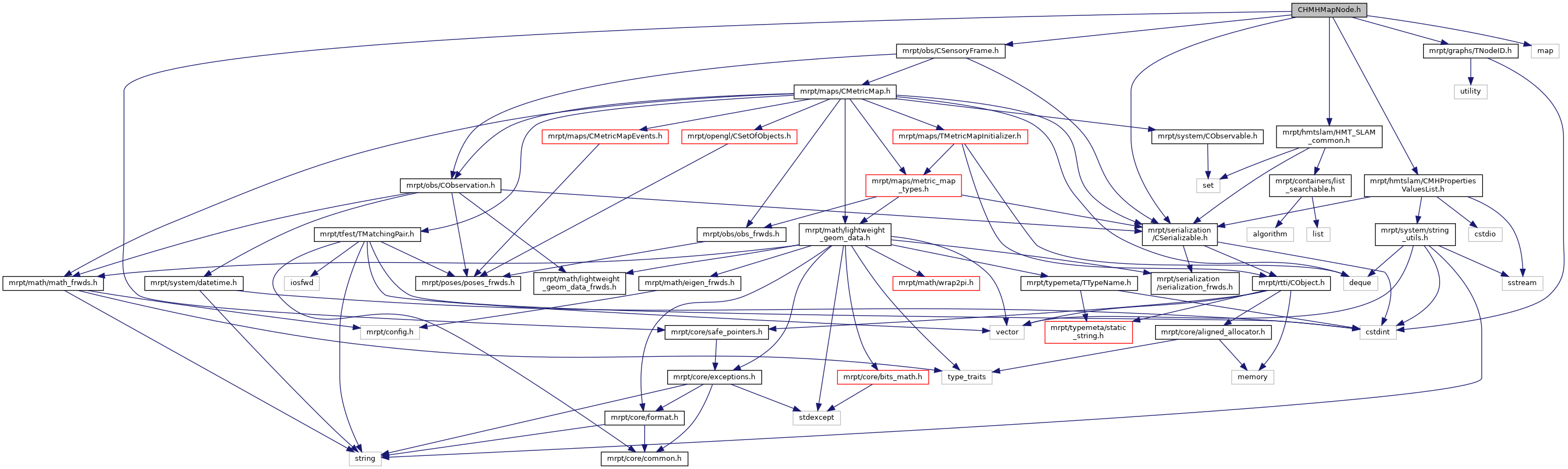
#include <mrpt/core/safe_pointers.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/hmtslam/HMT_SLAM_common.h>#include <mrpt/serialization/CSerializable.h>#include <mrpt/hmtslam/CMHPropertiesValuesList.h>#include <mrpt/graphs/TNodeID.h>#include <map>
Include dependency graph for CHMHMapNode.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::hmtslam::CHMHMapNode |
| A class for representing a node in a hierarchical, multi-hypothesis map. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hmtslam | |
| Classes related to the implementation of Hybrid Metric Topological (HMT) SLAM. | |
Typedefs | |
| using | mrpt::hmtslam::TNodeList = std::map< CHMHMapNode::TNodeID, std::shared_ptr< CHMHMapNode > > |
| A map between node IDs and nodes (used in HMT-SLAM). More... | |
| using | mrpt::hmtslam::TNodeIDList = mrpt::containers::list_searchable< CHMHMapNode::TNodeID > |
| using | mrpt::hmtslam::TNodeIDSet = std::set< CHMHMapNode::TNodeID > |
| using | mrpt::hmtslam::TPairNodeIDs = std::pair< CHMHMapNode::TNodeID, CHMHMapNode::TNodeID > |