Detailed Description
Definition at line 26 of file CQuaternion_unittest.cpp.
Inheritance diagram for QuaternionTests:
Protected Member Functions | |
| virtual void | SetUp () |
| virtual void | TearDown () |
| void | test_gimbalLock (double YAW, double PITCH, double ROLL) |
| void | test_toYPRAndBack (double YAW, double PITCH, double ROLL) |
| void | test_lnAndExpMatches (double yaw1, double pitch1, double roll1) |
| void | test_ExpAndLnMatches (double v0, double v1, double v2) |
Member Function Documentation
◆ SetUp()
|
inlineprotectedvirtual |
Definition at line 29 of file CQuaternion_unittest.cpp.
◆ TearDown()
|
inlineprotectedvirtual |
Definition at line 30 of file CQuaternion_unittest.cpp.
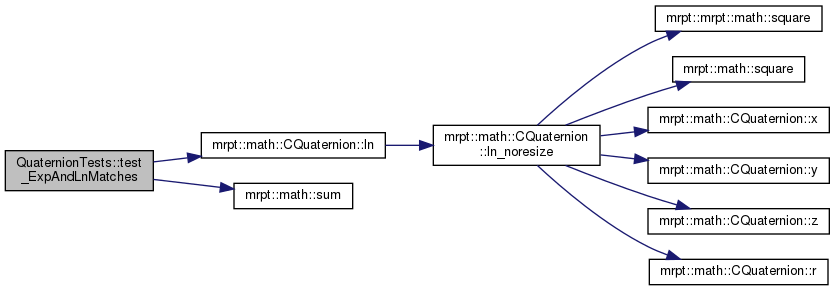
◆ test_ExpAndLnMatches()
|
inlineprotected |
Definition at line 98 of file CQuaternion_unittest.cpp.
References mrpt::math::CQuaternion< T >::ln(), and mrpt::math::sum().
Here is the call graph for this function:
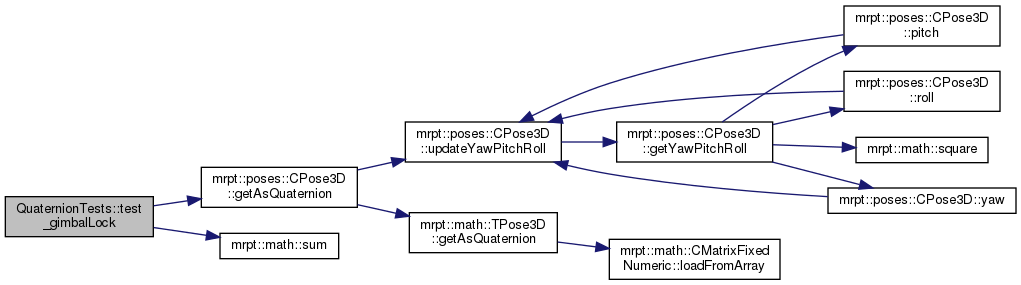
◆ test_gimbalLock()
|
inlineprotected |
Definition at line 31 of file CQuaternion_unittest.cpp.
References mrpt::poses::CPose3D::getAsQuaternion(), and mrpt::math::sum().
Here is the call graph for this function:
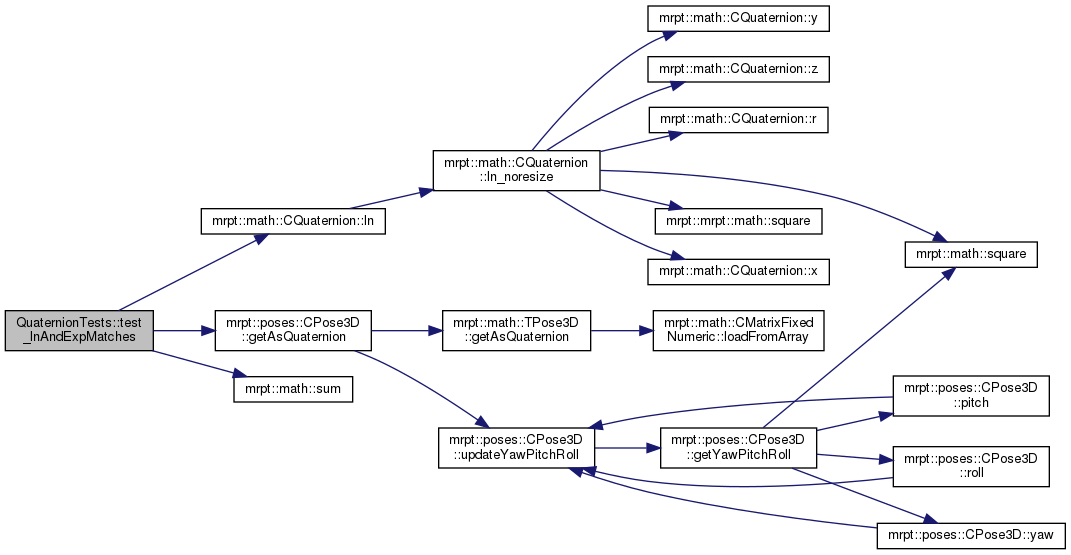
◆ test_lnAndExpMatches()
|
inlineprotected |
Definition at line 79 of file CQuaternion_unittest.cpp.
References mrpt::poses::CPose3D::getAsQuaternion(), mrpt::math::CQuaternion< T >::ln(), and mrpt::math::sum().
Here is the call graph for this function:
◆ test_toYPRAndBack()
|
inlineprotected |
Definition at line 49 of file CQuaternion_unittest.cpp.
References mrpt::poses::CPose3D::getRotationMatrix(), and mrpt::poses::CPose3DQuat::quat().
Here is the call graph for this function:
