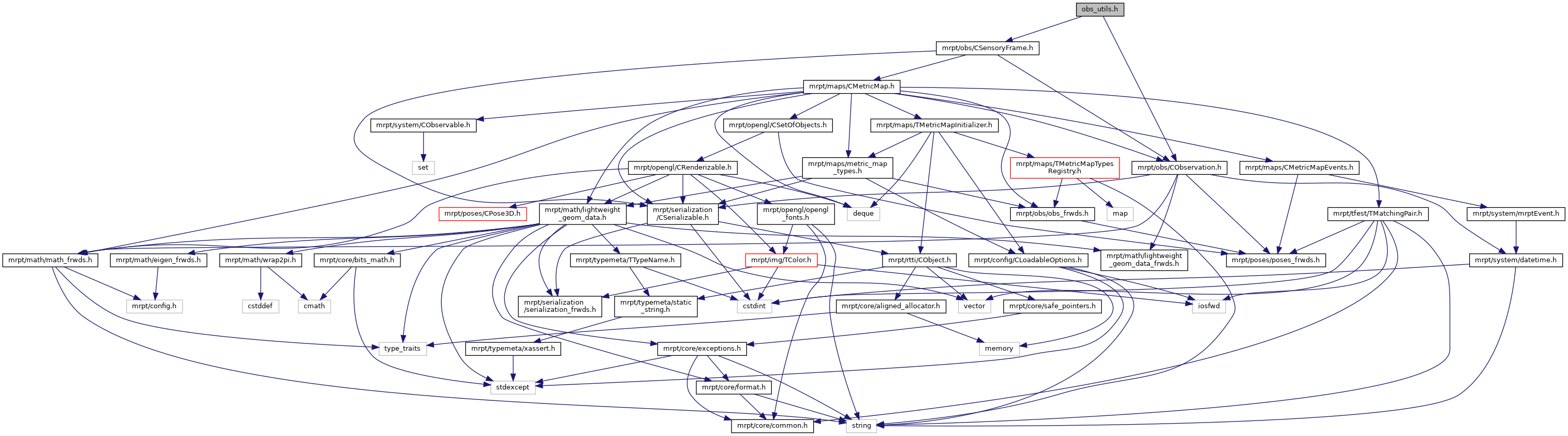
Include dependency graph for obs_utils.h:
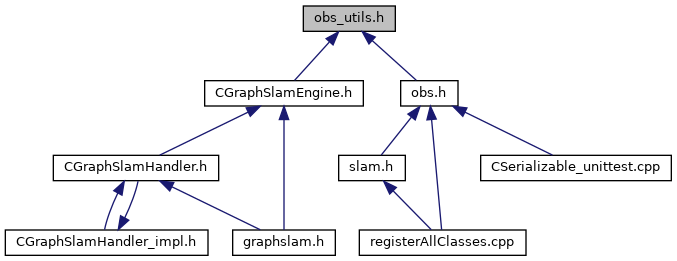
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
| mrpt::obs::utils | |
Functions | |
| template<class OBSERVATION_T > | |
| OBSERVATION_T::Ptr | mrpt::obs::utils::getObservation (mrpt::obs::CSensoryFrame::Ptr &observations, mrpt::obs::CObservation::Ptr &observation, bool priority_to_sf=true) |
| Given an mrpt::obs::CSensoryFrame and a mrpt::obs::CObservation pointer if a OBSERVATION_T type observation is included and return a pointer to that instance. More... | |