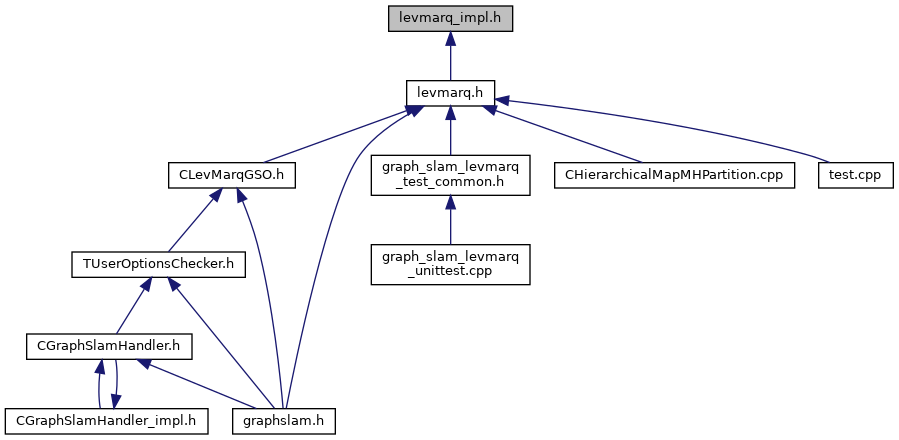
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphslam | |
| SLAM methods related to graphs of pose constraints. | |
| mrpt::graphslam::detail | |
| Internal auxiliary classes. | |
Functions | |
| template<class GRAPH_T > | |
| double | mrpt::graphslam::computeJacobiansAndErrors (const GRAPH_T &graph, const std::vector< typename graphslam_traits< GRAPH_T >::observation_info_t > &lstObservationData, typename graphslam_traits< GRAPH_T >::map_pairIDs_pairJacobs_t &lstJacobians, mrpt::aligned_std_vector< typename graphslam_traits< GRAPH_T >::Array_O > &errs) |