CHeightGridMap2D_MRF.h File Reference
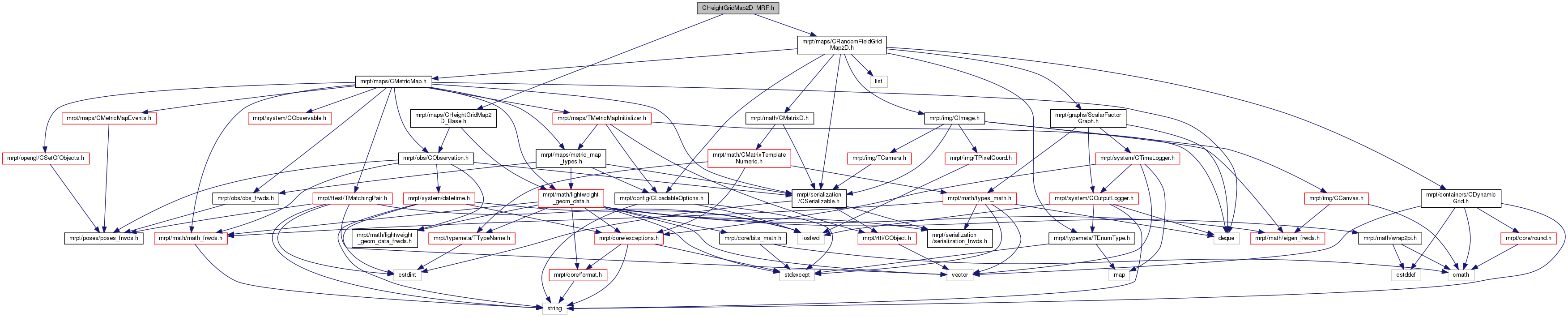
Include dependency graph for CHeightGridMap2D_MRF.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CHeightGridMap2D_MRF |
| CHeightGridMap2D_MRF represents digital-elevation-model over a 2D area, with uncertainty, based on a Markov-Random-Field (MRF) estimator. More... | |
| struct | mrpt::maps::CHeightGridMap2D_MRF::TInsertionOptions |
| Parameters related with inserting observations into the map. More... | |
| struct | mrpt::maps::CHeightGridMap2D_MRF::TMapDefinitionBase |
| struct | mrpt::maps::CHeightGridMap2D_MRF::TMapDefinition |
Namespaces | |
| mrpt::maps | |