Detailed Description
template<class GRAPH_T = typename mrpt::graphs::CNetworkOfPoses2DInf>
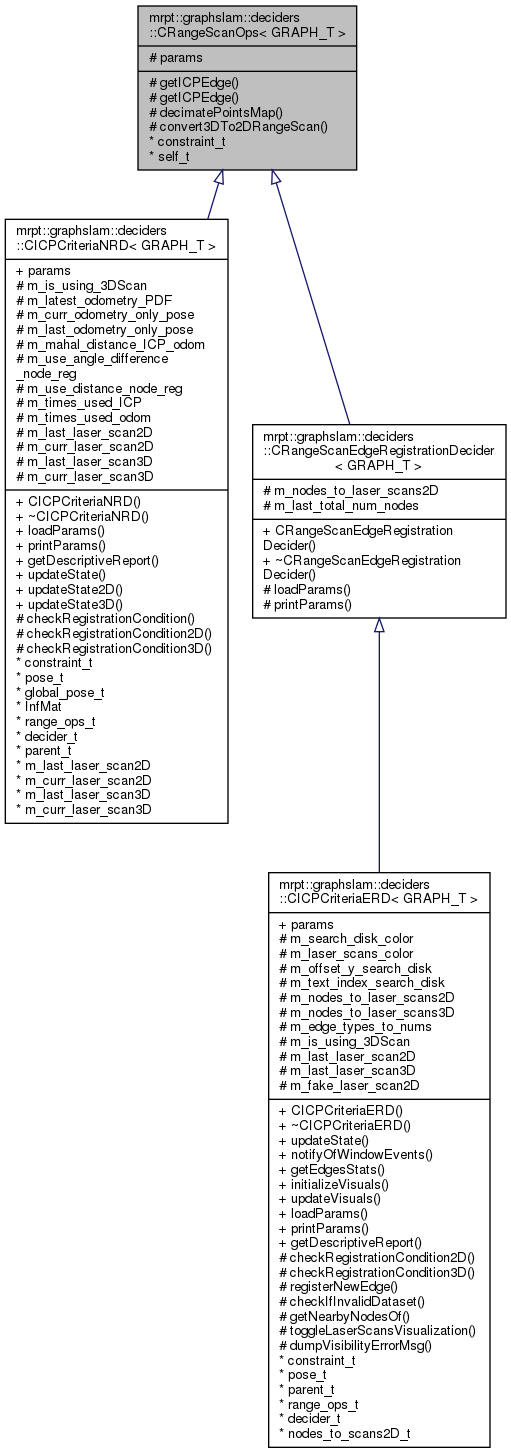
class mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >
Class for keeping together all the RangeScanner-related functions.
Description
Deciders that make use of either 2DRangeScans (laser generated observations) or 3DRangeScans (RGBD-cameras) can inherit from this class in case they want to use the underlying methods
.ini Configuration Parameters
The configuration parameters of the current decider class are listed below. These parameters are parsed from an external .ini configuration file from their respective section. If an optional parameter is not found a default value is used instead. If a mandatory/required parameter is not found a runtime error is raised. For a sample configuration file see $mrpt/share/mrpt/config_files/graphslam-engine/laser_odometry.ini (Modify $mrpt according to the path of your mrpt source directory).- conversion_sensor_label
- Default value : "KINECT_TO_2D_SCAN"
- Required : FALSE
- Description : Applicable only when dealing with 3DRangeScans. Used for converting 3DRangeScan to 2DRangesScan so that they are visualized on the 2D surface
- conversion_angle_sup
- Default value : 10
- Required : FALSE
- Description : Applicable only when dealing with 3DRangeScans. Used for converting 3DRangeScan to 2DRangesScan so that they are visualized on the 2D surface
- conversion_angle_inf
- Default value : 10
- Required : FALSE
- Description : Applicable only when dealing with 3DRangeScans. Used for converting 3DRangeScan to 2DRangesScan so that they are visualized on the 2D surface
- conversion_oversampling_ratio
- Default value : 1.1
- Required : FALSE
- Description : Applicable only when dealing with 3DRangeScans. Used for converting 3DRangeScan to 2DRangesScan so that they are visualized on the 2D surface
- Note
- Class contains an instance of the mrpt::slam::CICP class and it parses the configuration parameters of the latter from the "ICP" section. Refer to mrpt::slam::CICP documentation for its list of configuration parameters
Definition at line 72 of file CRangeScanOps.h.
#include <mrpt/graphslam/misc/CRangeScanOps.h>
Classes | |
| struct | TParams |
Protected Member Functions | |
| void | getICPEdge (const mrpt::obs::CObservation2DRangeScan &from, const mrpt::obs::CObservation2DRangeScan &to, constraint_t *rel_edge, const mrpt::poses::CPose2D *initial_pose=nullptr, mrpt::slam::CICP::TReturnInfo *icp_info=nullptr) |
| Align the 2D range scans provided and fill the potential edge that can transform the one into the other. More... | |
| void | getICPEdge (const mrpt::obs::CObservation3DRangeScan &from, const mrpt::obs::CObservation3DRangeScan &to, constraint_t *rel_edge, const mrpt::poses::CPose2D *initial_pose=nullptr, mrpt::slam::CICP::TReturnInfo *icp_info=nullptr) |
| Align the 3D range scans provided and find the potential edge that can transform the one into the other. More... | |
| void | decimatePointsMap (mrpt::maps::CPointsMap *m, size_t keep_point_every=4, size_t low_lim=0) |
| Reduce the size of the given CPointsMap by keeping one out of "keep_point_every" points. More... | |
| bool | convert3DTo2DRangeScan (mrpt::obs::CObservation3DRangeScan::Ptr &scan3D_in, mrpt::obs::CObservation2DRangeScan::Ptr *scan2D_out=nullptr) |
| Wrapper around the CObservation3DRangeScan::convertTo2DScan corresponding method. More... | |
Protected Attributes | |
| TParams | params |
Private Types | |
| using | constraint_t = typename GRAPH_T::constraint_t |
| Handy typedefs. More... | |
| using | self_t = CRangeScanOps< GRAPH_T > |
Member Typedef Documentation
◆ constraint_t
|
private |
Handy typedefs.
Definition at line 76 of file CRangeScanOps.h.
◆ self_t
|
private |
Definition at line 77 of file CRangeScanOps.h.
Member Function Documentation
◆ convert3DTo2DRangeScan()
|
protected |
Wrapper around the CObservation3DRangeScan::convertTo2DScan corresponding method.
- Returns
- True if operation was successful, false otherwise
Definition at line 143 of file CRangeScanOps_impl.h.
References MRPT_END, and MRPT_START.
◆ decimatePointsMap()
|
protected |
Reduce the size of the given CPointsMap by keeping one out of "keep_point_every" points.
- Note
- If low_lim is set then the PointsMap will contain at least low_lim measurements, regardless of keep_point_every value. Set low_lim to 0 if no lower limit is to be specified
Definition at line 109 of file CRangeScanOps_impl.h.
References mrpt::maps::CPointsMap::applyDeletionMask(), min, MRPT_END, MRPT_START, and mrpt::maps::CPointsMap::size().
◆ getICPEdge() [1/2]
|
protected |
Align the 2D range scans provided and fill the potential edge that can transform the one into the other.
User can optionally ask that additional information be returned in a TReturnInfo struct
Definition at line 16 of file CRangeScanOps_impl.h.
References mrpt::maps::CMetricMap::insertObservation(), MRPT_END, and MRPT_START.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::checkRegistrationCondition2D().
◆ getICPEdge() [2/2]
|
protected |
Align the 3D range scans provided and find the potential edge that can transform the one into the other.
Fills the 2D part (rel_edge) of the 3D constraint between the scans, since we are interested in computing the 2D alignment. User can optionally ask that additional information be returned in a TReturnInfo struct
Definition at line 51 of file CRangeScanOps_impl.h.
References ASSERTDEBMSG_, mrpt::format(), mrpt::obs::CObservation3DRangeScan::hasRangeImage, mrpt::maps::CMetricMap::insertObservation(), MRPT_END, and MRPT_START.
Member Data Documentation
◆ params
|
protected |
Definition at line 149 of file CRangeScanOps.h.