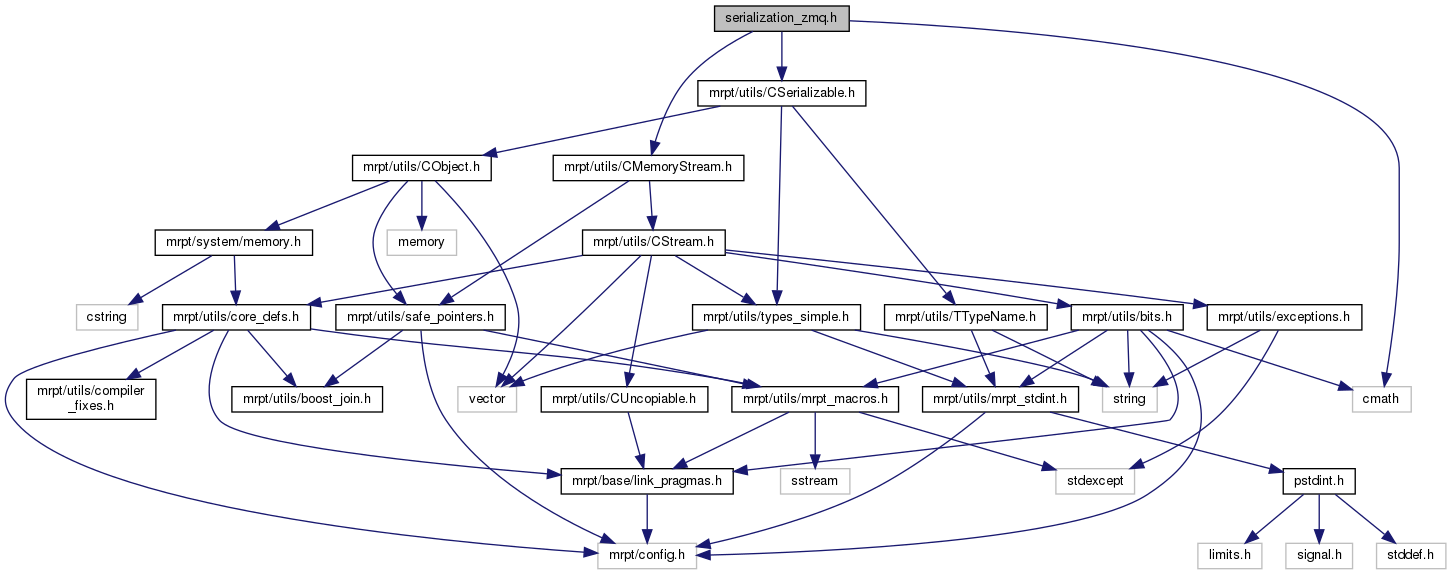
Include dependency graph for serialization_zmq.h:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
| mrpt::utils::internal | |
Functions | |
| template<typename ZMQ_SOCKET_TYPE > | |
| void | mrpt::utils::mrpt_send_to_zmq (ZMQ_SOCKET_TYPE zmq_socket, const mrpt::utils::CSerializable &obj, const size_t max_packet_len=0) |
| Send an MRPT object to a ZMQ socket. More... | |
| template<typename ZMQ_SOCKET_TYPE , typename VECTOR_MSG_T > | |
| bool | mrpt::utils::mrpt_recv_from_zmq_buf (ZMQ_SOCKET_TYPE zmq_socket, VECTOR_MSG_T &out_lst_msgs, mrpt::utils::CMemoryStream &target_buf, bool dont_wait, size_t *rx_obj_length_in_bytes) |
| Users may normally call mrpt_recv_from_zmq() and mrpt_recv_from_zmq_into(). More... | |
| template<typename VECTOR_MSG_T > | |
| void | mrpt::utils::internal::free_zmq_msg_lst (VECTOR_MSG_T &lst_msgs) |
| template<typename ZMQ_SOCKET_TYPE > | |
| mrpt::utils::CSerializablePtr | mrpt::utils::mrpt_recv_from_zmq (ZMQ_SOCKET_TYPE zmq_socket, bool dont_wait=false, size_t *rx_obj_length_in_bytes=NULL) |
| Receives an MRPT object from a ZMQ socket, determining the type of the object on-the-fly. More... | |
| template<typename ZMQ_SOCKET_TYPE > | |
| bool | mrpt::utils::mrpt_recv_from_zmq_into (ZMQ_SOCKET_TYPE zmq_socket, mrpt::utils::CSerializable &target_object, bool dont_wait=false, size_t *rx_obj_length_in_bytes=NULL) |
| Like mrpt_recv_from_zmq() but without dynamically allocating the received object, more efficient to use if the type of the received object is known in advance. More... | |