CObservationVelodyneScan.h File Reference
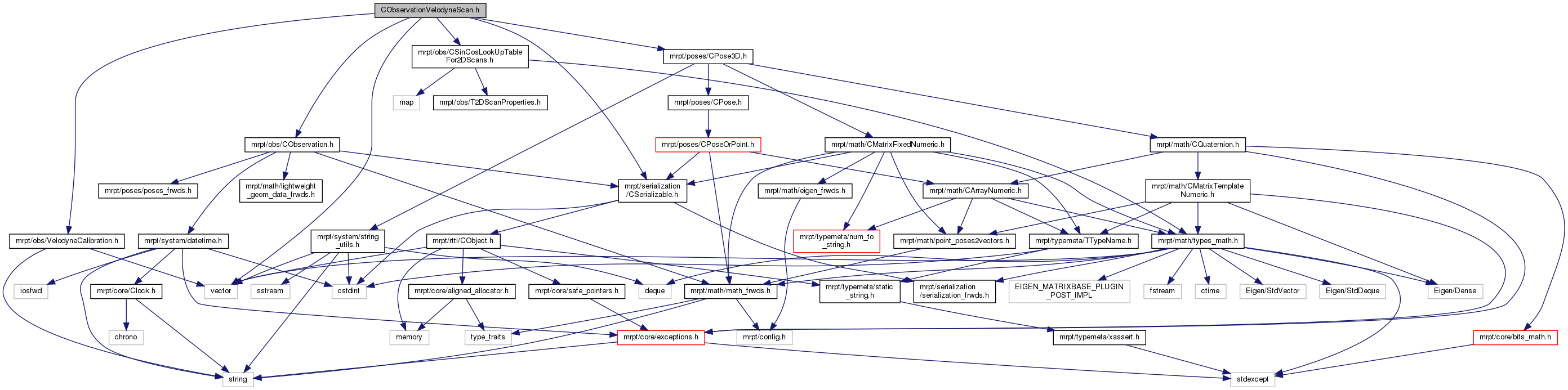
#include <mrpt/serialization/CSerializable.h>#include <mrpt/obs/CObservation.h>#include <mrpt/obs/CSinCosLookUpTableFor2DScans.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/obs/VelodyneCalibration.h>#include <vector>
Include dependency graph for CObservationVelodyneScan.h:
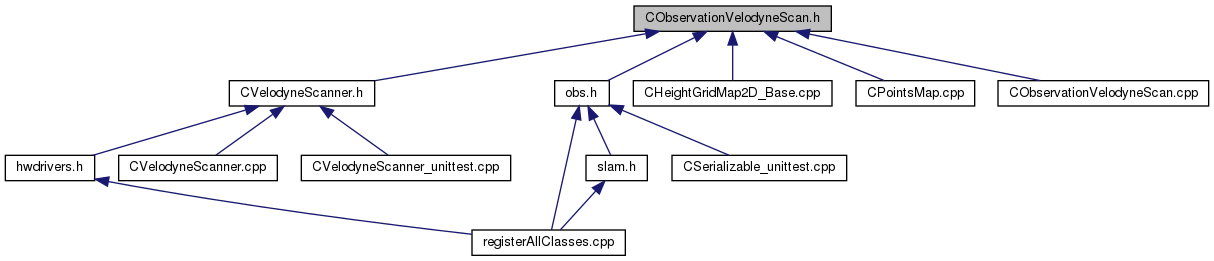
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::obs::CObservationVelodyneScan |
A CObservation-derived class for RAW DATA (and optionally, point cloud) of scans from 3D Velodyne LIDAR scanners. More... | |
| struct | mrpt::obs::CObservationVelodyneScan::laser_return_t |
| struct | mrpt::obs::CObservationVelodyneScan::raw_block_t |
| Raw Velodyne data block. More... | |
| struct | mrpt::obs::CObservationVelodyneScan::TVelodyneRawPacket |
| One unit of data from the scanner (the payload of one UDP DATA packet) More... | |
| struct | mrpt::obs::CObservationVelodyneScan::TVelodynePositionPacket |
| Payload of one POSITION packet. More... | |
| struct | mrpt::obs::CObservationVelodyneScan::TPointCloud |
| See point_cloud and scan_packets. More... | |
| struct | mrpt::obs::CObservationVelodyneScan::TGeneratePointCloudParameters |
| struct | mrpt::obs::CObservationVelodyneScan::TGeneratePointCloudSE3Results |
| Results for generatePointCloudAlongSE3Trajectory() More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::poses | |
| Classes for 2D/3D geometry representation, both of single values and probability density distributions (PDFs) in many forms. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
| mrpt::typemeta | |