#include <mrpt/math/wrap2pi.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/round.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/math/CPolygon.h>#include <mrpt/utils/mrpt_stdint.h>#include <mrpt/nav/link_pragmas.h>#include <mrpt/nav/holonomic/ClearanceDiagram.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/kinematics/CVehicleVelCmd.h>
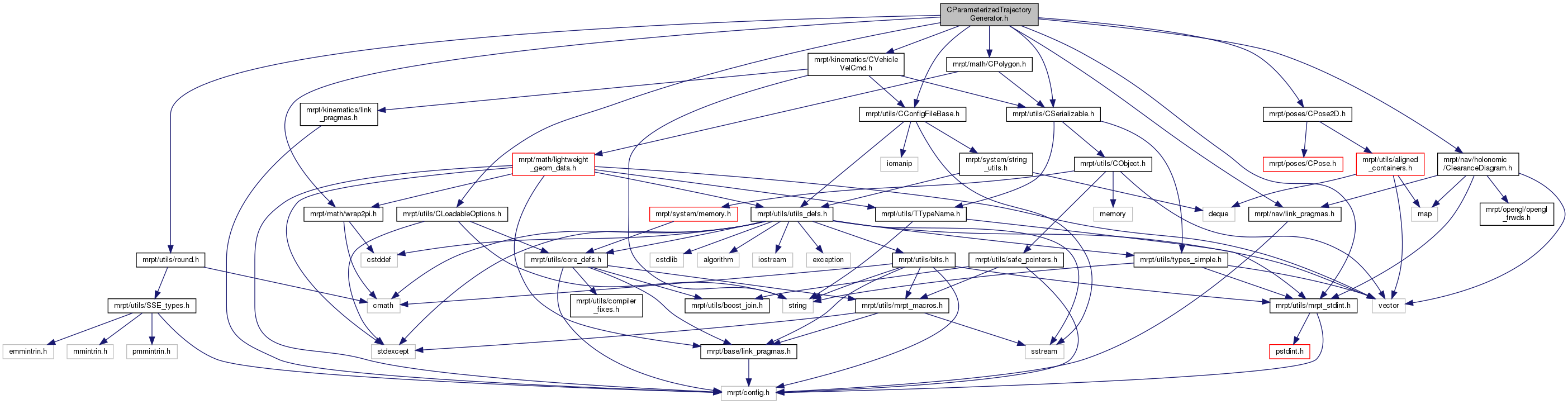
Include dependency graph for CParameterizedTrajectoryGenerator.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::nav::CParameterizedTrajectoryGenerator |
| This is the base class for any user-defined PTG. More... | |
| struct | mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState |
| Dynamic state that may affect the PTG path parameterization. More... | |
| class | mrpt::nav::CPTG_RobotShape_Polygonal |
| Base class for all PTGs using a 2D polygonal robot shape model. More... | |
| class | mrpt::nav::CPTG_RobotShape_Circular |
| Base class for all PTGs using a 2D circular robot shape model. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::opengl | |
| The namespace for 3D scene representation and rendering. | |
| mrpt::nav | |
Typedefs | |
| typedef std::vector< mrpt::nav::CParameterizedTrajectoryGenerator * > | mrpt::nav::TListPTGs |
| A list of PTGs (bare pointers) More... | |
| typedef std::vector< mrpt::nav::CParameterizedTrajectoryGeneratorPtr > | mrpt::nav::TListPTGPtr |
| A list of PTGs (smart pointers) More... | |
Enumerations | |
| enum | mrpt::nav::PTG_collision_behavior_t { mrpt::nav::COLL_BEH_BACK_AWAY = 0, mrpt::nav::COLL_BEH_STOP } |
| Defines behaviors for where there is an obstacle inside the robot shape right at the beginning of a PTG trajectory. More... | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::nav::operator>> (mrpt::utils::CStream &in, CParameterizedTrajectoryGeneratorPtr &pObj) |