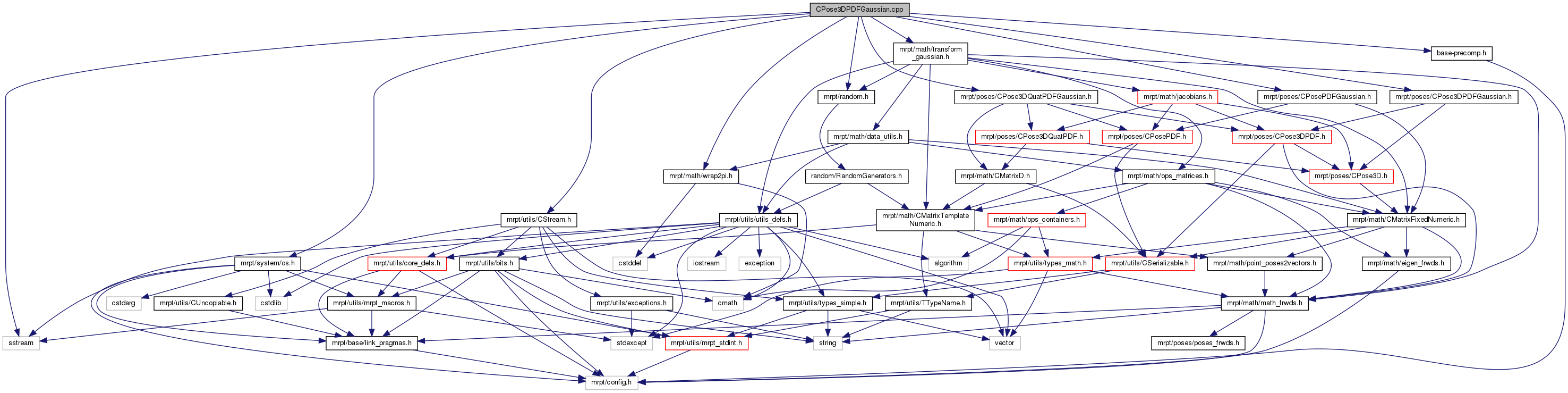
#include "base-precomp.h"#include <mrpt/random.h>#include <mrpt/math/transform_gaussian.h>#include <mrpt/poses/CPose3DPDFGaussian.h>#include <mrpt/poses/CPose3DQuatPDFGaussian.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/math/wrap2pi.h>#include <mrpt/system/os.h>#include <mrpt/utils/CStream.h>#include <sstream>
Include dependency graph for CPose3DPDFGaussian.cpp:
Go to the source code of this file.
Functions | |
| void | aux_posequat2poseypr (const CArrayDouble< 7 > &x, const double &dummy, CArrayDouble< 6 > &y) |
Function Documentation
◆ aux_posequat2poseypr()
| void aux_posequat2poseypr | ( | const CArrayDouble< 7 > & | x, |
| const double & | dummy, | ||
| CArrayDouble< 6 > & | y | ||
| ) |
Definition at line 100 of file CPose3DPDFGaussian.cpp.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::poses::CPose3DPDFGaussian::copyFrom().