Detailed Description
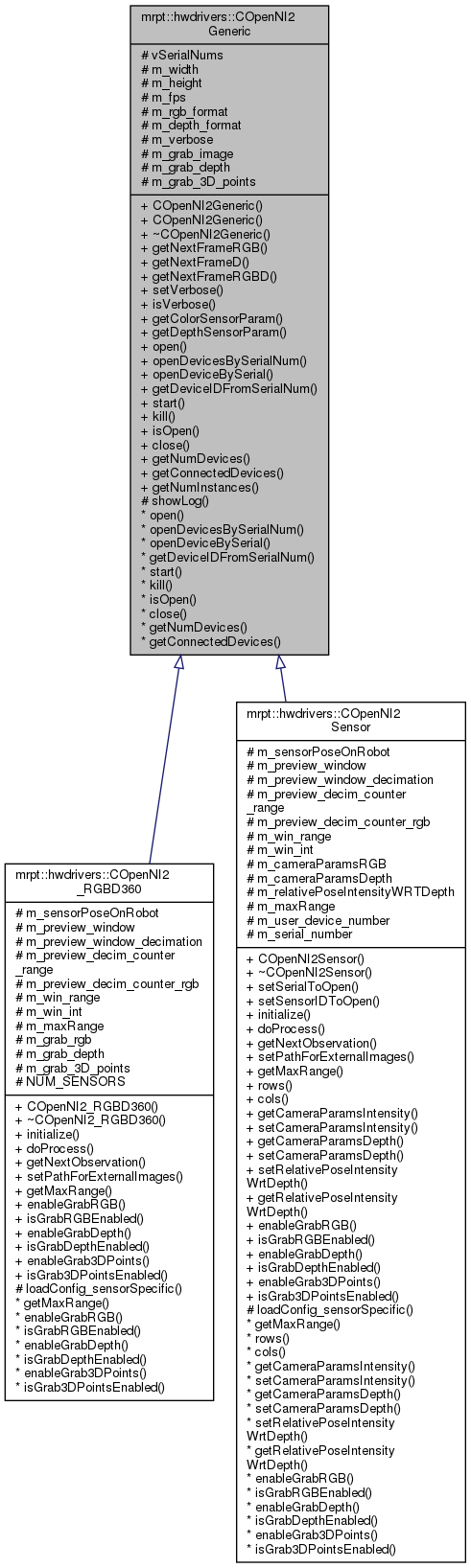
An abstract class for accessing OpenNI2 compatible sensors.
This class permits to access several sensors simultaneously. The same options (resolution, fps, etc.) are used for every sensor.
More references to read:
Definition at line 24 of file COpenNI2Generic.h.
#include <mrpt/hwdrivers/COpenNI2Generic.h>
Classes | |
| class | CDevice |
Public Member Functions | |
| COpenNI2Generic () | |
| Default ctor (width=640, height=480, fps=30) More... | |
| COpenNI2Generic (int width, int height, float fps=30.0f, bool open_streams_now=true) | |
| Ctor. More... | |
| ~COpenNI2Generic () | |
| Default ctor. More... | |
| void | getNextFrameRGB (mrpt::img::CImage &rgb_img, mrpt::system::TTimeStamp ×tamp, bool &there_is_obs, bool &hardware_error, unsigned sensor_id=0) |
| The main data retrieving function, to be called after calling loadConfig() and initialize(). More... | |
| void | getNextFrameD (mrpt::math::CMatrix &depth_img, mrpt::system::TTimeStamp ×tamp, bool &there_is_obs, bool &hardware_error, unsigned sensor_id=0) |
| The main data retrieving function, to be called after calling loadConfig() and initialize(). More... | |
| void | getNextFrameRGBD (mrpt::obs::CObservation3DRangeScan &out_obs, bool &there_is_obs, bool &hardware_error, unsigned sensor_id=0) |
| The main data retrieving function, to be called after calling loadConfig() and initialize(). More... | |
| void | setVerbose (bool verbose) |
| bool | isVerbose () const |
| bool | getColorSensorParam (mrpt::img::TCamera ¶m, unsigned sensor_id=0) const |
| bool | getDepthSensorParam (mrpt::img::TCamera ¶m, unsigned sensor_id=0) const |
Open/Close device methods | |
| void | open (unsigned sensor_id=0) |
| Try to open the camera (all the parameters [resolution,fps,...] must be set before calling this) - users may also call initialize(), which in turn calls this method. More... | |
| unsigned int | openDevicesBySerialNum (const std::set< unsigned > &vSerialRequired) |
| Open a set of RGBD devices specified by their serial number. More... | |
| unsigned int | openDeviceBySerial (const unsigned int SerialRequired) |
| Open a RGBD device specified by its serial number. More... | |
| bool | getDeviceIDFromSerialNum (const unsigned int SerialRequired, int &sensor_id) const |
| Get the ID of the device corresponding to 'SerialRequired'. More... | |
| bool | start () |
| Open all sensor streams (normally called automatically at constructor, no need to call it manually). More... | |
| void | kill () |
| Kill the OpenNI2 driver. More... | |
| bool | isOpen (const unsigned sensor_id) const |
| Whether there is a working connection to the sensor. More... | |
| void | close (unsigned sensor_id=0) |
| Close the connection to the sensor (no need to call it manually unless desired for some reason, since it's called at destructor. More... | |
| int | getNumDevices () const |
| The number of available devices at initialization. More... | |
| int | getConnectedDevices () |
| Get a list of the connected OpenNI2 sensors. More... | |
Static Public Member Functions | |
| static int | getNumInstances () |
| Get the number of OpenNI2 cameras currently open via COpenNI2Generic. More... | |
Protected Member Functions | |
| void | showLog (const std::string &message) const |
Protected Attributes | |
| std::vector< int > | vSerialNums |
| A vector with the serial numbers of the available devices. More... | |
| int | m_width |
| The same options (width, height and fps) are set for all the sensors. More... | |
| int | m_height |
| float | m_fps |
| int | m_rgb_format |
| int | m_depth_format |
| bool | m_verbose |
| bool | m_grab_image |
| The data that the RGBD sensors can return. More... | |
| bool | m_grab_depth |
| bool | m_grab_3D_points |
Constructor & Destructor Documentation
◆ COpenNI2Generic() [1/2]
| COpenNI2Generic::COpenNI2Generic | ( | ) |
Default ctor (width=640, height=480, fps=30)
Definition at line 63 of file COpenNI2Generic.cpp.
References mrpt::format(), m_verbose, start(), and THROW_EXCEPTION.
◆ COpenNI2Generic() [2/2]
| COpenNI2Generic::COpenNI2Generic | ( | int | width, |
| int | height, | ||
| float | fps = 30.0f, |
||
| bool | open_streams_now = true |
||
| ) |
Ctor.
- See also
- start()
Definition at line 88 of file COpenNI2Generic.cpp.
References mrpt::format(), m_verbose, start(), and THROW_EXCEPTION.
◆ ~COpenNI2Generic()
| COpenNI2Generic::~COpenNI2Generic | ( | ) |
Default ctor.
Definition at line 143 of file COpenNI2Generic.cpp.
References kill(), and numInstances().
Member Function Documentation
◆ close()
| void COpenNI2Generic::close | ( | unsigned | sensor_id = 0 | ) |
Close the connection to the sensor (no need to call it manually unless desired for some reason, since it's called at destructor.
Definition at line 402 of file COpenNI2Generic.cpp.
References getNumDevices(), MRPT_UNUSED_PARAM, THROW_EXCEPTION, vDevices, and vDevices_mx.
◆ getColorSensorParam()
| bool COpenNI2Generic::getColorSensorParam | ( | mrpt::img::TCamera & | param, |
| unsigned | sensor_id = 0 |
||
| ) | const |
Definition at line 545 of file COpenNI2Generic.cpp.
References mrpt::hwdrivers::COpenNI2Generic::CDevice::COLOR_STREAM, isOpen(), MRPT_UNUSED_PARAM, THROW_EXCEPTION, vDevices, and vDevices_mx.
◆ getConnectedDevices()
| int COpenNI2Generic::getConnectedDevices | ( | ) |
Get a list of the connected OpenNI2 sensors.
This method can or cannot be implemented in the derived class, depending on the need for it.
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Definition at line 172 of file COpenNI2Generic.cpp.
References mrpt::format(), getNumDevices(), m_depth_format, m_rgb_format, m_verbose, showLog(), THROW_EXCEPTION, vDevices, and vDevices_mx.
◆ getDepthSensorParam()
| bool COpenNI2Generic::getDepthSensorParam | ( | mrpt::img::TCamera & | param, |
| unsigned | sensor_id = 0 |
||
| ) | const |
Definition at line 562 of file COpenNI2Generic.cpp.
References mrpt::hwdrivers::COpenNI2Generic::CDevice::DEPTH_STREAM, isOpen(), MRPT_UNUSED_PARAM, THROW_EXCEPTION, vDevices, and vDevices_mx.
◆ getDeviceIDFromSerialNum()
| bool COpenNI2Generic::getDeviceIDFromSerialNum | ( | const unsigned int | SerialRequired, |
| int & | sensor_id | ||
| ) | const |
Get the ID of the device corresponding to 'SerialRequired'.
Definition at line 376 of file COpenNI2Generic.cpp.
References MRPT_UNUSED_PARAM, THROW_EXCEPTION, vDevices, and vDevices_mx.
◆ getNextFrameD()
| void COpenNI2Generic::getNextFrameD | ( | mrpt::math::CMatrix & | depth_img, |
| mrpt::system::TTimeStamp & | timestamp, | ||
| bool & | there_is_obs, | ||
| bool & | hardware_error, | ||
| unsigned | sensor_id = 0 |
||
| ) |
The main data retrieving function, to be called after calling loadConfig() and initialize().
- Parameters
-
depth_img The output retrieved depth image (only if there_is_obs=true). timestamp The timestamp of the capture (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error. sensor_id The index of the sensor accessed.
Definition at line 474 of file COpenNI2Generic.cpp.
References mrpt::format(), getNumDevices(), MRPT_UNUSED_PARAM, showLog(), THROW_EXCEPTION, and vDevices.
◆ getNextFrameRGB()
| void COpenNI2Generic::getNextFrameRGB | ( | mrpt::img::CImage & | rgb_img, |
| mrpt::system::TTimeStamp & | timestamp, | ||
| bool & | there_is_obs, | ||
| bool & | hardware_error, | ||
| unsigned | sensor_id = 0 |
||
| ) |
The main data retrieving function, to be called after calling loadConfig() and initialize().
- Parameters
-
out_img The output retrieved RGB image (only if there_is_obs=true). timestamp The timestamp of the capture (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error. sensor_id The index of the sensor accessed. out_obs The output retrieved observation (only if there_is_obs=true). timestamp The timestamp of the capture (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error. sensor_id The index of the sensor accessed.
Definition at line 432 of file COpenNI2Generic.cpp.
References mrpt::format(), getNumDevices(), MRPT_UNUSED_PARAM, showLog(), THROW_EXCEPTION, and vDevices.
◆ getNextFrameRGBD()
| void COpenNI2Generic::getNextFrameRGBD | ( | mrpt::obs::CObservation3DRangeScan & | out_obs, |
| bool & | there_is_obs, | ||
| bool & | hardware_error, | ||
| unsigned | sensor_id = 0 |
||
| ) |
The main data retrieving function, to be called after calling loadConfig() and initialize().
- Parameters
-
out_obs The output retrieved observation (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error. sensor_id The index of the sensor accessed.
- See also
- doProcess
- Parameters
-
out_obs The output retrieved observation (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error. sensor_id The index of the sensor accessed.
Definition at line 514 of file COpenNI2Generic.cpp.
References mrpt::format(), getNumDevices(), MRPT_UNUSED_PARAM, showLog(), THROW_EXCEPTION, and vDevices.
◆ getNumDevices()
| int COpenNI2Generic::getNumDevices | ( | ) | const |
The number of available devices at initialization.
Definition at line 152 of file COpenNI2Generic.cpp.
References vDevices, and vDevices_mx.
Referenced by close(), getConnectedDevices(), getNextFrameD(), getNextFrameRGB(), getNextFrameRGBD(), isOpen(), and open().
◆ getNumInstances()
|
static |
Get the number of OpenNI2 cameras currently open via COpenNI2Generic.
Definition at line 55 of file COpenNI2Generic.cpp.
References numInstances().
◆ isOpen()
| bool COpenNI2Generic::isOpen | ( | const unsigned | sensor_id | ) | const |
Whether there is a working connection to the sensor.
Definition at line 252 of file COpenNI2Generic.cpp.
References getNumDevices(), MRPT_UNUSED_PARAM, THROW_EXCEPTION, vDevices, and vDevices_mx.
Referenced by getColorSensorParam(), getDepthSensorParam(), open(), and openDevicesBySerialNum().
◆ isVerbose()
| bool COpenNI2Generic::isVerbose | ( | ) | const |
◆ kill()
| void COpenNI2Generic::kill | ( | ) |
Kill the OpenNI2 driver.
- See also
- start()
Definition at line 241 of file COpenNI2Generic.cpp.
References THROW_EXCEPTION, vDevices, and vDevices_mx.
Referenced by ~COpenNI2Generic().
◆ open()
| void COpenNI2Generic::open | ( | unsigned | sensor_id = 0 | ) |
Try to open the camera (all the parameters [resolution,fps,...] must be set before calling this) - users may also call initialize(), which in turn calls this method.
Raises an exception upon error.
- Exceptions
-
std::exception A textual description of the error.
Definition at line 267 of file COpenNI2Generic.cpp.
References mrpt::format(), getNumDevices(), isOpen(), m_fps, m_height, m_verbose, m_width, MRPT_UNUSED_PARAM, showLog(), THROW_EXCEPTION, vDevices, and vDevices_mx.
Referenced by openDevicesBySerialNum().
◆ openDeviceBySerial()
| unsigned int COpenNI2Generic::openDeviceBySerial | ( | const unsigned int | SerialRequired | ) |
Open a RGBD device specified by its serial number.
This method is a wrapper for openDevicesBySerialNum(const std::set<unsigned>& vSerialRequired) This method requires to open the sensors which are still closed to read their serial.
Definition at line 368 of file COpenNI2Generic.cpp.
References openDevicesBySerialNum().
◆ openDevicesBySerialNum()
| unsigned int COpenNI2Generic::openDevicesBySerialNum | ( | const std::set< unsigned > & | vSerialRequired | ) |
Open a set of RGBD devices specified by their serial number.
Raises an exception when the demanded serial numbers are not among the connected devices. This function also fills a vector with the serial numbers of the connected OpenNI2 sensors (this requires openning the sensors which are still closed to read their serial)
Definition at line 312 of file COpenNI2Generic.cpp.
References mrpt::format(), isOpen(), m_fps, m_height, m_verbose, m_width, MRPT_UNUSED_PARAM, open(), showLog(), THROW_EXCEPTION, vDevices, and vDevices_mx.
Referenced by openDeviceBySerial().
◆ setVerbose()
| void COpenNI2Generic::setVerbose | ( | bool | verbose | ) |
Definition at line 157 of file COpenNI2Generic.cpp.
References m_verbose.
◆ showLog()
|
protected |
Definition at line 159 of file COpenNI2Generic.cpp.
References isVerbose().
Referenced by getConnectedDevices(), getNextFrameD(), getNextFrameRGB(), getNextFrameRGBD(), open(), and openDevicesBySerialNum().
◆ start()
| bool COpenNI2Generic::start | ( | ) |
Open all sensor streams (normally called automatically at constructor, no need to call it manually).
- Returns
- false on error
Definition at line 118 of file COpenNI2Generic.cpp.
References numInstances(), and THROW_EXCEPTION.
Referenced by COpenNI2Generic().
Member Data Documentation
◆ m_depth_format
|
protected |
Definition at line 155 of file COpenNI2Generic.h.
Referenced by getConnectedDevices().
◆ m_fps
|
protected |
Definition at line 154 of file COpenNI2Generic.h.
Referenced by open(), and openDevicesBySerialNum().
◆ m_grab_3D_points
|
protected |
Definition at line 161 of file COpenNI2Generic.h.
Referenced by mrpt::hwdrivers::COpenNI2Sensor::enableGrab3DPoints(), and mrpt::hwdrivers::COpenNI2Sensor::isGrab3DPointsEnabled().
◆ m_grab_depth
|
protected |
Definition at line 161 of file COpenNI2Generic.h.
Referenced by mrpt::hwdrivers::COpenNI2Sensor::enableGrabDepth(), and mrpt::hwdrivers::COpenNI2Sensor::isGrabDepthEnabled().
◆ m_grab_image
|
protected |
The data that the RGBD sensors can return.
Default: all true
Definition at line 161 of file COpenNI2Generic.h.
Referenced by mrpt::hwdrivers::COpenNI2Sensor::enableGrabRGB(), and mrpt::hwdrivers::COpenNI2Sensor::isGrabRGBEnabled().
◆ m_height
|
protected |
Definition at line 153 of file COpenNI2Generic.h.
Referenced by open(), and openDevicesBySerialNum().
◆ m_rgb_format
|
protected |
Definition at line 155 of file COpenNI2Generic.h.
Referenced by getConnectedDevices().
◆ m_verbose
|
protected |
Definition at line 156 of file COpenNI2Generic.h.
Referenced by COpenNI2Generic(), getConnectedDevices(), isVerbose(), open(), openDevicesBySerialNum(), and setVerbose().
◆ m_width
|
protected |
The same options (width, height and fps) are set for all the sensors.
(This could be changed if necessary)
Definition at line 153 of file COpenNI2Generic.h.
Referenced by open(), and openDevicesBySerialNum().
◆ vSerialNums
|
protected |
A vector with the serial numbers of the available devices.
Definition at line 145 of file COpenNI2Generic.h.