#include <mrpt/vision/CFeature.h>#include <mrpt/img/CImage.h>#include <mrpt/img/TStereoCamera.h>#include <mrpt/math/CMatrixTemplate.h>#include <mrpt/config/CLoadableOptions.h>#include <mrpt/tfest/TMatchingPair.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/vision/types.h>#include <mrpt/vision/chessboard_camera_calib.h>#include <mrpt/obs/obs_frwds.h>
Include dependency graph for vision/include/mrpt/vision/utils.h:
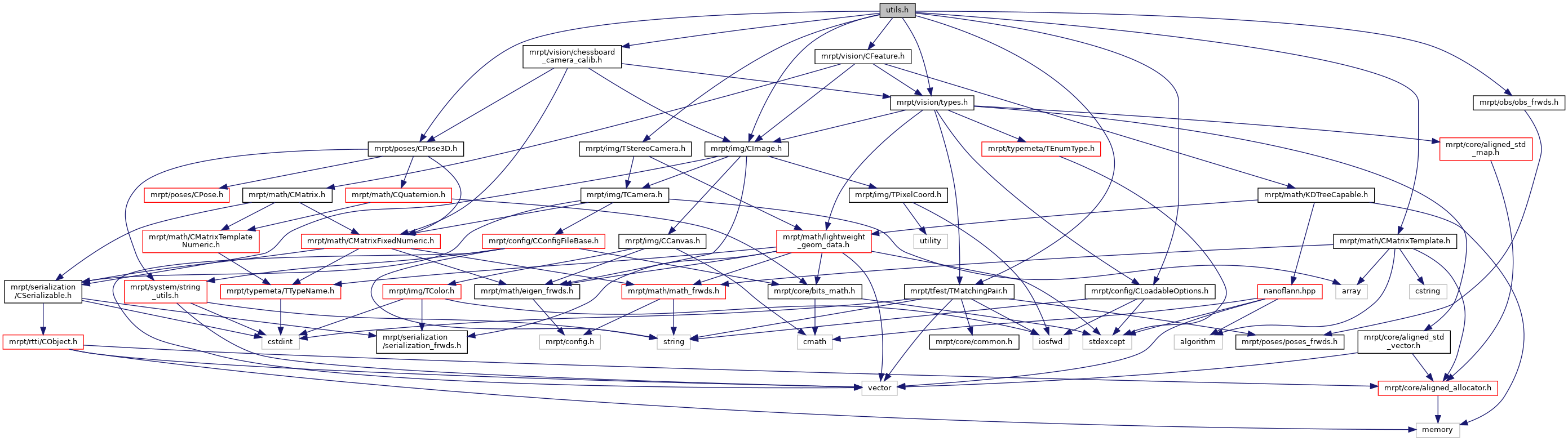
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
Functions | |
| void | mrpt::vision::openCV_cross_correlation (const mrpt::img::CImage &img, const mrpt::img::CImage &patch_img, size_t &x_max, size_t &y_max, double &max_val, int x_search_ini=-1, int y_search_ini=-1, int x_search_size=-1, int y_search_size=-1) |
| Computes the correlation between this image and another one, encapsulating the openCV function cvMatchTemplate This implementation reduced computation time. More... | |
| void | mrpt::vision::flip (mrpt::img::CImage &img) |
| Invert an image using OpenCV function. More... | |
| mrpt::math::TPoint3D | mrpt::vision::pixelTo3D (const mrpt::img::TPixelCoordf &xy, const mrpt::math::CMatrixDouble33 &A) |
| Extract a UNITARY 3D vector in the direction of a 3D point, given from its (x,y) pixels coordinates, and the camera intrinsic coordinates. More... | |
| mrpt::math::CMatrixDouble33 | mrpt::vision::buildIntrinsicParamsMatrix (const double focalLengthX, const double focalLengthY, const double centerX, const double centerY) |
| Builds the intrinsic parameters matrix A from parameters: More... | |
| mrpt::math::CMatrixDouble33 | mrpt::vision::defaultIntrinsicParamsMatrix (unsigned int camIndex=0, unsigned int resolutionX=320, unsigned int resolutionY=240) |
| Returns the stored, default intrinsic params matrix for a given camera: More... | |
| void | mrpt::vision::deleteRepeatedFeats (CFeatureList &list) |
| Explore the feature list and removes features which are in the same coordinates. More... | |
| void | mrpt::vision::rowChecking (CFeatureList &leftList, CFeatureList &rightList, float threshold=1.0) |
| Search for correspondences which are not in the same row and deletes them. More... | |
| void | mrpt::vision::getDispersion (const CFeatureList &list, mrpt::math::CVectorFloat &std, mrpt::math::CVectorFloat &mean) |
| Computes the dispersion of the features in the image. More... | |
| double | mrpt::vision::computeMsd (const mrpt::tfest::TMatchingPairList &list, const poses::CPose3D &Rt) |
| Computes the mean squared distance between a set of 3D correspondences ... More... | |
| void | mrpt::vision::cloudsToMatchedList (const mrpt::obs::CObservationVisualLandmarks &cloud1, const mrpt::obs::CObservationVisualLandmarks &cloud2, mrpt::tfest::TMatchingPairList &outList) |
| Transform two clouds of 3D points into a matched list of points ... More... | |
| float | mrpt::vision::computeMainOrientation (const mrpt::img::CImage &image, unsigned int x, unsigned int y) |
| Computes the main orientation of a set of points with an image (for using in SIFT-based algorithms) More... | |
| void | mrpt::vision::normalizeImage (const mrpt::img::CImage &image, mrpt::img::CImage &nimage) |
| Normalizes the brigthness and contrast of an image by setting its mean value to zero and its standard deviation to unit. More... | |
| size_t | mrpt::vision::matchFeatures (const CFeatureList &list1, const CFeatureList &list2, CMatchedFeatureList &matches, const TMatchingOptions &options=TMatchingOptions(), const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Find the matches between two lists of features which must be of the same type. More... | |
| void | mrpt::vision::generateMask (const CMatchedFeatureList &mList, mrpt::math::CMatrixBool &mask1, mrpt::math::CMatrixBool &mask2, int wSize=10) |
| Calculates the Sum of Absolutes Differences (range [0,1]) between two patches. More... | |
| double | mrpt::vision::computeSAD (const mrpt::img::CImage &patch1, const mrpt::img::CImage &patch2) |
| Calculates the Sum of Absolutes Differences (range [0,1]) between two patches. More... | |
| void | mrpt::vision::addFeaturesToImage (const mrpt::img::CImage &inImg, const CFeatureList &theList, mrpt::img::CImage &outImg) |
| Draw rectangles around each of the features on a copy of the input image. More... | |
| void | mrpt::vision::projectMatchedFeatures (const CMatchedFeatureList &matches, const mrpt::img::TStereoCamera &stereo_camera, std::vector< mrpt::math::TPoint3D > &out_points) |
| void | mrpt::vision::projectMatchedFeatures (const CFeatureList &leftList, const CFeatureList &rightList, std::vector< mrpt::math::TPoint3D > &vP3D, const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Computes the 3D position of a set of matched features from their coordinates in the images. More... | |
| void | mrpt::vision::projectMatchedFeature (const CFeature::Ptr &leftFeat, const CFeature::Ptr &rightFeat, mrpt::math::TPoint3D &p3D, const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Computes the 3D position of a particular matched feature. More... | |
| void | mrpt::vision::projectMatchedFeatures (CMatchedFeatureList &mfList, const TStereoSystemParams ¶m, mrpt::maps::CLandmarksMap &landmarks) |
| Project a list of matched features into the 3D space, using the provided parameters of the stereo system. More... | |
| void | mrpt::vision::projectMatchedFeatures (CFeatureList &leftList, CFeatureList &rightList, const TStereoSystemParams ¶m, mrpt::maps::CLandmarksMap &landmarks) |
| Project a pair of feature lists into the 3D space, using the provided options for the stereo system. More... | |
| void | mrpt::vision::StereoObs2BRObs (const mrpt::obs::CObservationStereoImages &inObs, const std::vector< double > &sg, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a stereo images observation into a bearing and range observation. More... | |
| void | mrpt::vision::StereoObs2BRObs (const CMatchedFeatureList &inMatches, const mrpt::math::CMatrixDouble33 &intrinsicParams, const double &baseline, const mrpt::poses::CPose3D &sensorPose, const std::vector< double > &sg, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a matched feature list into a bearing and range observation (some of the stereo camera system must be provided). More... | |
| void | mrpt::vision::StereoObs2BRObs (const mrpt::obs::CObservationVisualLandmarks &inObs, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a CObservationVisualLandmarks into a bearing and range observation (without any covariances). More... | |
| void | mrpt::vision::computeStereoRectificationMaps (const mrpt::img::TCamera &cam1, const mrpt::img::TCamera &cam2, const mrpt::poses::CPose3D &rightCameraPose, void *outMap1x, void *outMap1y, void *outMap2x, void *outMap2y) |
| Computes a pair of x-and-y maps for stereo rectification from a pair of cameras and the relative pose of the second one wrt the first one. More... | |