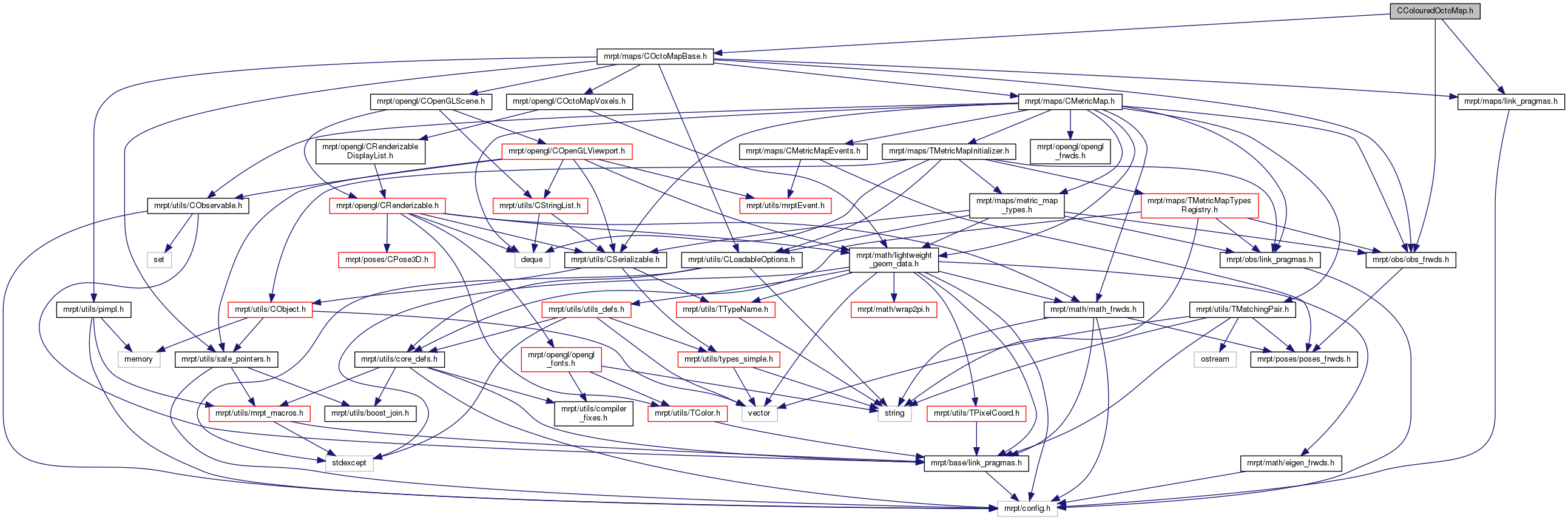
#include <mrpt/maps/COctoMapBase.h>#include <mrpt/obs/obs_frwds.h>#include <mrpt/maps/link_pragmas.h>
Include dependency graph for maps/CColouredOctoMap.h:
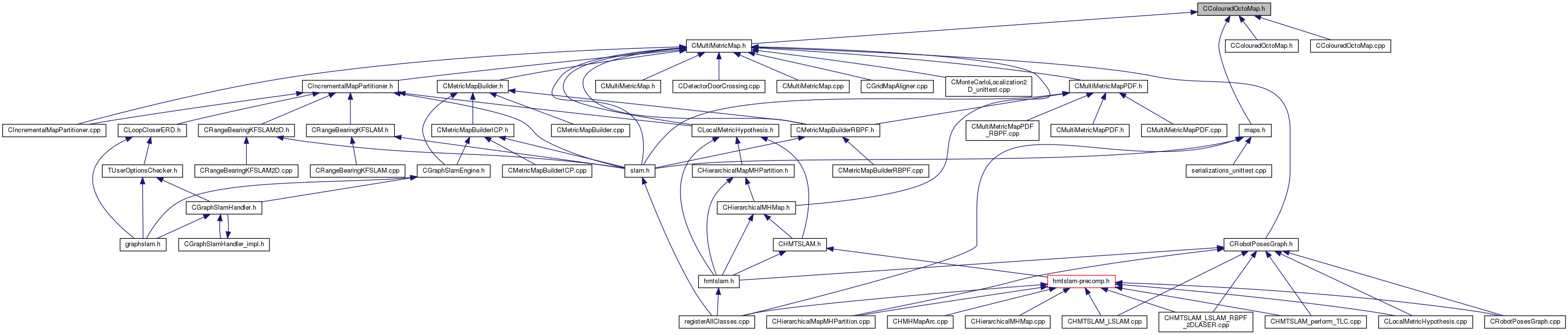
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::maps::CColouredOctoMap |
| A three-dimensional probabilistic occupancy grid, implemented as an octo-tree with the "octomap" C++ library. More... | |
| struct | mrpt::maps::CColouredOctoMap::TMapDefinitionBase |
| struct | mrpt::maps::CColouredOctoMap::TMapDefinition |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CColouredOctoMapPtr &pObj) |