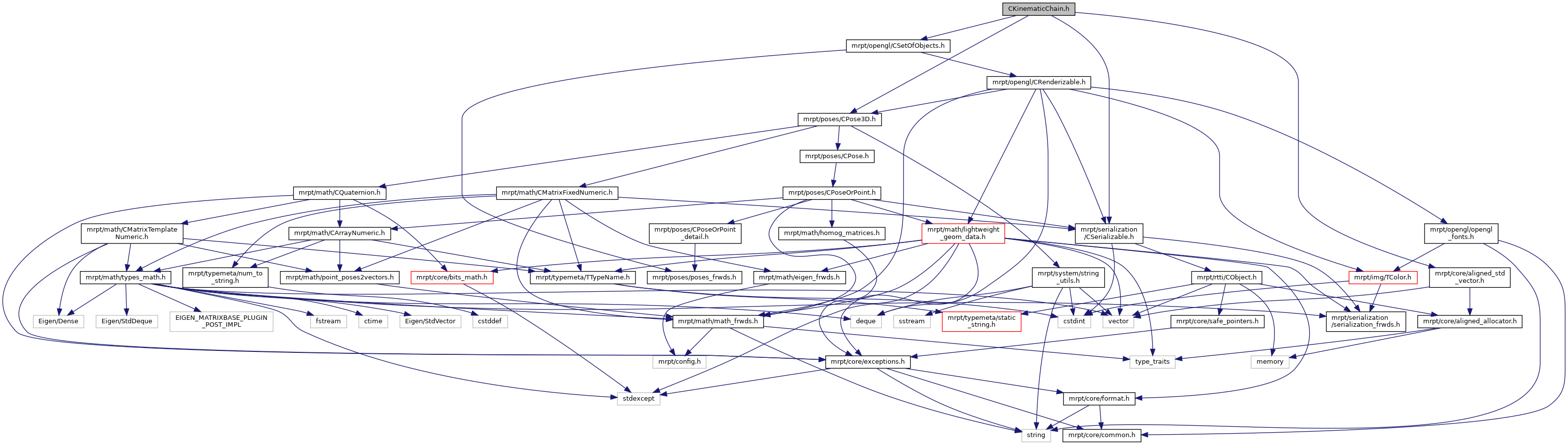
#include <mrpt/poses/CPose3D.h>#include <mrpt/serialization/CSerializable.h>#include <mrpt/opengl/CSetOfObjects.h>#include <mrpt/core/aligned_std_vector.h>
Include dependency graph for CKinematicChain.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::kinematics::TKinematicLink |
| An individual kinematic chain element (one link) which builds up a CKinematicChain. More... | |
| class | mrpt::kinematics::CKinematicChain |
| A open-loop kinematic chain model, suitable to robotic manipulators. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::kinematics | |
| mrpt::typemeta | |