale is not linear and the values should not be used as an absolute voltage. The amount of time remaining for measurement given any battery level greatly depends on the type of batteries used, the number of sensors attached to the Xbus Master and the used output options.
Definition at line 420 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQBATLEVEL, DO_DATA_REQUEST_BID, m_lastResult, and XRV_OK.
◆ getBaudrate()
| XsensResultValue xsens::Cmt3::getBaudrate | ( | uint32_t & | baudrate | ) |
Get the baudrate used by a port.
This function returns the baud rate at which the port is currently connected. The function will return an error when no port is connected.
- See also
- getSerialBaudrate setSerialBaudrate setBaudrate
Definition at line 432 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2s::isOpen(), m_baudrate, m_lastResult, m_serial, XRV_NOPORTOPEN, and XRV_OK.

◆ getBluetoothState()
| XsensResultValue xsens::Cmt3::getBluetoothState | ( | bool & | enabled | ) |
Get the state of the bluetooth communication.
This function tells whether the Bluetooth connection of the Xbus Master is on (1) or off (0).
- Note
- This function is only valid in configuration mode.
Definition at line 444 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQBTDISABLE, DO_DATA_REQUEST_BID, m_lastResult, and XRV_OK.
◆ getBusId()
| XsensResultValue xsens::Cmt3::getBusId | ( | uint8_t & | busId, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) | const |
Retrieve the BusId of a device.
The function checks its internal list for a match of deviceId. If it is found, the corresponding BusId is returned in busId. Otherwise, a 0 is placed in busId and XRV_NOTFOUND result is returned.
Definition at line 457 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_DID_MASTER, deviceId, m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, CmtDeviceConfiguration::m_masterDeviceId, CmtDeviceConfiguration::m_numberOfDevices, XRV_NOTFOUND, and XRV_OK.
◆ getBusIdInternal()
|
protected |
Find a device Id in the list and return its busId.
CmtDeviceId 0= busId 0= broadcast. A CMT_BID_INVALID value is also possible and indicates that the devId was not found.
Definition at line 479 of file cmt3.cpp.
References CMT_BID_BROADCAST, CMT_BID_INVALID, CMT_BID_MASTER, CMT_DID_BROADCAST, CMT_DID_MASTER, m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, CmtDeviceConfiguration::m_masterDeviceId, and CmtDeviceConfiguration::m_numberOfDevices.
Referenced by getDeviceMode2(), getEMtsData(), setDeviceMode2(), setGpsLeverArm(), and storeXkfState().
◆ getBusPowerState()
| XsensResultValue xsens::Cmt3::getBusPowerState | ( | bool & | enabled | ) |
Get the state of the Xbus power.
This function tells whether the Xbus of the connected Xbus Master is currently switched on (1) or not (0). When it is switched off, the attached MT devices have no power and communication with them is not possible. Before going to measurement mode, use setBusPowerState to restore power.
- See also
- setBusPowerState
- Note
- This function is only valid in configuration mode.
Definition at line 497 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_BUSPWR, DO_DATA_REQUEST_BID, m_lastResult, and XRV_OK.
◆ getCmt2f()
◆ getCmt2s()
◆ getConfiguration()
| XsensResultValue xsens::Cmt3::getConfiguration | ( | CmtDeviceConfiguration & | configuration | ) |
Get device configuration.
This function retrieves the complete device configuration of a single device.
- Note
- This information is cached by Cmt3, so it is available in measurement mode.
Definition at line 515 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_CONF_BLOCKLEN, CMT_MID_CONFIGURATION, xsens::Message::getDataBuffer(), xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, CmtDeviceConfiguration::_devInfo::m_dataLength, CmtDeviceConfiguration::m_date, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, CmtDeviceConfiguration::m_numberOfDevices, CmtDeviceConfiguration::_devInfo::m_outputMode, CmtDeviceConfiguration::_devInfo::m_outputSettings, CmtDeviceConfiguration::m_outputSkipFactor, CmtDeviceConfiguration::_devInfo::m_reserved, CmtDeviceConfiguration::m_reservedForClient, CmtDeviceConfiguration::m_reservedForHost, CmtDeviceConfiguration::m_samplingPeriod, m_serial, CmtDeviceConfiguration::m_syncinMode, CmtDeviceConfiguration::m_syncinOffset, CmtDeviceConfiguration::m_syncinSkipFactor, CmtDeviceConfiguration::m_time, mrpt::system::os::memcpy(), xsens::Message::recomputeChecksum(), xsens::Message::setBusId(), xsens::Message::setDataLong(), xsens::Message::setDataShort(), writeMessageToLogFile(), XRV_INVALIDOPERATION, and XRV_OK.
Referenced by createLogFile().

◆ getDataLength()
| XsensResultValue xsens::Cmt3::getDataLength | ( | uint32_t & | length, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Retrieve data size.
This function retrieves the number of bytes that are in a data message as sent by the given device.
Definition at line 569 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQDATALENGTH, deviceId, DO_DATA_REQUEST, m_lastResult, and XRV_OK.
◆ getDeviceCount()
Retrieve total device count.
This function retrieves the total number of connected (master + slave) devices or 0 if not connected.
Definition at line 582 of file cmt3.cpp.
References CMT3LOG, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), isXm(), m_config, m_logFile, CmtDeviceConfiguration::m_numberOfDevices, and m_serial.
◆ getDeviceId()
| XsensResultValue xsens::Cmt3::getDeviceId | ( | const uint8_t | busId, |
| CmtDeviceId & | deviceId | ||
| ) | const |
Retrieve the DeviceId of a device given its Bus ID.
This function retrieves the DeviceId for the device with the given Bus ID. When no devices are connected, a 0 ID is supplied.
Definition at line 597 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, deviceId, m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, CmtDeviceConfiguration::m_masterDeviceId, CmtDeviceConfiguration::m_numberOfDevices, XRV_INVALIDID, and XRV_OK.
Referenced by getEMtsData(), gotoConfig(), readDataPacket(), setGpsLeverArm(), storeXkfState(), and waitForDataMessage().

◆ getDeviceMode()
| XsensResultValue xsens::Cmt3::getDeviceMode | ( | CmtDeviceMode & | mode, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return device mode.
This function retrieves the output-related settings of the device, such as the sample rate and output settings.
- See also
- setDeviceMode
- Note
- This function actually reads the device mode from the cached configuration, so it is available in measurement mode.
- See also
- refreshCache
Definition at line 616 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, deviceId, getDeviceMode2(), CmtDeviceMode2::getSampleFrequency(), CmtDeviceMode2::m_outputMode, CmtDeviceMode2::m_outputSettings, and XRV_OK.

◆ getDeviceMode2()
| XsensResultValue xsens::Cmt3::getDeviceMode2 | ( | CmtDeviceMode2 & | mode, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return device mode2.
This function retrieves the output-related settings of the device, such as the period, skip factor and output settings.
- See also
- setDeviceMode
- Note
- This function actually reads the device mode from the cached configuration, so it is available in measurement mode.
- See also
- refreshCache
Definition at line 636 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_INVALID, CMT_BID_MASTER, deviceId, getBusIdInternal(), m_config, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, CmtDeviceConfiguration::_devInfo::m_outputMode, CmtDeviceConfiguration::_devInfo::m_outputSettings, m_period, m_skip, XRV_INVALIDID, and XRV_OK.
Referenced by getDeviceMode().


◆ getEMtsData()
| XsensResultValue xsens::Cmt3::getEMtsData | ( | void * | buffer, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Retrieve the eMts data of the specified sensor(s).
This function can be used to read proprietary data from one or more Motion Trackers. This data is required by higher level functions in combination with Configuration data to convert Raw data into Calibrated and Orientation data. The eMTs data is quite large, but it is cached. The first request should be done in configuration mode, but following requests can be done in measurement mode. When requesting eMTS data for a single sensor, the buffer should be at least CMT_EMTS_SIZE bytes long. When using CMT_DID_BROADCAST, the eMTS data of all connected sensors is placed into the buffer sequentially. In the latter case, the buffer should be able to hold at least sensorcount * CMT_EMTS_SIZE bytes.
Definition at line 658 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_BROADCAST, CMT_BID_INVALID, CMT_BID_MASTER, CMT_EMTS_SIZE, CMT_MID_EMTSDATA, CMT_MID_ERROR, CMT_MID_REQEMTS, deviceId, getBusIdInternal(), xsens::Message::getDataBuffer(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Message::getMessageId(), xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), isXm(), m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_eMtsData, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, CmtDeviceConfiguration::m_numberOfDevices, m_readFromFile, m_serial, mrpt::system::os::memcpy(), xsens::Cmt2f::readMessage(), xsens::Message::setBusId(), xsens::Message::setDataBuffer(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), writeMessageToLogFile(), XRV_INVALIDID, XRV_NOFILEOPEN, XRV_NOPORTOPEN, XRV_NULLPTR, and XRV_OK.
Referenced by createLogFile().

◆ getErrorMode()
| XsensResultValue xsens::Cmt3::getErrorMode | ( | uint16_t & | mode, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return the error mode of the device.
This function returns the error mode of the device. The error mode determines how the device handles errors. See the low-level communication documentation for more details.
- See also
- setErrorMode
- Note
- This function is only valid in configuration mode.
Definition at line 819 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQERRORMODE, CMT_MID_REQXMERRORMODE, deviceId, DO_DATA_REQUEST, DO_DATA_REQUEST_BID, isXm(), m_lastResult, and XRV_OK.

◆ getFirmwareRevision()
| XsensResultValue xsens::Cmt3::getFirmwareRevision | ( | CmtVersion & | revision, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return Firmware revision.
This function retrieves the firmware version that is currently installed in the device.
- Note
- This function is only valid in configuration mode.
Definition at line 889 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQFWREV, deviceId, DO_DATA_REQUEST, xsens::Message::getDataByte(), m_lastResult, CmtVersion::m_major, CmtVersion::m_minor, CmtVersion::m_revision, and XRV_OK.

◆ getGpsLeverArm()
| XsensResultValue xsens::Cmt3::getGpsLeverArm | ( | CmtVector & | arm, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Get the currently used GPS lever arm.
Use this function to retrieve the vector currently used as the GPS lever arm in meters. The GPS lever arm is the relative position of the GPS antenna to the MTi-G unit. The arm is specified in the object coordinate system. See the manual for more information on coordinate systems, alignment resets and the lever arm.
- See also
- setGpsLeverArm
- Note
- This function is only available in configuration mode.
- This function is only available for MTi-G devices.
Definition at line 3025 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQGPSLEVERARM, deviceId, DO_DATA_REQUEST, xsens::Message::getDataFloat(), CmtVector::m_data, m_lastResult, and XRV_OK.

◆ getGpsStatus()
| XsensResultValue xsens::Cmt3::getGpsStatus | ( | CmtGpsStatus & | status, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Request the status of the GPS satellites in orbit.
This function requests the GPS satellite status information from the GPS subsystem. In config mode, this information is requested from the GPS subsystem immediately, which can cause a relatively long delay (250ms) before a reply is received. In measurement mode, the satellite status is regularly polled internally and the latest status is returned immediately when this function is called.
Definition at line 3038 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MAX_SVINFO, CMT_MID_REQGPSSTATUS, deviceId, DO_DATA_REQUEST, xsens::Message::getDataByte(), m_lastResult, status, and XRV_OK.

◆ getGravityMagnitude()
| XsensResultValue xsens::Cmt3::getGravityMagnitude | ( | double & | magnitude, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Retrieve the currently used magnitude of the gravity vector.
The magnitude of the gravity vector is used to determine absolute acceleration from measured acceleration.
- See also
- setGravityMagnitude
- Note
- This function is only available in configuration mode.
Definition at line 3002 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQGRAVITYMAGNITUDE, deviceId, DO_DATA_REQUEST, xsens::Message::getDataFloat(), m_lastResult, and XRV_OK.

◆ getHeading()
| XsensResultValue xsens::Cmt3::getHeading | ( | double & | heading, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return the heading offset.
This function retrieves the heading offset in radians used by the device. The valid range is -pi to +pi. The heading offset is used as a final correction on the output orientation.
- Note
- This function is only valid in configuration mode.
Definition at line 906 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQHEADING, deviceId, DO_DATA_REQUEST, xsens::Message::getDataFloat(), m_lastResult, and XRV_OK.

◆ getHwError()
|
inline |
Return the last Hardware error code.
This function returns the XsensResultValue of the last problem reported by hardware (if any). Hardware problems are all 'error' messages returned by a sensor.
- Parameters
-
did If any problems were found, the responsible device ID will be returned in this parameter.
- See also
- clearHwError
Definition at line 241 of file cmt3.h.
References m_lastHwError, and m_lastHwErrorDeviceId.
◆ getLastResult()
|
inline |
Return the error code of the last user function call.
Definition at line 235 of file cmt3.h.
References m_lastResult.
◆ getLocationId()
| XsensResultValue xsens::Cmt3::getLocationId | ( | uint16_t & | locationId, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return the location ID of a sensor.
This function retrieves the location ID stored in the device.
- See also
- setLocationId
- Note
- This function is only valid in configuration mode.
Definition at line 918 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQLOCATIONID, deviceId, DO_DATA_REQUEST, xsens::Message::getDataShort(), m_lastResult, and XRV_OK.

◆ getLogFileName() [1/2]
| XsensResultValue xsens::Cmt3::getLogFileName | ( | char * | filename | ) |
Retrieve the name of the open log file or an empty string if no logfile is open.
Definition at line 964 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::getName(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, and XRV_NOFILEOPEN.

◆ getLogFileName() [2/2]
| XsensResultValue xsens::Cmt3::getLogFileName | ( | wchar_t * | filename | ) |
Retrieve the name of the open log file or an empty string if no logfile is open.
Definition at line 977 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::getName(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, and XRV_NOFILEOPEN.

◆ getLogFileReadPosition()
| XsensResultValue xsens::Cmt3::getLogFileReadPosition | ( | CmtFilePos & | pos | ) |
Retrieve the read position of the log file.
This function will return the current read position in the open log file in bytes from the start.
- Note
- The read and write positions of log files are completely independent of each other.
- Remarks
- To change the read position, either use resetLogFileReadPos or manipulate the log file through getCmt2f.
- See also
- resetLogFileReadPos getCmt2f
Definition at line 931 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::getReadPosition(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, XRV_NOFILEOPEN, and XRV_OK.

◆ getLogFileSize()
| XsensResultValue xsens::Cmt3::getLogFileSize | ( | CmtFilePos & | size | ) |
Retrieve the size of the open log file in bytes.
Definition at line 947 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::getFileSize(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, XRV_NOFILEOPEN, and XRV_OK.

◆ getMagneticDeclination()
| XsensResultValue xsens::Cmt3::getMagneticDeclination | ( | double & | declination, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return the stored magnetic declination.
This function retrieves the stored local magnetic declination in radians. The valid range is -pi to +pi. The magnetic declination is used in the sensor fusion process to determine the output orientation.
- Note
- This function is only valid in configuration mode.
Definition at line 989 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQMAGNETICDECLINATION, deviceId, DO_DATA_REQUEST, xsens::Message::getDataFloat(), m_lastResult, and XRV_OK.

◆ getMasterId()
| CmtDeviceId xsens::Cmt3::getMasterId | ( | void | ) |
Definition at line 1002 of file cmt3.cpp.
References CMT3LOG, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, m_logFile, CmtDeviceConfiguration::m_masterDeviceId, and m_serial.
Referenced by xsens::cmtScanPort().


◆ getMtCount()
Return the device Id of the first.
device (master).
- Note
- The deviceId is read from the cached configuration data, so it is also available in measurement mode.
Retrieve number of MT devices.
This function will return the number of connected MT devices. Effectively, this returns the device count minus any Xbus Masters.
Definition at line 1013 of file cmt3.cpp.
References CMT3LOGDAT, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, m_logFile, CmtDeviceConfiguration::m_numberOfDevices, and m_serial.

◆ getMtDeviceId()
| XsensResultValue xsens::Cmt3::getMtDeviceId | ( | const uint8_t | index, |
| CmtDeviceId & | deviceId | ||
| ) | const |
Definition at line 1024 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, deviceId, m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, CmtDeviceConfiguration::m_numberOfDevices, XRV_INVALIDPARAM, and XRV_OK.
◆ getPortNr()
| XsensResultValue xsens::Cmt3::getPortNr | ( | uint8_t & | port | ) | const |
Return the device Id of an MT device.
This function returns the ID of the index'th MT (non-Xbus Master) device connected to this object.
- Note
- The deviceId is read from the cached configuration data, so it is also available in measurement mode.
Return the port number that this object is connected to.
If CMT is reading from a log file, an error will be returned.
Definition at line 1038 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2s::getPortNr(), m_lastResult, and m_serial.

◆ getProductCode()
| XsensResultValue xsens::Cmt3::getProductCode | ( | char * | productCode, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Return product code.
This function retrieves the product code of the given device.
- Parameters
-
productCode The buffer that will store the product code. This buffer should be at least 20 bytes.
- Remarks
- The product code is NOT necessarily NULL-terminated. If it is less than 20 characters it will be, but if the product code is 20 characters it won't be. The recommended method is to create a buffer that is 21 bytes long and set the last byte to 0 before calling this function.
- Note
- This function is only valid in configuration mode.
Definition at line 1049 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQPRODUCTCODE, deviceId, DO_DATA_REQUEST, xsens::Message::getDataBuffer(), xsens::Message::getDataSize(), m_lastResult, mrpt::system::os::memcpy(), and XRV_OK.

◆ getSampleFrequency()
Return current sample frequency.
This function determines the sample frequency of the device from the cached sample rate and skip factor and returns it. For devices connected to an Xbus Master, the values used by the Xbus Master are returned.
- See also
- setDeviceMode getDeviceMode
◆ getScenario()
| XsensResultValue xsens::Cmt3::getScenario | ( | uint8_t & | scenarioType, |
| uint8_t & | scenarioVersion, | ||
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Get the currently active scenario from a Motion Tracker.
This function retrieves the scenario currently used by the specified device when outputting orientation and/or position data.
- See also
- getAvailableScenarios setScenario
- Note
- This function is only available in configuration mode.
Definition at line 2979 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQSCENARIO, deviceId, DO_DATA_REQUEST, xsens::Message::getDataByte(), m_lastResult, and XRV_OK.

◆ getSerialBaudrate()
| XsensResultValue xsens::Cmt3::getSerialBaudrate | ( | uint32_t & | baudrate | ) |
Return the baud rate used for serial communication.
This function retrieves the baud rate that is used when the device is connected by a serial connection. In most cases this is the same as getBaudrate, but when an Xbus Master is connected by a Bluetooth connection, it doesn't have to be.
- See also
- setSerialBaudrate setBaudrate getBaudrate
- Note
- This function is only valid in configuration mode.
Definition at line 1078 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BAUD_RATE_115K2, CMT_BAUD_RATE_19K2, CMT_BAUD_RATE_230K4, CMT_BAUD_RATE_38K4, CMT_BAUD_RATE_460K8, CMT_BAUD_RATE_57K6, CMT_BAUD_RATE_921K6, CMT_BAUD_RATE_9600, CMT_BAUDCODE_115K2, CMT_BAUDCODE_19K2, CMT_BAUDCODE_230K4, CMT_BAUDCODE_38K4, CMT_BAUDCODE_460K8, CMT_BAUDCODE_57K6, CMT_BAUDCODE_921K6, CMT_BAUDCODE_9K6, CMT_BID_MASTER, CMT_MID_REQBAUDRATE, DO_DATA_REQUEST_BID, xsens::Message::getDataByte(), m_lastResult, XRV_BAUDRATEINVALID, and XRV_OK.

◆ getSyncInMode()
| XsensResultValue xsens::Cmt3::getSyncInMode | ( | uint16_t & | mode | ) |
Retrieve the inbound synchronization mode of an MT device.
This function retrieves the current inbound synchronization mode of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncInMode setSyncInSettings getSyncInSettings getSyncInSkipFactor setSyncInSkipFactor getSyncInOffset setSyncInOffset getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 1173 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_MODE, xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncInOffset()
| XsensResultValue xsens::Cmt3::getSyncInOffset | ( | uint32_t & | offset | ) |
Retrieve the inbound synchronization offset of an MT device.
This function retrieves the current inbound synchronization offset of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncInOffset setSyncInSettings getSyncInSettings getSyncInSkipFactor setSyncInSkipFactor getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 1221 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_OFFSET, CMT_SYNC_CLOCK_TICKS_TO_NS, xsens::Message::getDataLong(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncInSettings()
| XsensResultValue xsens::Cmt3::getSyncInSettings | ( | CmtSyncInSettings & | settings | ) |
Retrieve the inbound synchronization settings of the master MT device.
This function retrieves the current inbound synchronization settings of the master MT device (sync mode, skip factor and offset). This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- Note
- This function is only valid in configuration mode.
Definition at line 1127 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_MODE, CMT_PARAM_SYNCIN_OFFSET, CMT_PARAM_SYNCIN_SKIPFACTOR, CMT_SYNC_CLOCK_TICKS_TO_NS, xsens::Message::getDataLong(), xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, CmtSyncInSettings::m_mode, CmtSyncInSettings::m_offset, m_serial, CmtSyncInSettings::m_skipFactor, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncInSkipFactor()
| XsensResultValue xsens::Cmt3::getSyncInSkipFactor | ( | uint16_t & | skipFactor | ) |
Retrieve the inbound synchronization skip factor of an MT device.
This function retrieves the current inbound synchronization skip factor of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncInSkipFactor setSyncInSettings getSyncInSettings getSyncInOffset setSyncInOffset getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 1197 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_SKIPFACTOR, xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncMode()
| XsensResultValue xsens::Cmt3::getSyncMode | ( | uint8_t & | mode | ) |
Retrieve the sync mode of the Xbus Master.
This function requests the current synchronization mode used by the specified Xbus Master. This function is not valid for MT devices.
- Note
- This function is only valid in configuration mode.
Definition at line 1248 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCMODE, DO_DATA_REQUEST_BID, xsens::Message::getDataByte(), m_lastResult, and XRV_OK.

◆ getSyncOutMode()
| XsensResultValue xsens::Cmt3::getSyncOutMode | ( | uint16_t & | mode | ) |
Retrieve the outbound synchronization mode of an MT device.
This function retrieves the current outbound synchronization mode of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncOutMode setSyncOutSettings getSyncOutSettings getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutSkipFactor setSyncOutSkipFactor getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 1317 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_MODE, xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncOutOffset()
| XsensResultValue xsens::Cmt3::getSyncOutOffset | ( | uint32_t & | offset | ) |
Retrieve the outbound synchronization offset of an MT device.
This function retrieves the current outbound synchronization offset of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncOutOffset setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutSkipFactor setSyncOutSkipFactor getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 1393 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_OFFSET, CMT_SYNC_CLOCK_TICKS_TO_NS, xsens::Message::getDataLong(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncOutPulseWidth()
| XsensResultValue xsens::Cmt3::getSyncOutPulseWidth | ( | uint32_t & | pulseWidth | ) |
Retrieve the outbound synchronization pulse width of an MT device.
This function retrieves the current outbound synchronization pulse width of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncOutPulseWidth setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutSkipFactor setSyncOutSkipFactor getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 1341 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_PULSEWIDTH, CMT_SYNC_CLOCK_TICKS_TO_NS, xsens::Message::getDataLong(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncOutSettings()
| XsensResultValue xsens::Cmt3::getSyncOutSettings | ( | CmtSyncOutSettings & | settings | ) |
Retrieve the outbound synchronization settings of the master MT device.
This function retrieves the current outbound synchronization settings of the MT device (sync mode, skip factor, offset and pulse width). This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- Note
- This function is only valid in configuration mode.
Definition at line 1260 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_MODE, CMT_PARAM_SYNCOUT_OFFSET, CMT_PARAM_SYNCOUT_PULSEWIDTH, CMT_PARAM_SYNCOUT_SKIPFACTOR, CMT_SYNC_CLOCK_TICKS_TO_NS, xsens::Message::getDataLong(), xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, CmtSyncOutSettings::m_mode, CmtSyncOutSettings::m_offset, CmtSyncOutSettings::m_pulseWidth, m_serial, CmtSyncOutSettings::m_skipFactor, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getSyncOutSkipFactor()
| XsensResultValue xsens::Cmt3::getSyncOutSkipFactor | ( | uint16_t & | skipFactor | ) |
Retrieve the outbound synchronization skip factor of an MT device.
This function retrieves the current outbound synchronization skip factor of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- stSyncOutSkipFactor setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 1369 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_SKIPFACTOR, xsens::Message::getDataShort(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ getTimeoutConfig()
Return the configuration mode timeout.
When in config mode, the system uses a different message timeout than in measurement mode, since configuration messages can take longer to process than measurement mode messages. This function can be used to determine the current config mode timeout in ms.
Definition at line 1419 of file cmt3.cpp.
References m_timeoutConf.
◆ getTimeoutMeasurement()
Return the measurement mode timeout.
When in measurement mode, the system uses a different message timeout than in config mode, since measurement mode messages should be faster to process than config mode messages. This function can be used to determine the current measurement mode timeout in ms.
Definition at line 1421 of file cmt3.cpp.
References m_timeoutMeas.
◆ getUtcTime()
| XsensResultValue xsens::Cmt3::getUtcTime | ( | CmtUtcTime & | utc, |
| const CmtDeviceId | deviceId | ||
| ) |
Return the UTC time of the last received sample.
This function is only valid for MTi-G sensors. In measurement mode it will retrieve the UTC time of the last received sample. In Config mode, it will retrieve the most recent UTC time. In config mode, the time returned will be requested diectly from the GPS subsystem, with several layers of messaging between the original source and the host. In measurement mode, the UTC time is requested from the GPS subsystem periodically and estimated (with a very high precision) for the remaining samples. So in config mode, the time will probably jitter more than in measurement mode.
Definition at line 1424 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_REQUTCTIME, deviceId, DO_DATA_REQUEST, xsens::Message::getDataByte(), xsens::Message::getDataLong(), xsens::Message::getDataShort(), CmtUtcTime::m_day, CmtUtcTime::m_hour, m_lastResult, CmtUtcTime::m_minute, CmtUtcTime::m_month, CmtUtcTime::m_nano, CmtUtcTime::m_second, CmtUtcTime::m_valid, CmtUtcTime::m_year, and XRV_OK.
◆ getXmOutputMode()
| XsensResultValue xsens::Cmt3::getXmOutputMode | ( | uint8_t & | mode | ) |
Return the dual-output mode of the XM.
This function retrieves the dual mode output mode of the Xbus Master. The dual output mode of the Xbus Master defines whether it will send data on the serial connection (at the same baud rate as the bluetooth connection) when it is connected via Bluetooth. When set to 0, the serial communication is disabled, data is sent over the serial bus.
- Note
- When dual-mode is enabled, the Xbus Master will NOT receive command messages on the serial bus.
- See also
- setXmOutputMode
Definition at line 1448 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQOPMODE, DO_DATA_REQUEST_BID, xsens::Message::getDataByte(), m_lastResult, and XRV_OK.

◆ gotoConfig()
| XsensResultValue xsens::Cmt3::gotoConfig | ( | void | ) |
Place all connected devices into Configuration Mode.
This function places the sensors in configuration mode.
- Note
- This function has no effect when reading from a log file
Definition at line 1460 of file cmt3.cpp.
References CMT3_CONFIG_TIMEOUT, CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_DID_MASTER, CMT_MID_ERROR, CMT_MID_GOTOCONFIG, CMT_MID_GOTOCONFIGACK, xsens::Cmt1s::flushData(), xsens::Cmt2s::getCmt1s(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Cmt2s::getLastResult(), xsens::Message::getMessageId(), xsens::Cmt1s::getPortNr(), m_gotoConfigTries, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, m_measuring, m_serial, m_timeoutConf, xsens::msleep(), xsens::Message::setBusId(), xsens::Cmt2s::setTimeout(), xsens::timeStampNow(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_OK, XRV_TIMEOUTNODATA, and xsensResultText().
Referenced by closePort(), openPort(), and refreshCache().

◆ gotoMeasurement()
| XsensResultValue xsens::Cmt3::gotoMeasurement | ( | void | ) |
Place all connected devices into Measurement Mode.
This function places the sensors in measurement mode.
- Note
- This function has no effect when reading from a log file
Definition at line 1520 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_GOTOMEASUREMENT, CMT_MID_GOTOMEASUREMENTACK, xsens::Cmt2s::getCmt1s(), xsens::Cmt1s::getPortNr(), HANDLE_ERR_RESULT, m_lastResult, m_logFile, m_logging, m_measuring, m_rtcInitialized, m_serial, m_timeoutMeas, xsens::Message::setBusId(), xsens::Cmt2s::setTimeout(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
Referenced by setBaudrate().

◆ initBus()
| XsensResultValue xsens::Cmt3::initBus | ( | void | ) |
Perform an initBus request.
See the low-level documentation for more information on the InitBus message.
- See also
- refreshCache setBusPowerState
Definition at line 1545 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_INITBUS, DO_DATA_REQUEST_BID, xsens::Cmt2s::getCmt1s(), xsens::Cmt1s::getPortNr(), m_lastResult, m_serial, and XRV_OK.
Referenced by openPort().

◆ isLogFileOpen() [1/2]
| bool xsens::Cmt3::isLogFileOpen | ( | const char * | filename | ) | const |
Return whether or not(true or false) the supplied file is open.
When the filename parameter is nullptr or empty "", the function will simply return whether a log file is open. Otherwise, the supplied name will be checked against the name of the open log file as well.
- Returns
- true if the log file is open, false if it isn't
Definition at line 2797 of file cmt3.cpp.
References mrpt::system::os::_strnicmp(), CMT3LOG, CMT_MAX_FILENAME_LENGTH, xsens::Cmt2f::getName(), xsens::Cmt2f::isOpen(), and m_logFile.

◆ isLogFileOpen() [2/2]
| bool xsens::Cmt3::isLogFileOpen | ( | const wchar_t * | filename | ) | const |
Return whether or not(true or false) the supplied file is open.
When the filename parameter is nullptr or empty "", the function will simply return whether a log file is open. Otherwise, the supplied name will be checked against the name of the open log file as well.
- Returns
- true if the log file is open, false if it isn't
Definition at line 2816 of file cmt3.cpp.
References CMT3LOG, CMT_MAX_FILENAME_LENGTH, xsens::Cmt2f::getName(), xsens::Cmt2f::isOpen(), and m_logFile.

◆ isLogging()
|
inline |
◆ isPortOpen()
|
inline |
Return whether the communication port is open or not.
Definition at line 456 of file cmt3.h.
References xsens::Cmt2s::isOpen(), and m_serial.

◆ isXm()
| bool xsens::Cmt3::isXm | ( | void | ) | const |
Return whether the main device is an Xbus Master or not.
Definition at line 1558 of file cmt3.cpp.
References CMT_DID_TYPEH_MASK, CMT_DID_TYPEH_XM, m_config, and CmtDeviceConfiguration::m_masterDeviceId.
Referenced by getDeviceCount(), getEMtsData(), getErrorMode(), requestData(), setDeviceMode2(), setErrorMode(), setSyncInMode(), setSyncInOffset(), setSyncInSettings(), setSyncInSkipFactor(), setSyncMode(), setSyncOutMode(), setSyncOutOffset(), setSyncOutPulseWidth(), setSyncOutSettings(), setSyncOutSkipFactor(), setXmOutputMode(), and setXmPowerOff().
◆ openLogFile() [1/2]
| XsensResultValue xsens::Cmt3::openLogFile | ( | const char * | filename | ) |
Open a log file for input.
This function opens the supplied log file for reading. The function will fail if a serial connection is currently open.
- Parameters
-
filename The name of the file to open. It is recommended to use a fully qualified path+filename.
- Note
- This function is only available in configuration mode.
Definition at line 2835 of file cmt3.cpp.
References xsens::Cmt2f::close(), CMT3EXITLOG, CMT3LOG, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, m_readFromFile, m_serial, xsens::Cmt2f::open(), refreshCache(), XRV_ALREADYOPEN, XRV_INVALIDOPERATION, and XRV_OK.
◆ openLogFile() [2/2]
| XsensResultValue xsens::Cmt3::openLogFile | ( | const wchar_t * | filename | ) |
Open a log file for input.
This function opens the supplied log file for reading. The function will fail if a serial connection is currently open.
- Parameters
-
filename The name of the file to open. It is recommended to use a fully qualified path+filename.
- Note
- This function is only available in configuration mode.
Definition at line 2858 of file cmt3.cpp.
References xsens::Cmt2f::close(), CMT3EXITLOG, CMT3LOG, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, m_readFromFile, m_serial, xsens::Cmt2f::open(), refreshCache(), XRV_ALREADYOPEN, XRV_INVALIDOPERATION, and XRV_OK.
◆ openPort() [1/2]
| XsensResultValue xsens::Cmt3::openPort | ( | const char * | portName, |
| const uint32_t | baudRate = CMT_DEFAULT_BAUD_RATE |
||
| ) |
Definition at line 1566 of file cmt3.cpp.
References xsens::Cmt2s::close(), CMT3EXITLOG, CMT3LOG, gotoConfig(), initBus(), xsens::Cmt2f::isOpen(), m_baudrate, m_lastResult, m_logFile, m_logging, m_measuring, m_rtcInitialized, m_serial, m_timeoutConf, m_timeoutMeas, xsens::Cmt2s::open(), refreshCache(), xsens::Cmt2s::setTimeout(), XRV_ALREADYOPEN, XRV_CONFIGCHECKFAIL, XRV_OK, and xsensResultText().
Referenced by xsens::cmtScanPort(), and setBaudrate().

◆ openPort() [2/2]
| XsensResultValue xsens::Cmt3::openPort | ( | const uint32_t | portNumber, |
| const uint32_t | baudRate = CMT_DEFAULT_BAUD_RATE |
||
| ) |
Open a communication channel to.
the given COM port number.
This function is first passed through to the Cmt2s object. Then, the device settings are retrieved and stored locally. This function automatically places the device(s) in config mode, using gotoConfig.
- See also
- gotoConfig closePort
Definition at line 1625 of file cmt3.cpp.
References xsens::Cmt2s::close(), CMT3EXITLOG, CMT3LOG, gotoConfig(), initBus(), xsens::Cmt2f::isOpen(), m_baudrate, m_lastResult, m_logFile, m_logging, m_measuring, m_rtcInitialized, m_serial, m_timeoutConf, m_timeoutMeas, xsens::Cmt2s::open(), refreshCache(), xsens::Cmt2s::setTimeout(), XRV_ALREADYOPEN, XRV_CONFIGCHECKFAIL, XRV_OK, and xsensResultText().
◆ peekLogMessageId()
| XsensResultValue xsens::Cmt3::peekLogMessageId | ( | uint8_t & | messageId | ) |
Open a communication channel to.
the given COM port number.
This function is first passed through to the Cmt2s object. Then, the device settings are retrieved and stored locally. This function automatically places the device(s) in config mode, using gotoConfig.
- See also
- gotoConfig closePort
Peek(take a look) at the message ID of the next message.
This function can only be used when reading from a log file. It will find the next message in the file and place its message ID in the messageId parameter. Afterwards, the read position of the file will be restored.
- Remarks
- This function is mostly useful when dealing with a file that has more than just data messages. By using the peek function, it is possible to decide whether a readDataPacket should be called or for example getBatteryLevel or getGpsStatus. When the peek function is not used and for example getBatteryLevel is called, all messages between the current read position and the first battery level message in the file will be skipped. An alternative would be to get the read position, call the desired function (get battery level) and restore the read position, but then the moment at which the (battery level, UTC time, satellite info, etc) data becomes available will not be known.
Definition at line 1686 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Message::getMessageId(), xsens::Cmt2f::getReadPosition(), m_lastResult, m_logFile, m_readFromFile, xsens::Cmt2f::readMessage(), xsens::Cmt2f::setReadPosition(), XRV_INVALIDOPERATION, and XRV_OK.
◆ readDataPacket()
| XsensResultValue xsens::Cmt3::readDataPacket | ( | Packet * | pack, |
| bool | acceptOther = false |
||
| ) |
Retrieve a data message.
This function will attempt to read a data message from the open port or from the log file, depending on the system state. When acceptOther is set to true, the first received message will be returned. If a data message is successfully read, XRV_OK will be returned. If another message is read, XRV_OTHER will be returned and the received message will be placed in the Packet. Otherwise, an appropriate error will be returned.
Definition at line 1712 of file cmt3.cpp.
References CMT3EXITLOGDAT, CMT3LOGDAT, CMT_MID_ERROR, CMT_MID_MTDATA, fillRtc(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Message::getMessageId(), m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, xsens::Packet::m_itemCount, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, xsens::Packet::m_msg, CmtDeviceConfiguration::m_numberOfDevices, CmtDeviceConfiguration::_devInfo::m_outputMode, CmtDeviceConfiguration::_devInfo::m_outputSettings, m_readFromFile, m_serial, xsens::Packet::m_toa, m_useRtc, xsens::Cmt2f::readMessage(), xsens::Cmt2s::readMessage(), xsens::Packet::setDataFormat(), xsens::Packet::setXbus(), xsens::timeStampNow(), xsens::Cmt2f::writeMessage(), XRV_OK, and XRV_OTHER.
Referenced by requestData().

◆ refreshCache()
| XsensResultValue xsens::Cmt3::refreshCache | ( | const bool | file = false | ) |
Update device information stored on host PC.
Some device information is cached on the host PC for faster access. The Cmt3 automatically tries to keep the cache up to date. But when unexpected things happen, such as custom messages that change the settings, or a power-cycle, then the user may need to tell Cmt3 to update its cache. When both a file and a port are open, the file parameter can be used to indicate what data source to read from (true is file, false is port).
- Note
- This function is only available in configuration mode.
Definition at line 2594 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MAX_DEVICES_PER_PORT, CMT_MID_CONFIGURATION, CMT_MID_REQCONFIGURATION, xsens::Message::getMessageStart(), gotoConfig(), xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_config, m_eMtsData, m_lastResult, m_logFile, m_logging, m_measuring, CmtDeviceConfiguration::m_outputSkipFactor, m_period, CmtDeviceConfiguration::m_samplingPeriod, m_serial, m_skip, CmtDeviceConfiguration::readFromMessage(), xsens::Cmt2f::readMessage(), xsens::Message::setMessageId(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_NOFILEORPORTOPEN, and XRV_OK.
Referenced by openLogFile(), openPort(), and reset().

◆ requestData()
| XsensResultValue xsens::Cmt3::requestData | ( | Packet * | pack | ) |
Definition at line 1816 of file cmt3.cpp.
References CMT3EXITLOGDAT, CMT3LOGDAT, CMT_MID_REQDATA, isXm(), m_lastResult, m_serial, readDataPacket(), xsens::Cmt2s::writeMessage(), and XRV_INVALIDOPERATION.
◆ reset()
| XsensResultValue xsens::Cmt3::reset | ( | void | ) |
Request a data.
message and wait for it to arrive.
This function is only useful when the skip factor is set to 0xFFFF.
Reset all connected sensors.
Definition at line 1829 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_RESET, CMT_MID_RESETACK, m_lastResult, m_logFile, m_logging, m_measuring, m_serial, refreshCache(), xsens::Message::setBusId(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), and XRV_OK.
◆ resetLogFileReadPos()
| XsensResultValue xsens::Cmt3::resetLogFileReadPos | ( | void | ) |
Restart reading from the start of the open log file.
This function resets the read position to the start of the open log file. Only the read position is affected, the write position remains the same.
- See also
- openLogFile
Definition at line 2924 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, m_lastResult, m_logFile, and xsens::Cmt2f::setReadPosition().

◆ resetOrientation()
| XsensResultValue xsens::Cmt3::resetOrientation | ( | const CmtResetMethod | method, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Perform an orientation reset on a device.
This function performs an orientation reset. See the MT documentation for more information about Orientation resets.
- Note
- If you wish to save the setting to the device, perform the CMT_RESETORIENTATION_STORE operation while in Config mode after having performed the appropriate orientation reset in measurement mode.
Definition at line 1848 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_RESETORIENTATION, CMT_MID_RESETORIENTATION, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ restoreFactoryDefaults()
| XsensResultValue xsens::Cmt3::restoreFactoryDefaults | ( | const CmtDeviceId | deviceId = CMT_DID_MASTER | ) |
Restore the device to factory default settings.
Restore the factory defaults of a device.
This function completely restores the selected device to the default settings (115k2 baud rate, 100Hz sample frequency, factory defined scenarios).
- Note
- This function is only available in configuration mode.
Definition at line 1862 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_MID_RESTOREFACTORYDEF, deviceId, DO_DATA_REQUEST, m_lastResult, and XRV_OK.
◆ setBaudrate()
| XsensResultValue xsens::Cmt3::setBaudrate | ( | const uint32_t | baudrate, |
| bool | reconnect = true |
||
| ) |
Set the baudrate and possibly reconnect.
Use this function to change the baudrate of the device. This actually tries to change the baud rate of the current connection. When reconnect is set to true, the device receives a Reset message and the port is reopened at the new baudrate. Otherwise, make sure to perform a Reset manually, since the new baudrate will not be set until a Reset has been performed.
- Note
- To change the baudrate of the serial connection while connected via Bluetooth, use setSerialBaudrate.
- See also
- getBaudrate setSerialBaudrate getSerialBaudrate
- Note
- This function is only available in configuration mode.
Definition at line 1888 of file cmt3.cpp.
References closePort(), CMT3EXITLOG, CMT3LOG, CMT_BAUD_RATE_115K2, CMT_BAUD_RATE_19K2, CMT_BAUD_RATE_230K4, CMT_BAUD_RATE_38K4, CMT_BAUD_RATE_460K8, CMT_BAUD_RATE_57K6, CMT_BAUD_RATE_921K6, CMT_BAUD_RATE_9600, CMT_BAUDCODE_115K2, CMT_BAUDCODE_19K2, CMT_BAUDCODE_230K4, CMT_BAUDCODE_38K4, CMT_BAUDCODE_460K8, CMT_BAUDCODE_57K6, CMT_BAUDCODE_921K6, CMT_BAUDCODE_9K6, CMT_BID_MASTER, CMT_LEN_BAUDRATE, CMT_MID_REQBAUDRATE, CMT_MID_RESET, CMT_MID_RESETACK, DO_DATA_SET_BID, xsens::Cmt2s::getPortName(), xsens::Cmt2s::getPortNr(), gotoMeasurement(), m_baudrate, m_lastResult, m_logFile, m_logging, m_measuring, m_serial, openPort(), xsens::Message::setBusId(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_BAUDRATEINVALID, and XRV_OK.
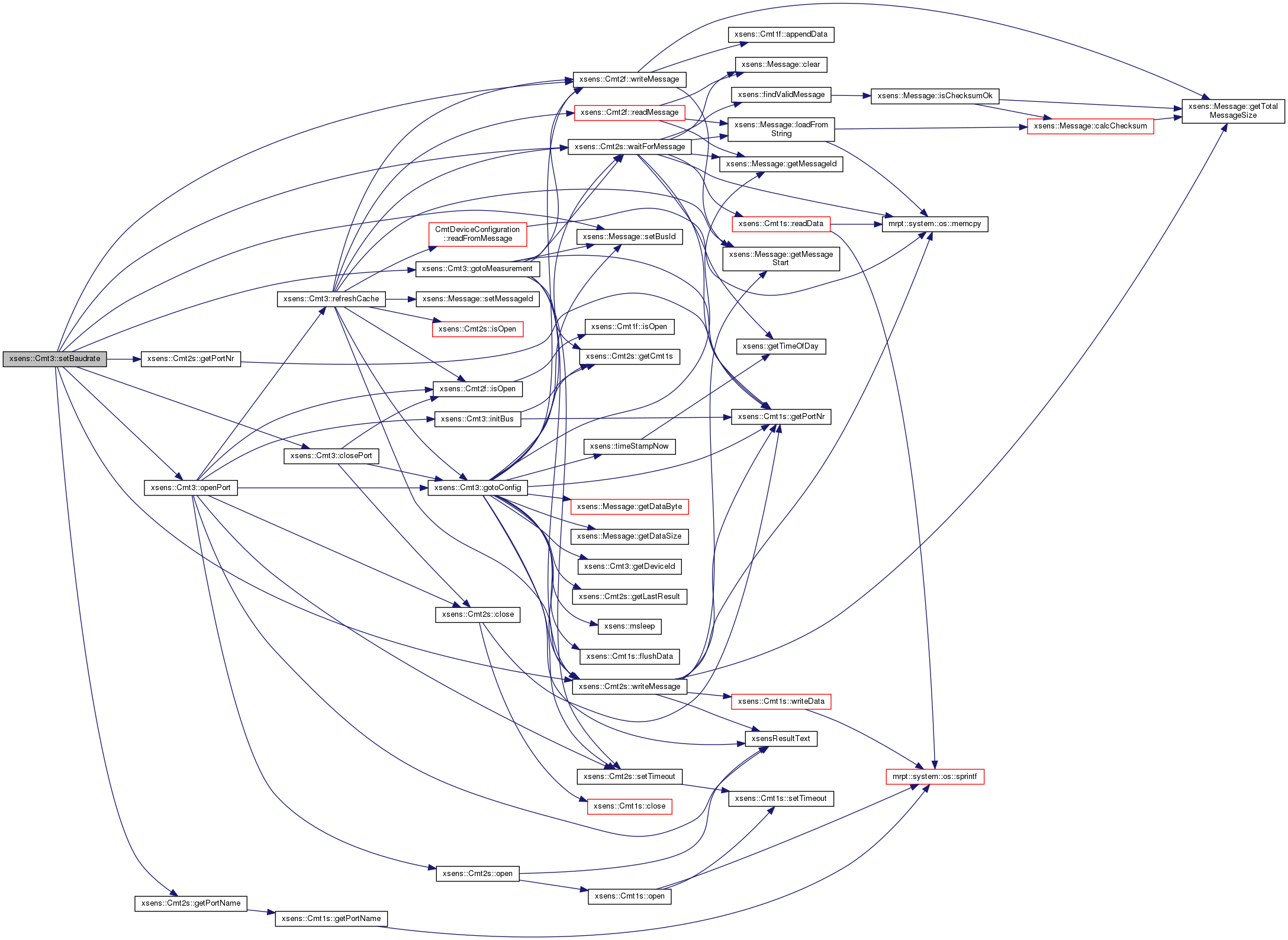
◆ setBluetoothState()
| XsensResultValue xsens::Cmt3::setBluetoothState | ( | const bool | enabled | ) |
Set the Bluetooth state of the Xbus Master.
This function sets the state of the bluetooth communication to on or off.
- Note
- This function is only available in configuration mode.
Definition at line 1976 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_LEN_BTDISABLE, CMT_MID_REQBTDISABLE, DO_DATA_SET_BID, m_lastResult, and XRV_OK.
◆ setBusPowerState()
| XsensResultValue xsens::Cmt3::setBusPowerState | ( | const bool | enabled | ) |
Switch the Xbus Master bus power on or off.
Use this function to switch the Xbus Master Xbus power on or off.
- Remarks
- This function can be used to save a lot of power when not measuring, while still keeping a connection to the system. However, there is a relatively long startup time when restoring power as the sensors are reinitialized.
- Note
- You will need to perform an initBus and possibly a refreshCache call after switching the power back on with this function.
- This function is only available in configuration mode.
- See also
- initBus refreshCache
Definition at line 1989 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_LEN_BUSPWR, CMT_MID_BUSPWR, DO_DATA_SET_BID, m_lastResult, and XRV_OK.
◆ setDataSource()
| XsensResultValue xsens::Cmt3::setDataSource | ( | bool | readFromFile | ) |
Set whether to read from comm port or file.
While it is not possible to open a port or file while the other is open, it is possible to create a log file while a port is open. In some rare cases it may be required to log data and read it back while the port remains open and then continue logging in the same file. This is not recommended. Instead, log to a file, close it and then open it in another Cmt3 object. However, if you must do this, then this function can be used to specify that you want to switch between reading from the log file (true) or port (false).
Definition at line 2881 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2s::isOpen(), xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, m_readFromFile, m_serial, XRV_INVALIDOPERATION, XRV_NOFILEORPORTOPEN, and XRV_OK.

◆ setDeviceMode()
| XsensResultValue xsens::Cmt3::setDeviceMode | ( | const CmtDeviceMode & | mode, |
| bool | force, | ||
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the complete output mode of a device.
This function updates the complete output mode of the specified device. It only updates values that are different than those reported by the device unless force is set to true. The function will automatically update only the part of the device mode that is relevant for the device. So it is possible to configure all devices, including an Xbus Master with the same mode (only the Xbus Master will update its period, while the Motion Trackers will update their output mode and settings).
- Note
- This function is only available in configuration mode.
Definition at line 2001 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, deviceId, CmtDeviceMode2::m_outputMode, CmtDeviceMode2::m_outputSettings, setDeviceMode2(), and CmtDeviceMode2::setSampleFrequency().
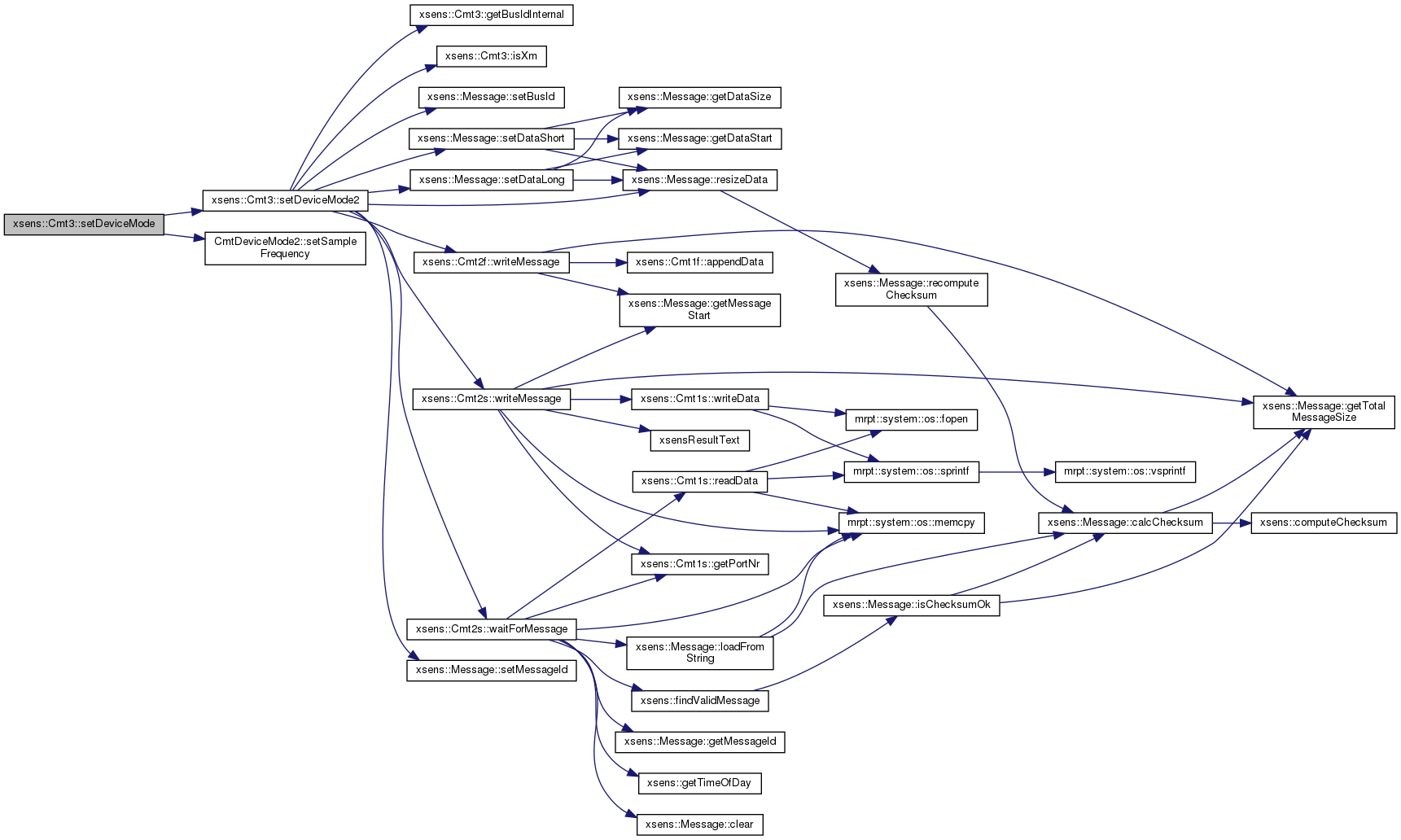
◆ setDeviceMode2()
| XsensResultValue xsens::Cmt3::setDeviceMode2 | ( | const CmtDeviceMode2 & | mode, |
| bool | force, | ||
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the complete output mode2 of a device.
This function updates the complete output mode of the specified device. It only updates values that are different than those reported by the device unless force is set to true. The function will automatically update only the part of the device mode that is relevant for the device. So it is possible to configure all devices, including an Xbus Master with the same mode (only the Xbus Master will update its period, while the Motion Trackers will update their output mode and settings).
- Note
- This function is only available in configuration mode.
- See also
- getDeviceMode2 getDeviceMode setDeviceMode
Definition at line 2020 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_BROADCAST, CMT_BID_INVALID, CMT_BID_MASTER, CMT_DID_BROADCAST, CMT_DID_TYPEH_MASK, CMT_DID_TYPEH_XM, CMT_MID_REQOUTPUTMODE, CMT_MID_REQOUTPUTMODEACK, CMT_MID_REQOUTPUTSETTINGS, CMT_MID_REQOUTPUTSETTINGSACK, CMT_MID_REQOUTPUTSKIPFACTOR, CMT_MID_REQOUTPUTSKIPFACTORACK, CMT_MID_REQPERIOD, CMT_MID_REQPERIODACK, CMT_OUTPUTSETTINGS_TIMESTAMP_MASK, deviceId, getBusIdInternal(), HANDLE_ERR_RESULT, isXm(), m_config, CmtDeviceConfiguration::_devInfo::m_deviceId, CmtDeviceConfiguration::m_deviceInfo, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, CmtDeviceConfiguration::m_numberOfDevices, CmtDeviceConfiguration::_devInfo::m_outputMode, CmtDeviceConfiguration::_devInfo::m_outputSettings, CmtDeviceConfiguration::m_outputSkipFactor, m_period, CmtDeviceConfiguration::m_samplingPeriod, m_serial, m_skip, xsens::Message::resizeData(), xsens::Message::setBusId(), xsens::Message::setDataLong(), xsens::Message::setDataShort(), xsens::Message::setMessageId(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDID, and XRV_OK.
Referenced by setDeviceMode().
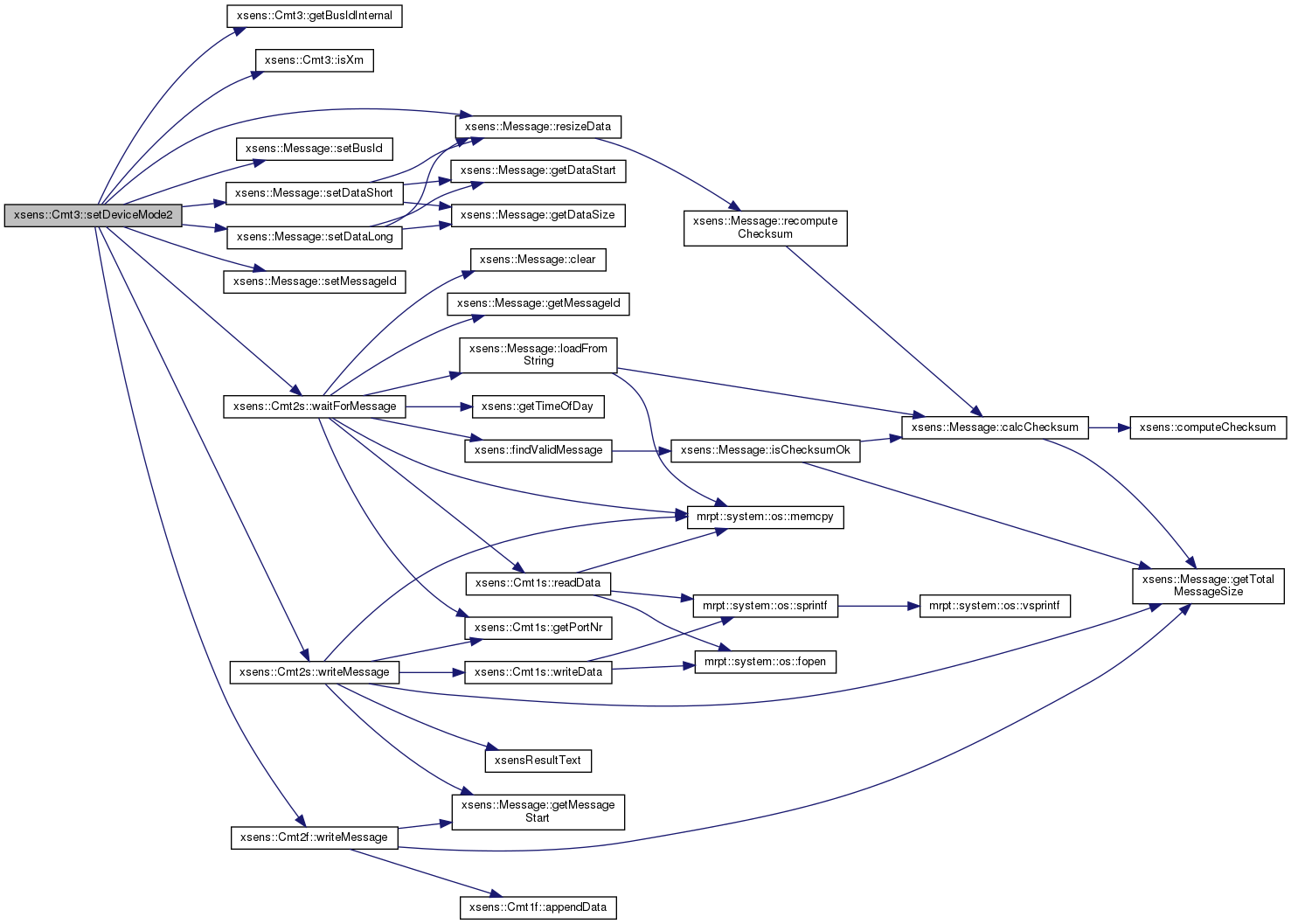

◆ setErrorMode()
| XsensResultValue xsens::Cmt3::setErrorMode | ( | const uint16_t | mode | ) |
Set the error mode of the device.
This function sets the error mode of the device. The error mode determines how the device handles errors. See the low-level communication documentation for more details.
- Note
- This function is only available in configuration mode.
- See also
- getErrorMode
Definition at line 2162 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_LEN_ERRORMODE, CMT_MID_REQERRORMODE, CMT_MID_REQXMERRORMODE, DO_DATA_SET_BID, isXm(), m_lastResult, and XRV_OK.

◆ setGotoConfigTries()
| XsensResultValue xsens::Cmt3::setGotoConfigTries | ( | const uint16_t | tries | ) |
Set the number of times the gotoConfig function will attempt a gotoConfig before failing.
This is especially useful when using RS485 communication or when for some reason the communication lines are not reliable.
Definition at line 2180 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, m_gotoConfigTries, m_lastResult, and XRV_OK.
Referenced by xsens::cmtScanPort().

◆ setGpsLeverArm()
| XsensResultValue xsens::Cmt3::setGpsLeverArm | ( | const CmtVector & | arm, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the currently used GPS lever arm.
Use this function to set the vector currently used as the GPS lever arm. The GPS lever arm is the relative position of the GPS antenna to the MTi-G unit. The arm is specified in the object coordinate system and in meters. See the manual for more information on coordinate systems, alignment resets and the lever arm.
- See also
- getGpsLeverArm
- Note
- This function is only available in configuration mode.
- This function is only available for MTi-G devices.
Definition at line 3055 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_BROADCAST, CMT_BID_INVALID, CMT_LEN_GPSLEVERARM, CMT_MID_ERROR, CMT_MID_SETGPSLEVERARM, CMT_MID_SETGPSLEVERARMACK, deviceId, getBusIdInternal(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Message::getMessageId(), m_config, CmtVector::m_data, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, m_serial, xsens::Message::setBusId(), xsens::Message::setDataFloat(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDID, and XRV_OK.
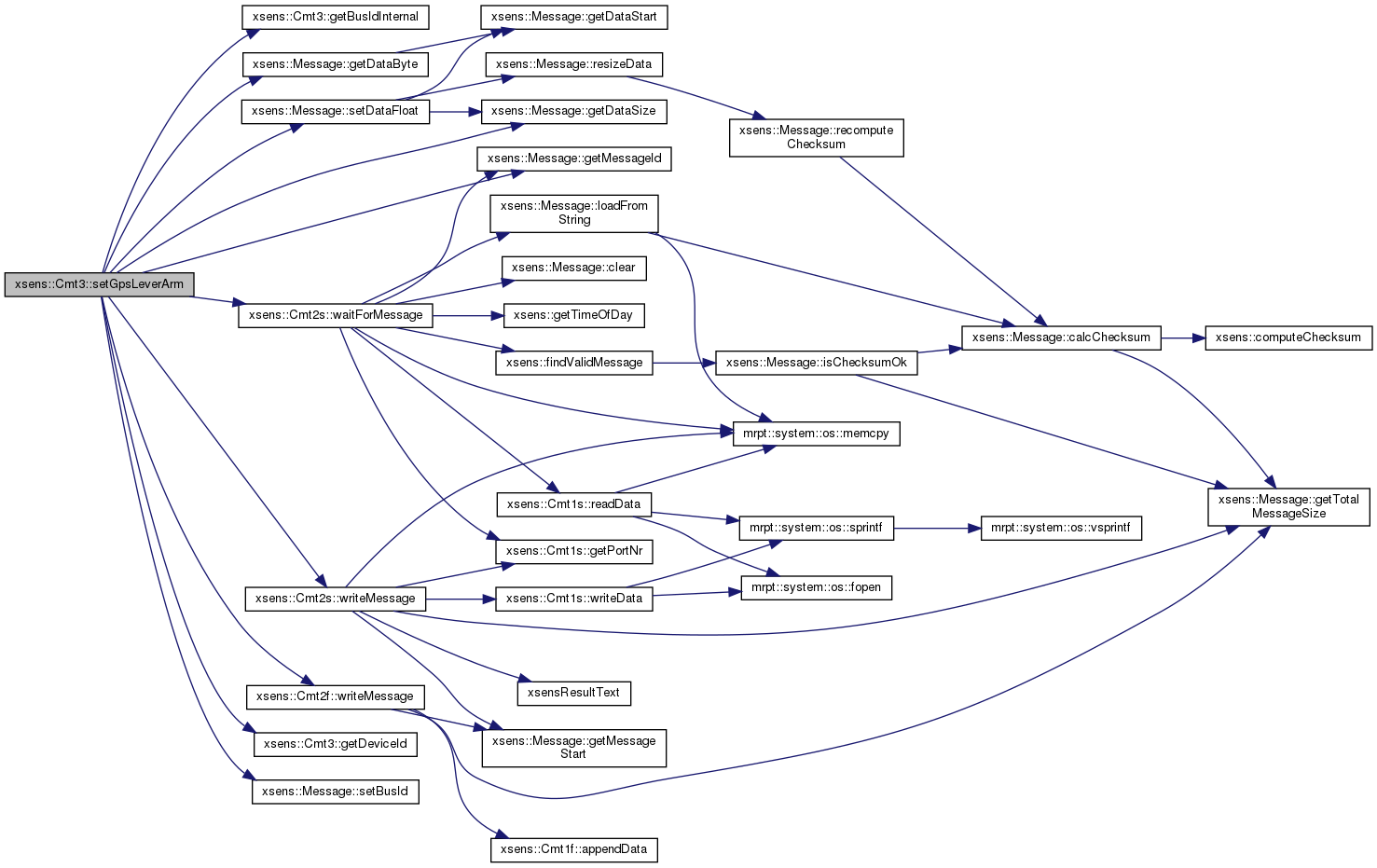
◆ setGravityMagnitude()
| XsensResultValue xsens::Cmt3::setGravityMagnitude | ( | const double | magnitude, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the currently used magnitude of the gravity vector.
The magnitude of the gravity vector is used to determine absolute acceleration from measured acceleration. Use this function to set tit to a custom value in m/s2. The default value of 9.812687357684514m/s2 should be fine for most places on earth, but in some cases the gravity may be drastically different from standard Earth gravity (eg. space, deep subterranean/submarine, polar regions, gravitational anomalies. See also http://www.abc.net.au/science/news/stories/s911917.htm and http://en.wikipedia.org/wiki/Earth%27s_gravity#Comparative_gravities_in_various_cities_around_the_world)
- Note
- Correct orientation output cannot be guaranteed when an incorrect value is supplied for the gravity. Changing this value is at your own risk.
- See also
- getGravityMagnitude
- Remarks
- In future versions, the MTi-G may be able to estimate the local gravity magnitude on its own.
- Note
- This function is only available in configuration mode.
Definition at line 3013 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_GRAVITYMAGNITUDE, CMT_MID_SETGRAVITYMAGNITUDE, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ setHeading()
| XsensResultValue xsens::Cmt3::setHeading | ( | const double | heading, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the heading offset.
This function sets the heading offset in radians used by the device. The valid range is -pi to +pi. The heading offset is used as a final correction on the output orientation.
- Note
- This function is only available in configuration mode.
Definition at line 2191 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_HEADING, CMT_MID_REQHEADING, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ setLocationId()
| XsensResultValue xsens::Cmt3::setLocationId | ( | uint16_t | locationId, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the location ID of a sensor.
This function sets the location ID stored in the device.
- Note
- This function is only available in configuration mode.
- See also
- getLocationId
Definition at line 2203 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_LOCATIONID, CMT_MID_REQLOCATIONID, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ setLogMode()
| XsensResultValue xsens::Cmt3::setLogMode | ( | bool | active | ) |
Set the logging mode.
This function sets the logging mode to enabled (true) or disabled (false). When enabled, all received messages are logged to the file.
- Remarks
- Some information that is cached on the host PC will generate faked messages in the log file. Eg. getConfiguration and some others.
Definition at line 2912 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, m_logging, m_readFromFile, XRV_NOFILEOPEN, and XRV_OK.

◆ setMagneticDeclination()
| XsensResultValue xsens::Cmt3::setMagneticDeclination | ( | const double | declination, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Set the stored magnetic declination.
This function sets the stored local magnetic declination in radians. The valid range is -pi to +pi. The magnetic declination is used in the sensor fusion process to determine the output orientation.
- Note
- This function is only available in configuration mode.
Definition at line 2216 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_MAGNETICDECLINATION, CMT_MID_SETMAGNETICDECLINATION, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ setScenario()
| XsensResultValue xsens::Cmt3::setScenario | ( | const uint8_t | scenarioType, |
| const CmtDeviceId | deviceId = CMT_DID_MASTER |
||
| ) |
Specify the scenario to use in the sensor.
This function specifies the scenario that the sensor should use for converting raw data into orientation and/or position data. This must be one of the scenarios in the list supplied by getAvailableScenarios.
- See also
- getAvailableScenarios getScenario
- Note
- This function is only available in configuration mode.
Definition at line 2991 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_LEN_SETSCENARIO, CMT_MID_SETSCENARIO, deviceId, DO_DATA_SET, m_lastResult, and XRV_OK.
◆ setSyncInMode()
| XsensResultValue xsens::Cmt3::setSyncInMode | ( | const uint16_t | mode | ) |
Set the inbound synchronization mode of an MT device.
This function sets the current inbound synchronization mode of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncInMode setSyncInSettings getSyncInSettings getSyncInSkipFactor setSyncInSkipFactor getSyncInOffset setSyncInOffset getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 2294 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_MODE, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
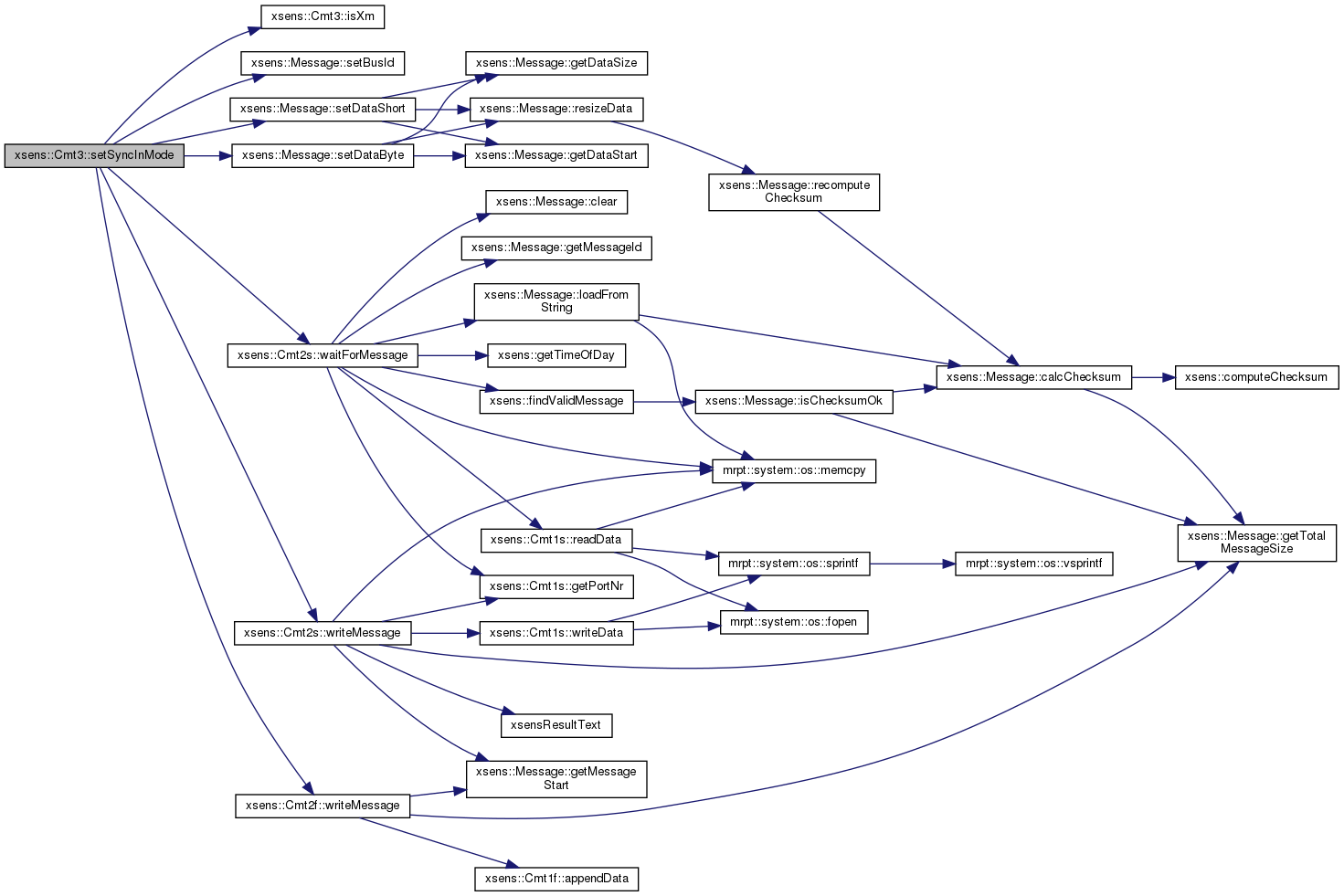
◆ setSyncInOffset()
| XsensResultValue xsens::Cmt3::setSyncInOffset | ( | const uint32_t | offset | ) |
Set the inbound synchronization offset of an MT device.
This function sets the current inbound synchronization offset of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncInOffset setSyncInSettings getSyncInSettings getSyncInSkipFactor setSyncInSkipFactor getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 2346 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_OFFSET, CMT_SYNC_CLOCK_NS_TO_TICKS, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataLong(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
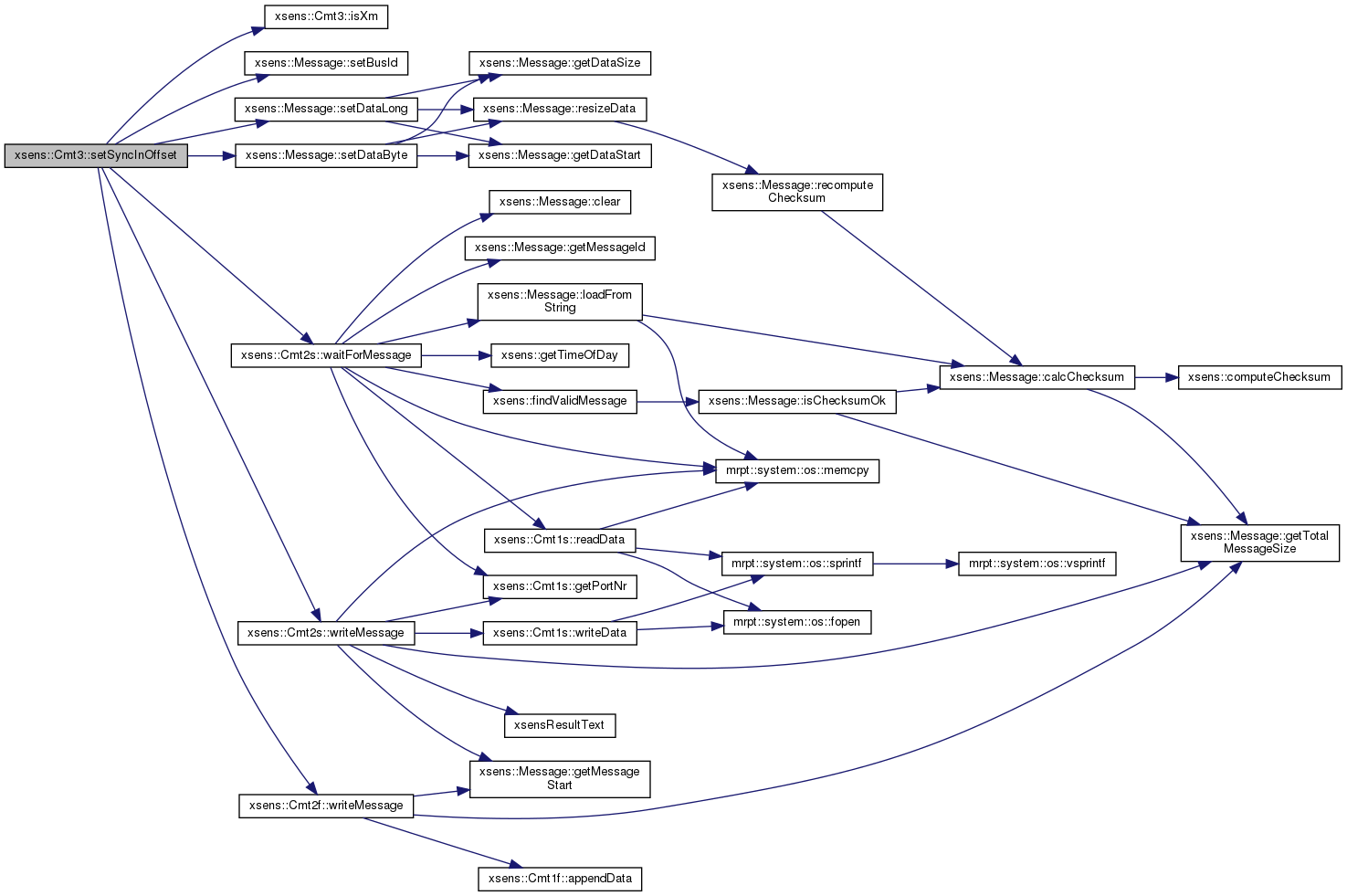
◆ setSyncInSettings()
| XsensResultValue xsens::Cmt3::setSyncInSettings | ( | const CmtSyncInSettings & | settings | ) |
Set the inbound synchronization settings of an MT device.
This function sets the current inbound synchronization settings of the MT device (sync mode, skip factor and offset). This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- Note
- This function is only available in configuration mode.
Definition at line 2243 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_MODE, CMT_PARAM_SYNCIN_OFFSET, CMT_PARAM_SYNCIN_SKIPFACTOR, CMT_SYNC_CLOCK_NS_TO_TICKS, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, CmtSyncInSettings::m_mode, CmtSyncInSettings::m_offset, m_serial, CmtSyncInSettings::m_skipFactor, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataLong(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
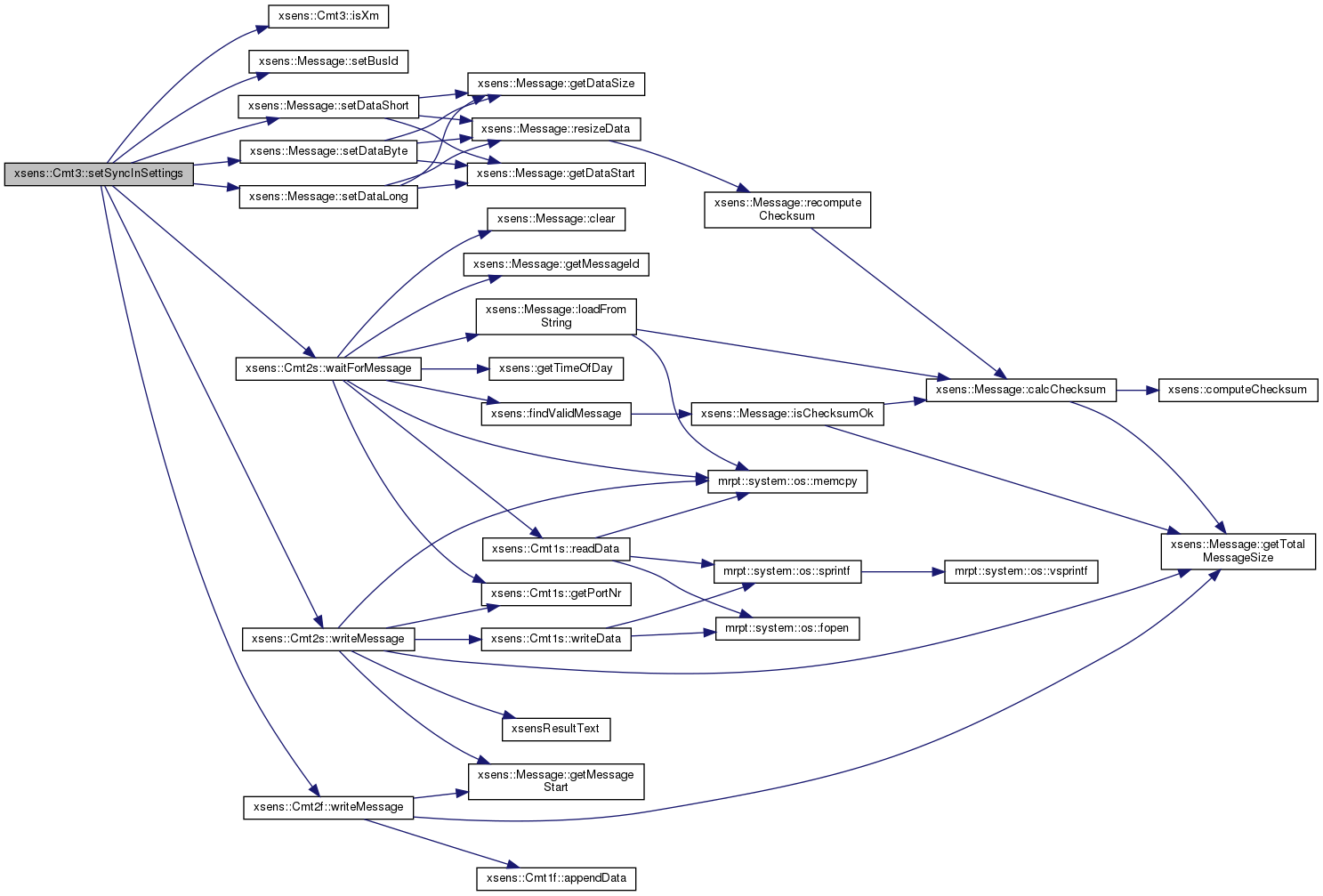
◆ setSyncInSkipFactor()
| XsensResultValue xsens::Cmt3::setSyncInSkipFactor | ( | const uint16_t | skipFactor | ) |
Set the inbound synchronization skip factor of an MT device.
This function sets the current inbound synchronization skip factor of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncInSkipFactor setSyncInSettings getSyncInSettings getSyncInOffset setSyncInOffset getSyncOutSettings setSyncOutSettings getSyncMode setSyncMode
Definition at line 2320 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCINSETTINGS, CMT_MID_REQSYNCINSETTINGSACK, CMT_PARAM_SYNCIN_SKIPFACTOR, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.

◆ setSyncMode()
| XsensResultValue xsens::Cmt3::setSyncMode | ( | const uint8_t | mode | ) |
Set the sync mode of the Xbus Master.
This function sets the current synchronization mode used by the specified Xbus Master. This function is not valid for MT devices.
- Note
- This function is only available in configuration mode.
Definition at line 2375 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_LEN_SYNCMODE, CMT_MID_REQSYNCMODE, DO_DATA_SET_BID, isXm(), m_lastResult, XRV_INVALIDOPERATION, and XRV_OK.

◆ setSyncOutMode()
| XsensResultValue xsens::Cmt3::setSyncOutMode | ( | const uint16_t | mode | ) |
Set the outbound synchronization mode of an MT device.
This function sets the current outbound synchronization mode of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncOutMode setSyncOutSettings getSyncOutSettings getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutSkipFactor setSyncOutSkipFactor getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 2451 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_MODE, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
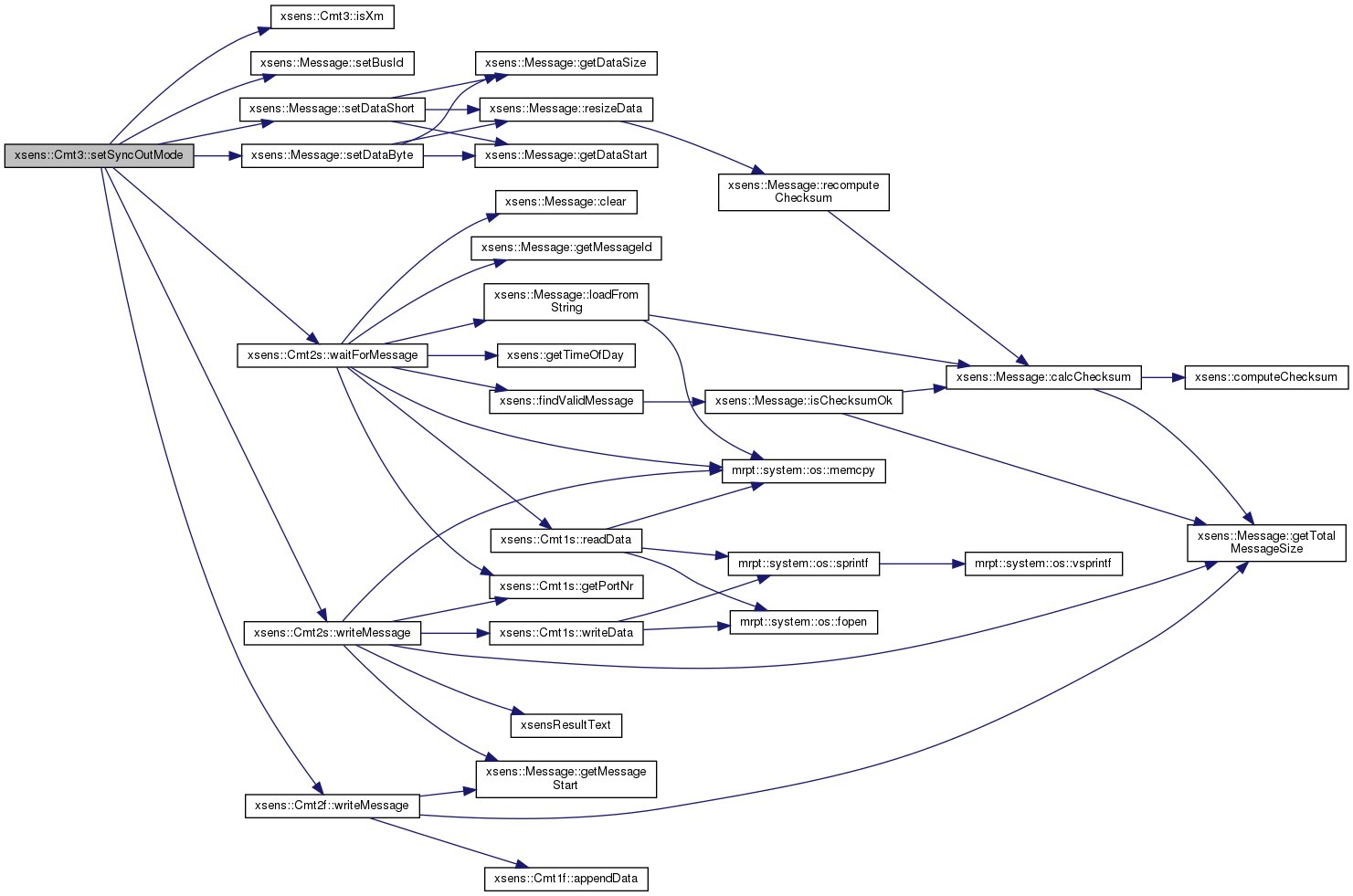
◆ setSyncOutOffset()
| XsensResultValue xsens::Cmt3::setSyncOutOffset | ( | const uint32_t | offset | ) |
Set the outbound synchronization offset of an MT device.
This function sets the current outbound synchronization offset of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncOutOffset setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutSkipFactor setSyncOutSkipFactor getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 2530 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_OFFSET, CMT_SYNC_CLOCK_NS_TO_TICKS, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataLong(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
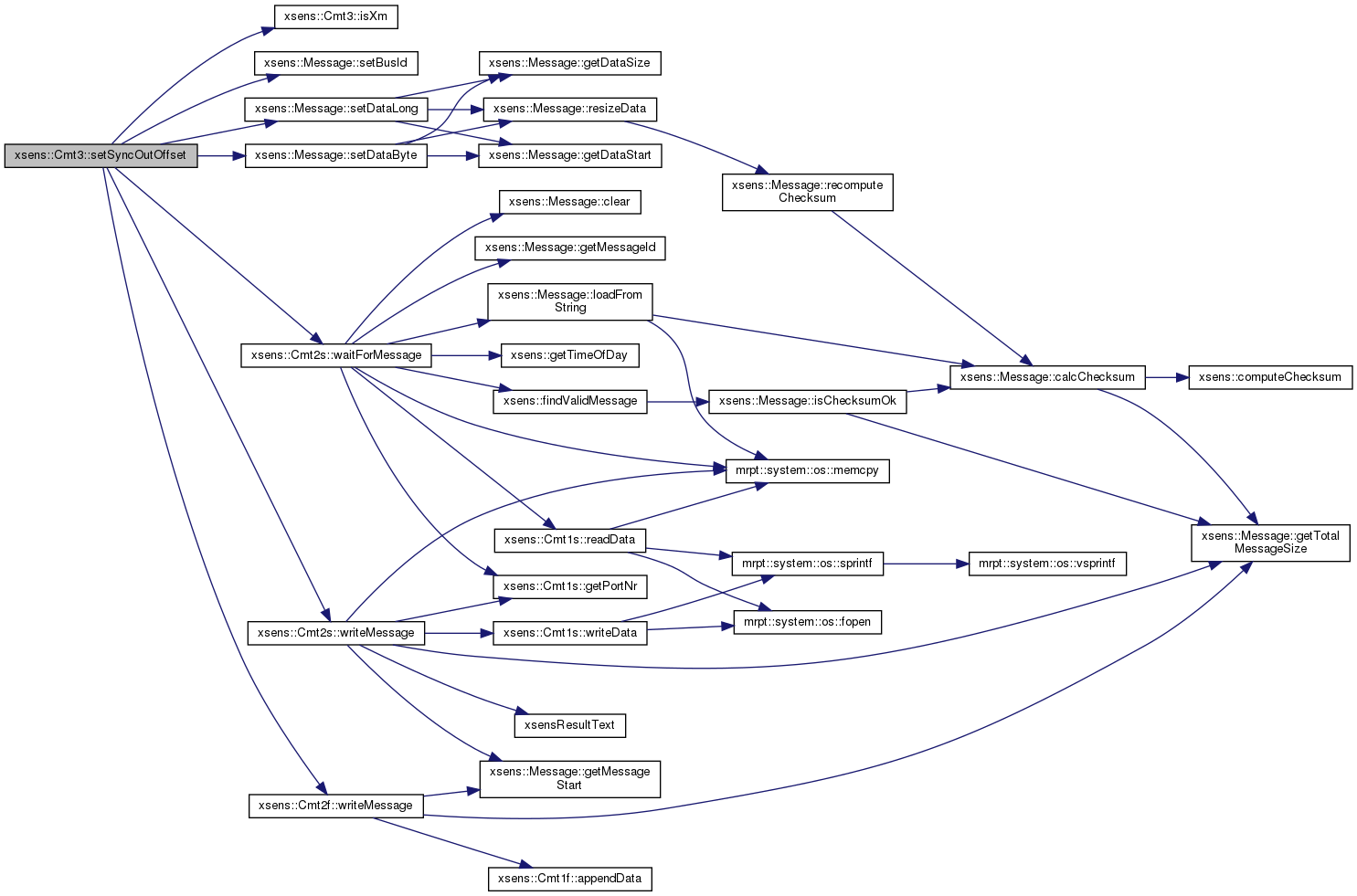
◆ setSyncOutPulseWidth()
| XsensResultValue xsens::Cmt3::setSyncOutPulseWidth | ( | const uint32_t | pulseWidth | ) |
Set the outbound synchronization pulse width of an MT device.
This function sets the current outbound synchronization pulse width of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- getSyncOutPulseWidth setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutSkipFactor setSyncOutSkipFactor getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 2477 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_PULSEWIDTH, CMT_SYNC_CLOCK_NS_TO_TICKS, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataLong(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
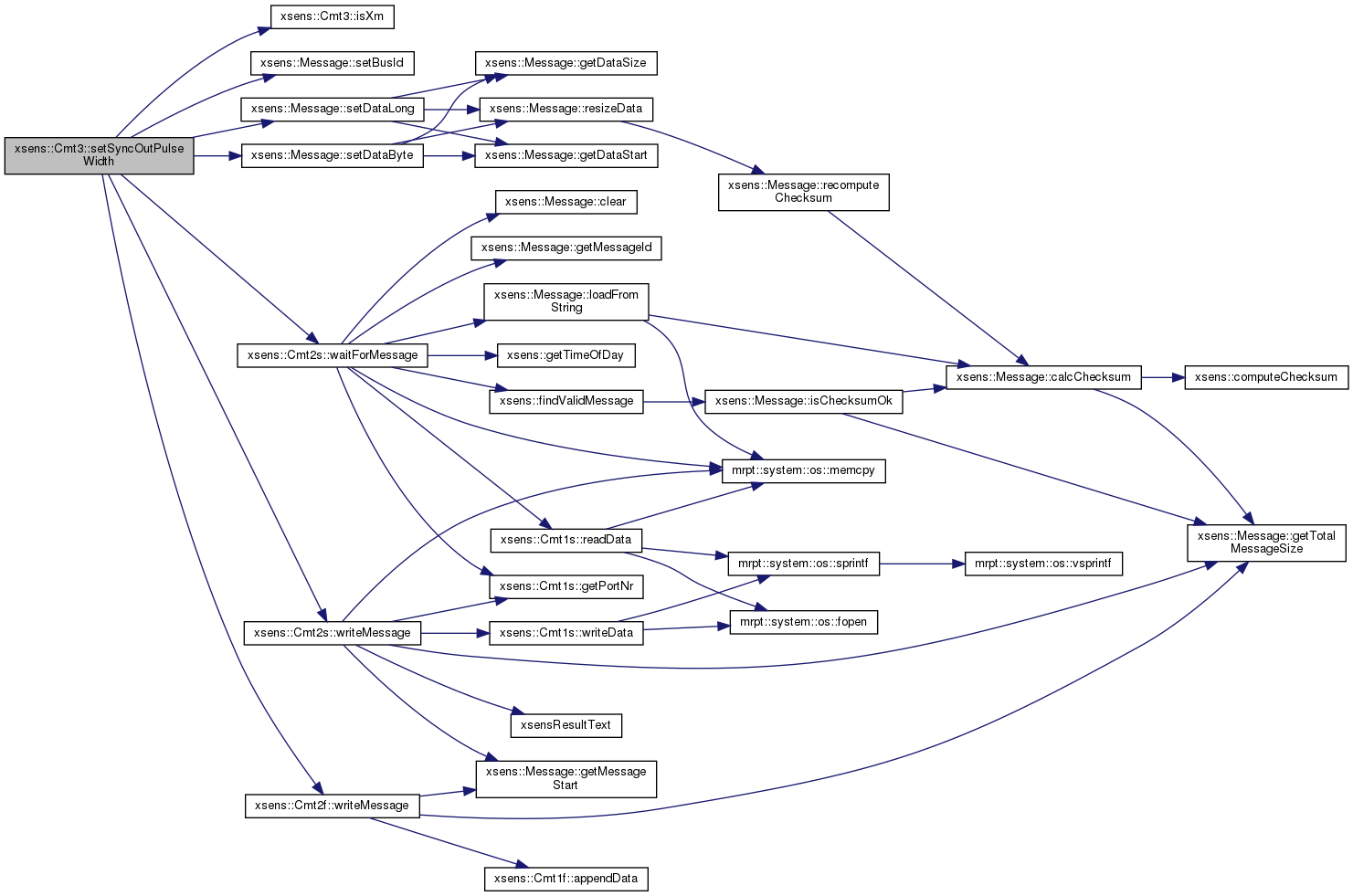
◆ setSyncOutSettings()
| XsensResultValue xsens::Cmt3::setSyncOutSettings | ( | const CmtSyncOutSettings & | settings | ) |
Set the outbound synchronization settings of an MT device.
This function sets the current outbound synchronization settings of the MT device (sync mode, skip factor, offset and pulse width). This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- Note
- This function is only available in configuration mode.
Definition at line 2389 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_MODE, CMT_PARAM_SYNCOUT_OFFSET, CMT_PARAM_SYNCOUT_PULSEWIDTH, CMT_PARAM_SYNCOUT_SKIPFACTOR, CMT_SYNC_CLOCK_NS_TO_TICKS, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, CmtSyncOutSettings::m_mode, CmtSyncOutSettings::m_offset, CmtSyncOutSettings::m_pulseWidth, m_serial, CmtSyncOutSettings::m_skipFactor, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataLong(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
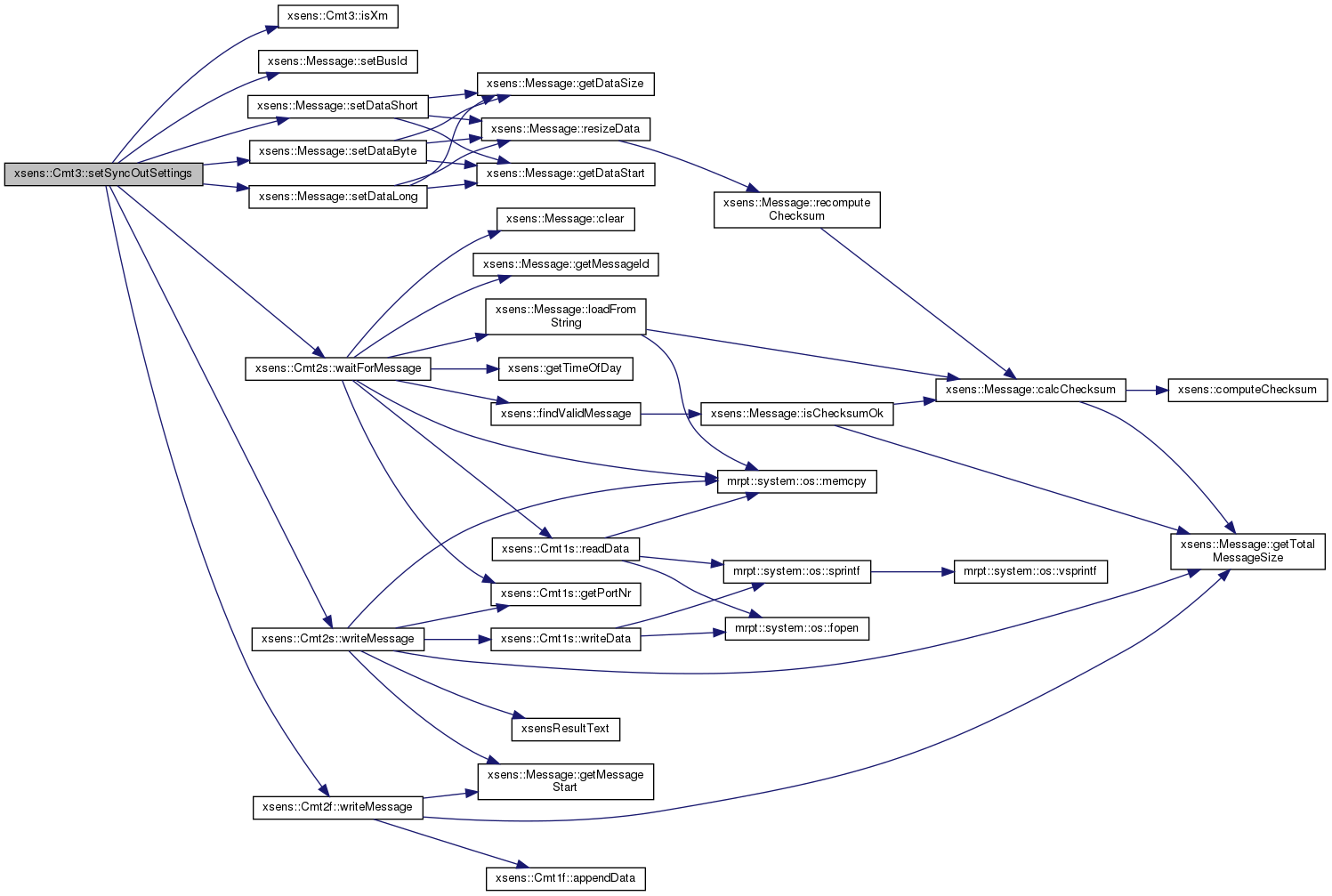
◆ setSyncOutSkipFactor()
| XsensResultValue xsens::Cmt3::setSyncOutSkipFactor | ( | const uint16_t | skipFactor | ) |
Set the outbound synchronization skip factor of an MT device.
This function sets the current outbound synchronization skip factor of the MT device. This function does not work for Xbus Masters and should not be used for sensors connected to an Xbus Master.
- See also
- setSyncOutSkipFactor setSyncOutSettings getSyncOutSettings setSyncOutMode getSyncOutMode getSyncOutPulseWidth setSyncOutPulseWidth getSyncOutOffset setSyncOutOffset getSyncInSettings setSyncInSettings getSyncMode setSyncMode
Definition at line 2504 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_REQSYNCOUTSETTINGS, CMT_MID_REQSYNCOUTSETTINGSACK, CMT_PARAM_SYNCOUT_SKIPFACTOR, HANDLE_ERR_RESULT, isXm(), m_lastResult, m_logFile, m_logging, m_serial, xsens::Message::setBusId(), xsens::Message::setDataByte(), xsens::Message::setDataShort(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDOPERATION, and XRV_OK.
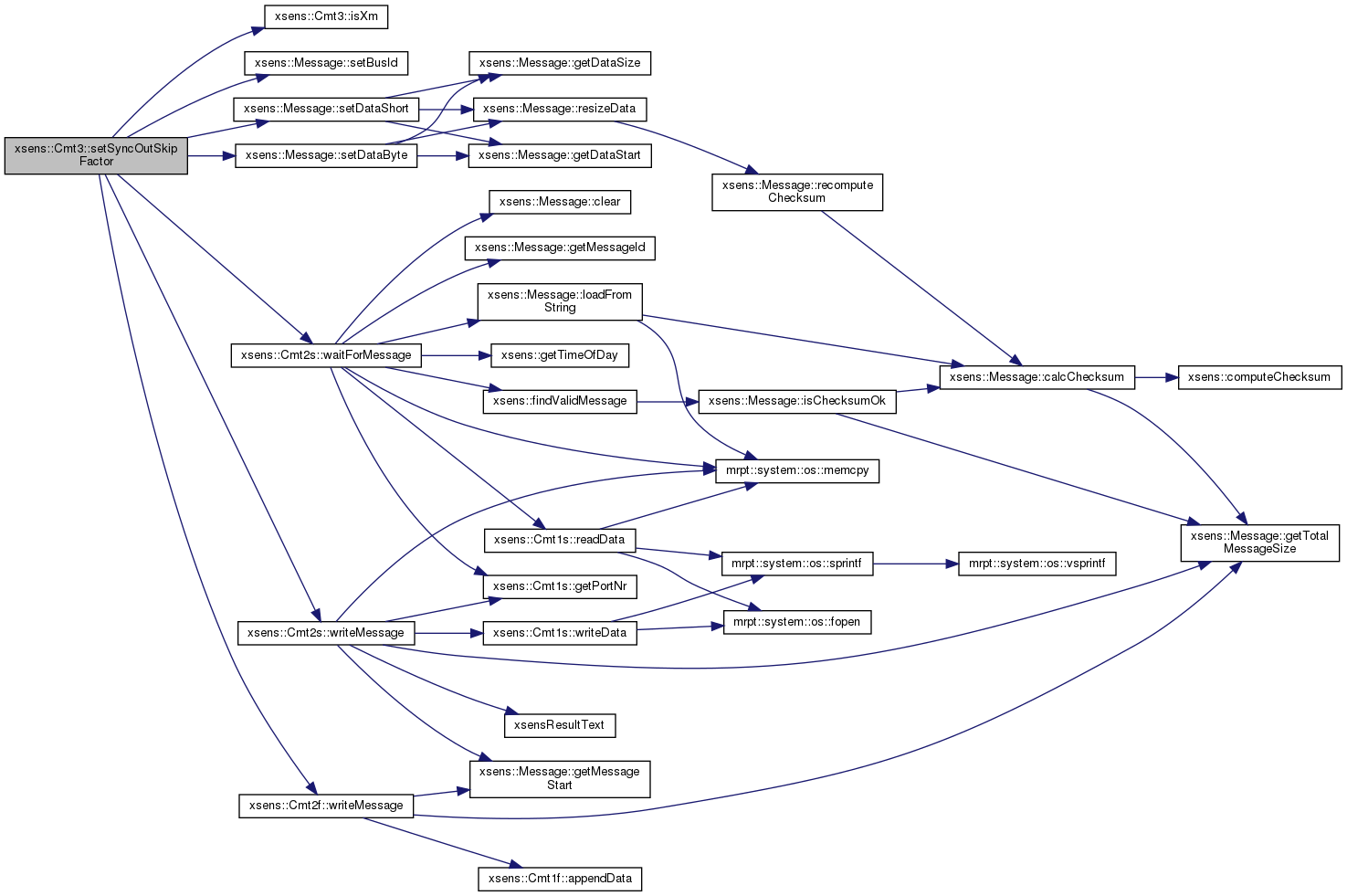
◆ setTimeout()
|
inline |
Set the default timeout value to use in blocking operations on the communication port.
Definition at line 699 of file cmt3.h.
References m_lastResult, m_serial, and xsens::Cmt2s::setTimeout().

◆ setTimeoutConfig()
| XsensResultValue xsens::Cmt3::setTimeoutConfig | ( | const uint32_t | timeout = CMT3_DEFAULT_TIMEOUT_CONF | ) |
Set the configuration mode timeout.
When in config mode, the system uses a different message timeout than in measurement mode, since configuration messages can take longer to process than measurement mode messages. This function can be used to set the config mode timeout in ms.
- Note
- This function is only available in configuration mode.
Definition at line 2557 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, m_lastResult, m_measuring, m_serial, m_timeoutConf, xsens::Cmt2s::setTimeout(), and XRV_OK.
Referenced by xsens::cmtScanPort().


◆ setTimeoutMeasurement()
| XsensResultValue xsens::Cmt3::setTimeoutMeasurement | ( | const uint32_t | timeout = CMT3_DEFAULT_TIMEOUT_MEAS | ) |
Set the measurement mode timeout.
When in measurement mode, the system uses a different message timeout than in config mode, since measurement mode messages should be faster to process than config mode messages. This function can be used to set the measurement mode timeout in ms.
- Note
- This function is only available in configuration mode.
Definition at line 2569 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, m_lastResult, m_measuring, m_serial, m_timeoutMeas, xsens::Cmt2s::setTimeout(), and XRV_OK.

◆ setXmOutputMode()
| XsensResultValue xsens::Cmt3::setXmOutputMode | ( | const uint8_t | mode | ) |
Set the dual-output mode of the XM.
This function sets the dual mode output mode of the Xbus Master. The dual output mode of the Xbus Master defines whether it will send data on the serial connection (at the same baud rate as the bluetooth connection) when it is connected via Bluetooth. When set to 0, the serial communication is disabled, data is sent over the serial bus.
- Note
- When dual-mode is enabled, the Xbus Master will NOT receive commands on the serial bus.
- This function is only available in configuration mode.
- See also
- getXmDualOutputMode
Definition at line 2581 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_LEN_OPMODE, CMT_MID_REQOPMODE, DO_DATA_SET_BID, isXm(), m_lastResult, XRV_INVALIDOPERATION, and XRV_OK.

◆ setXmPowerOff()
| XsensResultValue xsens::Cmt3::setXmPowerOff | ( | void | ) |
Switch the connected Xbus Master.
This function tell the connected Xbus Master to power down. This differs from setBusPowerState, because this function actually powers down the Xbus Master itself, while setBusPowerState only powers down the bus controlled by the Xbus Master. After This function is called, the Xbus Master must be manually switched on to make it operational again.
- See also
- setBusPowerState
Definition at line 2230 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_MASTER, CMT_MID_XMPWROFF, isXm(), m_lastResult, m_serial, xsens::Message::setBusId(), xsens::Cmt2s::writeMessage(), and XRV_INVALIDOPERATION.
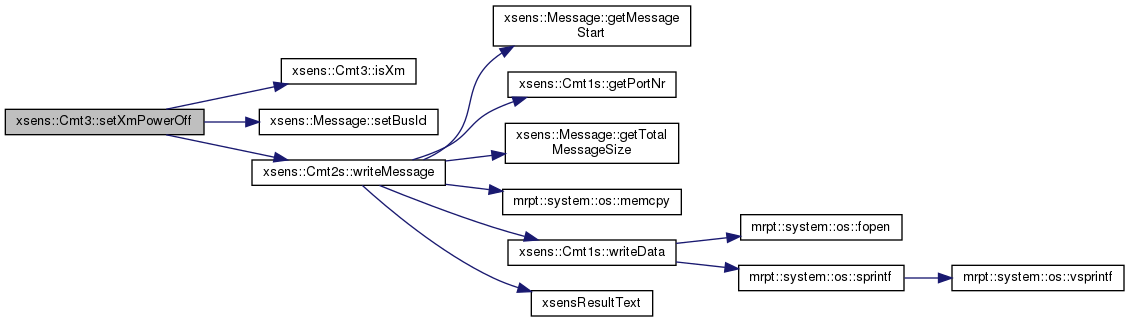
◆ storeXkfState()
| XsensResultValue xsens::Cmt3::storeXkfState | ( | const CmtDeviceId | deviceId = CMT_DID_MASTER | ) |
Store important components of the XKF filter state to non-volatile memory.
This function allows you to store some critical components of the internal XKF filter state to non-volatile memory. The stored settings will be used to initialize the filter whenever the sensor is switched to Measurement mode.
- Note
- This function is only available in Config mode.
Definition at line 3093 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, CMT_BID_BROADCAST, CMT_BID_INVALID, CMT_LEN_STOREXKFSTATE, CMT_MID_ERROR, CMT_MID_STOREXKFSTATE, CMT_MID_STOREXKFSTATEACK, deviceId, getBusIdInternal(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Message::getMessageId(), m_config, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, m_serial, xsens::Message::setBusId(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), xsens::Cmt2s::writeMessage(), XRV_INVALIDID, and XRV_OK.
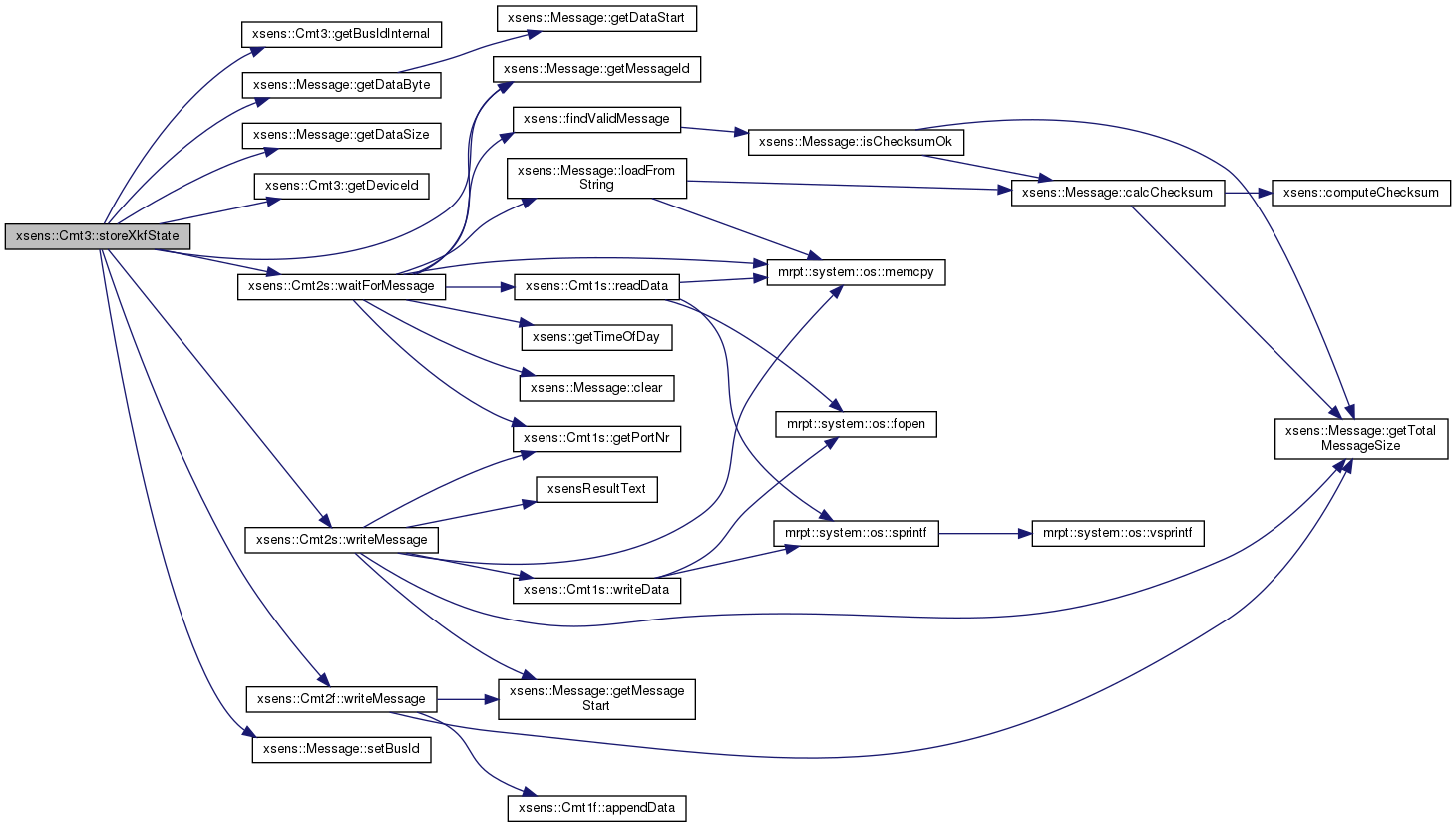
◆ waitForDataMessage()
| XsensResultValue xsens::Cmt3::waitForDataMessage | ( | Packet * | pack | ) |
Wait for a data message to arrive.
The function waits for a data message to arrive or until a timeout occurs. The function will also accept error messages.
Definition at line 2674 of file cmt3.cpp.
References CMT3EXITLOGDAT, CMT3LOGDAT, CMT_MID_ERROR, CMT_MID_MTDATA, fillRtc(), xsens::Message::getDataByte(), xsens::Message::getDataSize(), getDeviceId(), xsens::Message::getMessageId(), xsens::getTimeOfDay(), m_config, CmtDeviceConfiguration::m_deviceInfo, xsens::Packet::m_itemCount, m_lastHwError, m_lastHwErrorDeviceId, m_lastResult, m_logFile, m_logging, CmtDeviceConfiguration::m_masterDeviceId, xsens::Packet::m_msg, CmtDeviceConfiguration::m_numberOfDevices, CmtDeviceConfiguration::_devInfo::m_outputMode, CmtDeviceConfiguration::_devInfo::m_outputSettings, m_serial, m_timeoutMeas, xsens::Packet::m_toa, m_useRtc, xsens::Packet::setDataFormat(), xsens::timeStampNow(), xsens::Cmt2s::waitForMessage(), xsens::Cmt2f::writeMessage(), XRV_OK, XRV_TIMEOUTNODATA, and XSENS_MS_PER_DAY.
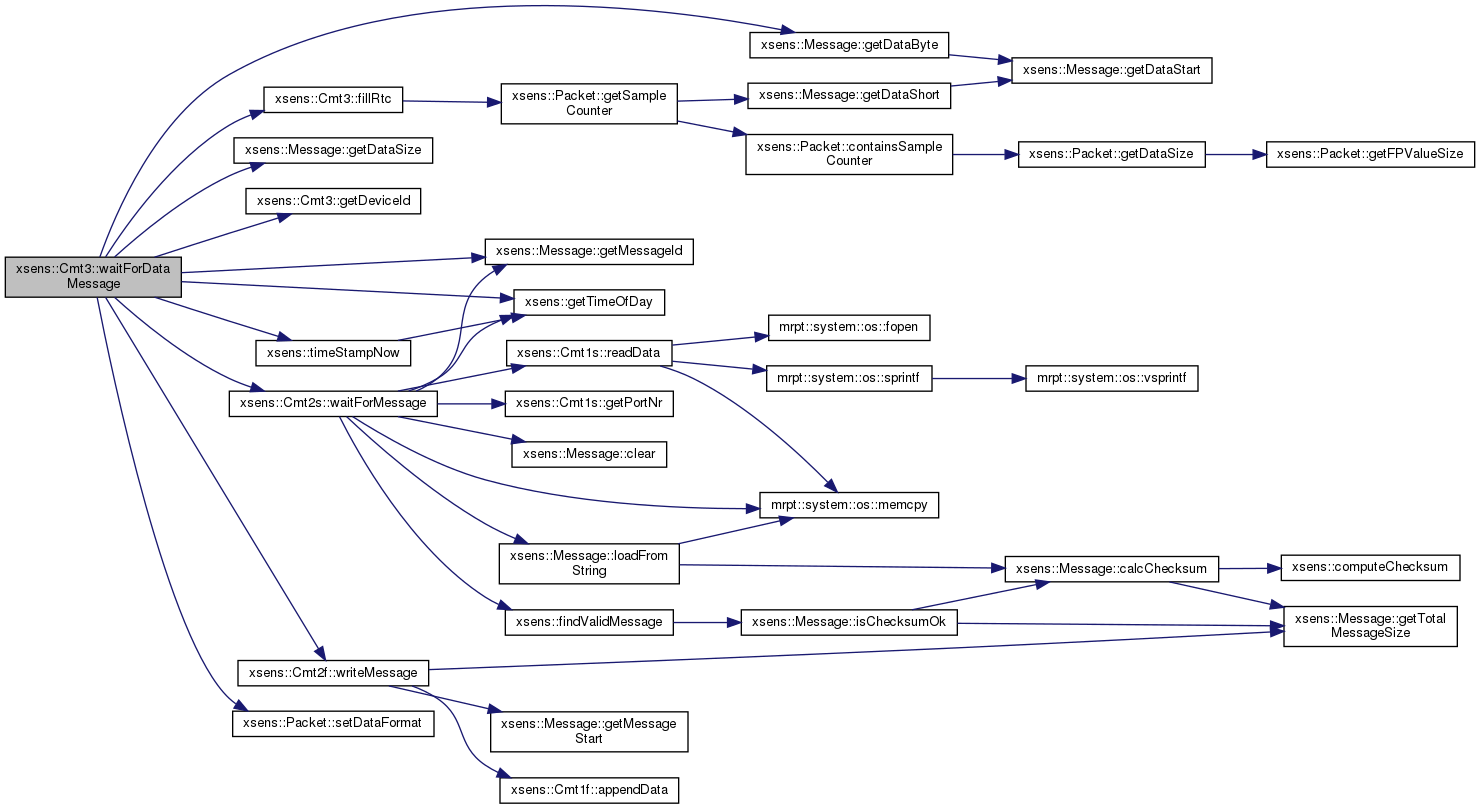
◆ writeMessageToLogFile()
| XsensResultValue xsens::Cmt3::writeMessageToLogFile | ( | const Message & | msg | ) |
Definition at line 2933 of file cmt3.cpp.
References CMT3EXITLOG, CMT3LOG, xsens::Cmt2f::isOpen(), m_lastResult, m_logFile, xsens::Cmt2f::writeMessage(), and XRV_NOFILEOPEN.
Referenced by getConfiguration(), and getEMtsData().
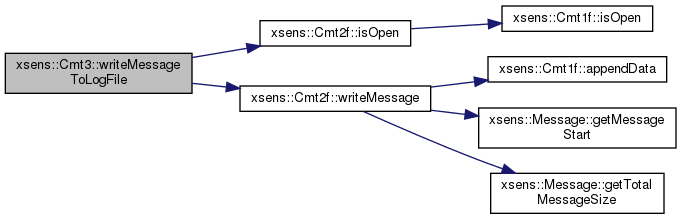

Member Data Documentation
◆ m_baudrate
|
protected |
The baudrate that was last set to be used by the port.
Definition at line 63 of file cmt3.h.
Referenced by getBaudrate(), openPort(), and setBaudrate().
◆ m_config
|
protected |
The configuration of the connected devices.
Definition at line 102 of file cmt3.h.
Referenced by Cmt3(), createLogFile(), getBusId(), getBusIdInternal(), getConfiguration(), getDeviceCount(), getDeviceId(), getDeviceMode2(), getEMtsData(), getMasterId(), getMtCount(), getMtDeviceId(), isXm(), readDataPacket(), refreshCache(), setDeviceMode2(), setGpsLeverArm(), storeXkfState(), and waitForDataMessage().
◆ m_detailedScan
|
protected |
◆ m_eMtsData
| void* xsens::Cmt3::m_eMtsData[CMT_MAX_DEVICES_PER_PORT] |
Cached eMTS data.
Definition at line 98 of file cmt3.h.
Referenced by Cmt3(), getEMtsData(), refreshCache(), and ~Cmt3().
◆ m_firstItem
|
protected |
◆ m_gotoConfigTries
|
protected |
The number of times a goto config is attempted before the function fails.
Definition at line 74 of file cmt3.h.
Referenced by Cmt3(), gotoConfig(), and setGotoConfigTries().
◆ m_lastHwError
|
protected |
Contains the last error reported by hardware.
Definition at line 89 of file cmt3.h.
Referenced by clearHwError(), getEMtsData(), getHwError(), gotoConfig(), readDataPacket(), setGpsLeverArm(), storeXkfState(), and waitForDataMessage().
◆ m_lastHwErrorDeviceId
|
protected |
Contains the Device ID of the device that caused the last hardware error.
Definition at line 92 of file cmt3.h.
Referenced by clearHwError(), getEMtsData(), getHwError(), gotoConfig(), readDataPacket(), setGpsLeverArm(), storeXkfState(), and waitForDataMessage().
◆ m_lastResult
|
mutableprotected |
The last result of an operation.
Definition at line 69 of file cmt3.h.
Referenced by closeLogFile(), closePort(), Cmt3(), createLogFile(), getAvailableScenarios(), getBatteryLevel(), getBaudrate(), getBluetoothState(), getBusId(), getBusPowerState(), getConfiguration(), getDataLength(), getDeviceId(), getDeviceMode2(), getEMtsData(), getErrorMode(), getFirmwareRevision(), getGpsLeverArm(), getGpsStatus(), getGravityMagnitude(), getHeading(), getLastResult(), getLocationId(), getLogFileName(), getLogFileReadPosition(), getLogFileSize(), getMagneticDeclination(), getMtDeviceId(), getPortNr(), getProductCode(), getScenario(), getSerialBaudrate(), getSyncInMode(), getSyncInOffset(), getSyncInSettings(), getSyncInSkipFactor(), getSyncMode(), getSyncOutMode(), getSyncOutOffset(), getSyncOutPulseWidth(), getSyncOutSettings(), getSyncOutSkipFactor(), getUtcTime(), getXmOutputMode(), gotoConfig(), gotoMeasurement(), initBus(), openLogFile(), openPort(), peekLogMessageId(), readDataPacket(), refreshCache(), requestData(), reset(), resetLogFileReadPos(), resetOrientation(), restoreFactoryDefaults(), setBaudrate(), setBluetoothState(), setBusPowerState(), setDataSource(), setDeviceMode2(), setErrorMode(), setGotoConfigTries(), setGpsLeverArm(), setGravityMagnitude(), setHeading(), setLocationId(), setLogMode(), setMagneticDeclination(), setScenario(), setSyncInMode(), setSyncInOffset(), setSyncInSettings(), setSyncInSkipFactor(), setSyncMode(), setSyncOutMode(), setSyncOutOffset(), setSyncOutPulseWidth(), setSyncOutSettings(), setSyncOutSkipFactor(), setTimeout(), setTimeoutConfig(), setTimeoutMeasurement(), setXmOutputMode(), setXmPowerOff(), storeXkfState(), waitForDataMessage(), and writeMessageToLogFile().
◆ m_logFile
|
protected |
The (optional) CMT level 2 logfile object that this class operates on.
Definition at line 47 of file cmt3.h.
Referenced by closeLogFile(), closePort(), createLogFile(), getCmt2f(), getConfiguration(), getDeviceCount(), getEMtsData(), getLogFileName(), getLogFileReadPosition(), getLogFileSize(), getMasterId(), getMtCount(), getSyncInMode(), getSyncInOffset(), getSyncInSettings(), getSyncInSkipFactor(), getSyncOutMode(), getSyncOutOffset(), getSyncOutPulseWidth(), getSyncOutSettings(), getSyncOutSkipFactor(), gotoConfig(), gotoMeasurement(), isLogFileOpen(), openLogFile(), openPort(), peekLogMessageId(), readDataPacket(), refreshCache(), reset(), resetLogFileReadPos(), setBaudrate(), setDataSource(), setDeviceMode2(), setGpsLeverArm(), setLogMode(), setSyncInMode(), setSyncInOffset(), setSyncInSettings(), setSyncInSkipFactor(), setSyncOutMode(), setSyncOutOffset(), setSyncOutPulseWidth(), setSyncOutSettings(), setSyncOutSkipFactor(), storeXkfState(), waitForDataMessage(), writeMessageToLogFile(), and ~Cmt3().
◆ m_logging
|
protected |
Indicates whether to write all received messages to the logfile or not, automatically set to true by createLogFile.
Definition at line 87 of file cmt3.h.
Referenced by closeLogFile(), closePort(), Cmt3(), createLogFile(), getConfiguration(), getEMtsData(), getSyncInMode(), getSyncInOffset(), getSyncInSettings(), getSyncInSkipFactor(), getSyncOutMode(), getSyncOutOffset(), getSyncOutPulseWidth(), getSyncOutSettings(), getSyncOutSkipFactor(), gotoConfig(), gotoMeasurement(), isLogging(), openLogFile(), openPort(), readDataPacket(), refreshCache(), reset(), setBaudrate(), setDataSource(), setDeviceMode2(), setGpsLeverArm(), setLogMode(), setSyncInMode(), setSyncInOffset(), setSyncInSettings(), setSyncInSkipFactor(), setSyncOutMode(), setSyncOutOffset(), setSyncOutPulseWidth(), setSyncOutSettings(), setSyncOutSkipFactor(), storeXkfState(), and waitForDataMessage().
◆ m_measuring
|
protected |
Keeps track of whether the connected device is measuring or being configured.
Definition at line 77 of file cmt3.h.
Referenced by closePort(), Cmt3(), gotoConfig(), gotoMeasurement(), openPort(), refreshCache(), reset(), setBaudrate(), setTimeoutConfig(), and setTimeoutMeasurement().
◆ m_period
|
protected |
The sample period of the port.
Definition at line 53 of file cmt3.h.
Referenced by Cmt3(), fillRtc(), getDeviceMode2(), getSampleFrequency(), refreshCache(), and setDeviceMode2().
◆ m_readFromFile
|
protected |
Indicates whether to read from the log file or from the serial port.
Definition at line 82 of file cmt3.h.
Referenced by closePort(), Cmt3(), getEMtsData(), openLogFile(), peekLogMessageId(), readDataPacket(), setDataSource(), and setLogMode().
◆ m_rtcCount
|
protected |
◆ m_rtcInitialized
|
protected |
Indicates if the rtc is initialised or not.
Definition at line 84 of file cmt3.h.
Referenced by Cmt3(), fillRtc(), gotoMeasurement(), and openPort().
◆ m_rtcLastSc
|
protected |
◆ m_rtcMsPerSample
|
protected |
◆ m_rtcStart
|
protected |
◆ m_serial
|
protected |
The (optional) CMT level 2 serial object that this class operates on.
Definition at line 44 of file cmt3.h.
Referenced by closePort(), createLogFile(), getBaudrate(), getCmt2s(), getConfiguration(), getDeviceCount(), getEMtsData(), getMasterId(), getMtCount(), getPortNr(), getSyncInMode(), getSyncInOffset(), getSyncInSettings(), getSyncInSkipFactor(), getSyncOutMode(), getSyncOutOffset(), getSyncOutPulseWidth(), getSyncOutSettings(), getSyncOutSkipFactor(), gotoConfig(), gotoMeasurement(), initBus(), isPortOpen(), openLogFile(), openPort(), readDataPacket(), refreshCache(), requestData(), reset(), setBaudrate(), setDataSource(), setDeviceMode2(), setGpsLeverArm(), setSyncInMode(), setSyncInOffset(), setSyncInSettings(), setSyncInSkipFactor(), setSyncOutMode(), setSyncOutOffset(), setSyncOutPulseWidth(), setSyncOutSettings(), setSyncOutSkipFactor(), setTimeout(), setTimeoutConfig(), setTimeoutMeasurement(), setXmPowerOff(), storeXkfState(), waitForDataMessage(), and ~Cmt3().
◆ m_skip
|
protected |
The skip factor of the port.
Definition at line 55 of file cmt3.h.
Referenced by Cmt3(), fillRtc(), getDeviceMode2(), getSampleFrequency(), refreshCache(), and setDeviceMode2().
◆ m_timeoutConf
|
protected |
The config mode timeout.
Definition at line 65 of file cmt3.h.
Referenced by Cmt3(), getTimeoutConfig(), gotoConfig(), openPort(), and setTimeoutConfig().
◆ m_timeoutMeas
|
protected |
The measurement mode timeout.
Definition at line 67 of file cmt3.h.
Referenced by Cmt3(), getTimeoutMeasurement(), gotoMeasurement(), openPort(), setTimeoutMeasurement(), and waitForDataMessage().
◆ m_useRtc
| bool xsens::Cmt3::m_useRtc |
Indicates if the RTC should be computed or not (to save CPU time).
Definition at line 96 of file cmt3.h.
Referenced by Cmt3(), readDataPacket(), and waitForDataMessage().