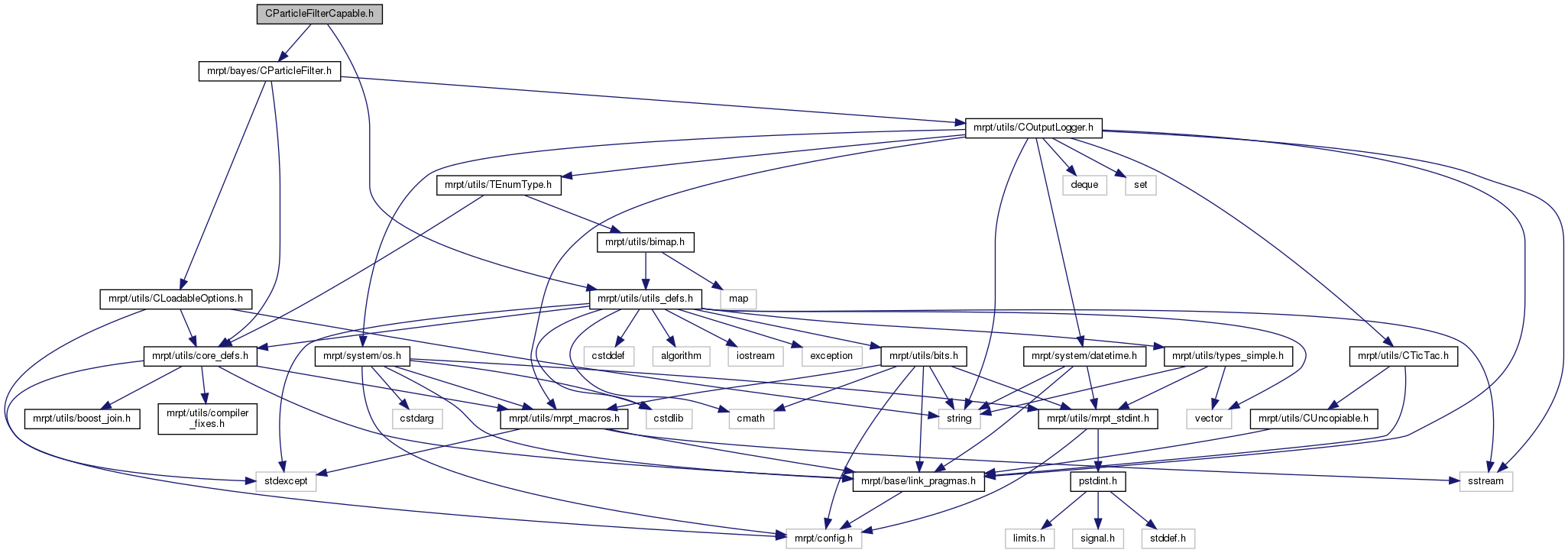
Include dependency graph for CParticleFilterCapable.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::bayes::CParticleFilterCapable |
| This virtual class defines the interface that any particles based PDF class must implement in order to be executed by a mrpt::bayes::CParticleFilter. More... | |
| struct | mrpt::bayes::CParticleFilterCapable::TFastDrawAuxVars |
| Auxiliary vectors, see CParticleFilterCapable::prepareFastDrawSample for more information. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::bayes | |
| The namespace for Bayesian filtering algorithm: different particle filters and Kalman filter algorithms. | |
Macros | |
| #define | INVALID_LIKELIHOOD_VALUE (-1e300) |
Macro Definition Documentation
◆ INVALID_LIKELIHOOD_VALUE
| #define INVALID_LIKELIHOOD_VALUE (-1e300) |
Definition at line 19 of file CParticleFilterCapable.h.