[mrpt-opengl]
Visualization helpers for 3D rendering of all kind of primitives
Library mrpt-opengl
This library is part of MRPT and can be installed in Debian-based systems with:
sudo apt install libmrpt-opengl-dev
Read also how to import MRPT into your CMake scripts.
This library includes several data classes that represent objects that can be inserted into a 3D scene, which can be then rendered or streamed to disk or whatever.
A good starting point to explore this library is the base class for all the 3D objects: mrpt::opengl::CRenderizable
A 3D scene is represented by an object of the type mrpt::opengl::COpenGLScene, which in turn can contain one or several “viewports” in such a way that the rendering area is divided into several spaces, each displaying the same or different objects. See the tutorial: Tutorial: 3D scenes
See the full list of classes in mrpt::opengl.
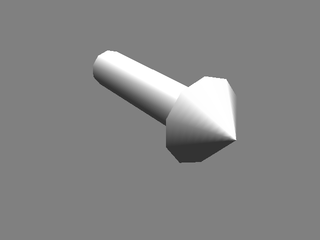
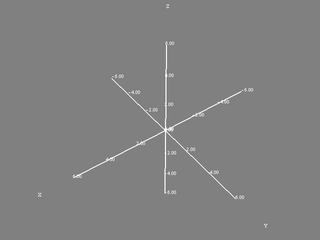
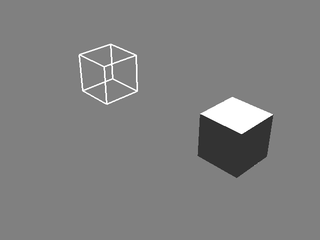
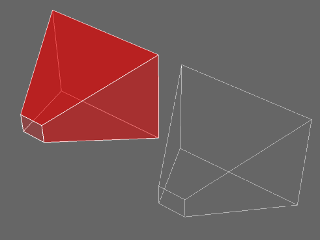
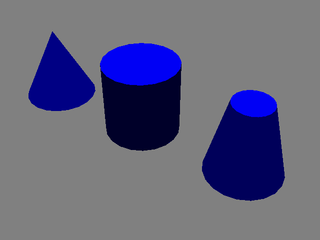
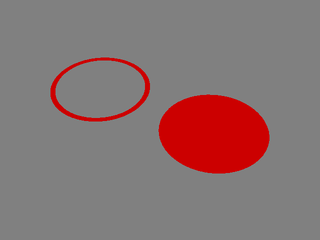
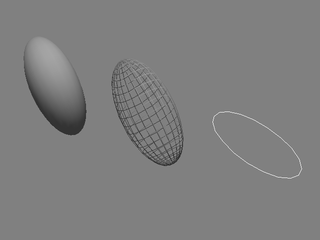
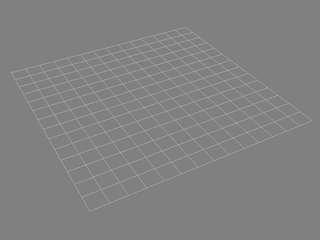
Next follows a list with the preview of most rendering primitive classes:
-
-

-
-
-
-
-
-
-
-
-
-
-
-
mrpt::opengl::CPointCloudColoured :
-
-
-
-

-

mrpt::opengl::CEllipsoidRangeBearing2D :
mrpt::opengl::CEllipsoidInverseDepth2D :
mrpt::opengl::CEllipsoidInverseDepth3D :
mrpt::opengl::COctoMapVoxels :
mrpt::opengl::CVectorField2D :
mrpt::opengl::CVectorField3D :
mrpt::opengl::stock_objects::BumblebeeCamera() :
mrpt::opengl::stock_objects::CornerXYSimple() :
mrpt::opengl::stock_objects::CornerXYZSimple() :
mrpt::opengl::stock_objects::CornerXYZ() :
mrpt::opengl::stock_objects::RobotPioneer() :
mrpt::opengl::stock_objects::RobotRhodon() :
mrpt::opengl::stock_objects::Hokuyo_URG() :
mrpt::opengl::stock_objects::Hokuyo_UTM() :
mrpt::opengl::stock_objects::Househam_Sprayer() :
Also, pose PDF classes can be converted into OpenGL objects with CSetOfObjects::posePDF2opengl() :
Note: The following extra OpenGL classes are provided by other libraries:
mrpt::opengl::CAngularObservationMesh (in mrpt-maps):
mrpt::opengl::CPlanarLaserScan (in mrpt-maps):
Library contents
// namespaces namespace mrpt::opengl::graph_tools; namespace mrpt::opengl; namespace mrpt::opengl::graph_tools; namespace mrpt::opengl::internal; namespace mrpt::opengl::stock_objects; namespace mrpt::opengl::stock_objects; // typedefs typedef std::map<shader_id_t, std::multimap<float, RenderQueueElement>> mrpt::opengl::RenderQueue; typedef uint8_t mrpt::opengl::shader_id_t; // enums enum mrpt::opengl::TCullFace; // structs struct mrpt::opengl::FrameBufferBinding; struct mrpt::opengl::RenderQueueElement; struct mrpt::opengl::T2DTextData; struct mrpt::opengl::TLightParameters; struct mrpt::opengl::TRenderMatrices; struct mrpt::opengl::TTriangle; // classes class mrpt::opengl::CArrow; class mrpt::opengl::CAssimpModel; class mrpt::opengl::CAxis; class mrpt::opengl::CBox; class mrpt::opengl::CCamera; class mrpt::opengl::CColorBar; class mrpt::opengl::CCylinder; class mrpt::opengl::CDisk; class mrpt::opengl::CEllipsoid2D; class mrpt::opengl::CEllipsoid3D; class mrpt::opengl::CEllipsoidInverseDepth2D; class mrpt::opengl::CEllipsoidInverseDepth3D; class mrpt::opengl::CEllipsoidRangeBearing2D; class mrpt::opengl::CFBORender; class mrpt::opengl::CFrustum; template <int DIM> class mrpt::opengl::CGeneralizedEllipsoidTemplate; class mrpt::opengl::CGridPlaneXY; class mrpt::opengl::CGridPlaneXZ; class mrpt::opengl::CMesh; class mrpt::opengl::CMesh3D; class mrpt::opengl::CMeshFast; class mrpt::opengl::COctoMapVoxels; template <class Derived> class mrpt::opengl::COctreePointRenderer; class mrpt::opengl::COpenGLBuffer; class mrpt::opengl::COpenGLFramebuffer; class mrpt::opengl::COpenGLScene; class mrpt::opengl::COpenGLVertexArrayObject; class mrpt::opengl::COpenGLViewport; class mrpt::opengl::CPointCloud; class mrpt::opengl::CPointCloudColoured; class mrpt::opengl::CPolyhedron; class mrpt::opengl::CRenderizable; class mrpt::opengl::CRenderizableShaderPoints; class mrpt::opengl::CRenderizableShaderText; class mrpt::opengl::CRenderizableShaderTexturedTriangles; class mrpt::opengl::CRenderizableShaderTriangles; class mrpt::opengl::CRenderizableShaderWireFrame; class mrpt::opengl::CSetOfLines; class mrpt::opengl::CSetOfObjects; class mrpt::opengl::CSetOfTexturedTriangles; class mrpt::opengl::CSetOfTriangles; class mrpt::opengl::CSimpleLine; class mrpt::opengl::CSphere; class mrpt::opengl::CText; class mrpt::opengl::CText3D; class mrpt::opengl::CTextMessageCapable; class mrpt::opengl::CTexturedPlane; class mrpt::opengl::CVectorField2D; class mrpt::opengl::CVectorField3D; class mrpt::opengl::PLY_Importer; class mrpt::opengl::Program; class mrpt::opengl::Shader; class mrpt::opengl::Visualizable; // global functions void mrpt::global_settings::OCTREE_RENDER_MAX_DENSITY_POINTS_PER_SQPIXEL(float value); size_t mrpt::global_settings::OCTREE_RENDER_MAX_POINTS_PER_NODE(); Program::Ptr mrpt::opengl::LoadDefaultShader(const shader_id_t id); void mrpt::opengl::registerAllClasses_mrpt_opengl(); template <class GRAPH_T> CSetOfObjects::Ptr mrpt::opengl::graph_tools::graph_visualize(const GRAPH_T& g, const mrpt::containers::yaml& extra_params = {});
Typedefs
typedef std::map<shader_id_t, std::multimap<float, RenderQueueElement>> mrpt::opengl::RenderQueue
A queue for rendering, sorted by shader program to minimize changes of OpenGL shader programs while rendering a scene.
Within each shader, objects are sorted by eye-to-object distance, so we can later render them from back to front to render transparencies properly Filled by sortRenderObjectsByShader()
typedef uint8_t mrpt::opengl::shader_id_t
Type for IDs of shaders.
See also:
Global Functions
void mrpt::global_settings::OCTREE_RENDER_MAX_DENSITY_POINTS_PER_SQPIXEL(float value)
Default value = 0.01 points/px^2.
Affects to these classes (read their docs for further details):
size_t mrpt::global_settings::OCTREE_RENDER_MAX_POINTS_PER_NODE()
Default value = 1e5.
Maximum number of elements in each octree node before spliting. Affects to these classes (read their docs for further details):
Program::Ptr mrpt::opengl::LoadDefaultShader(const shader_id_t id)
Loads a set of OpenGL Vertex+Fragment shaders from the default library available in mrpt::opengl.
See also:
void mrpt::opengl::registerAllClasses_mrpt_opengl()
Forces manual RTTI registration of all serializable classes in this namespace.
Should never be required to be explicitly called by users, except if building MRPT as a static library.
template <class GRAPH_T> CSetOfObjects::Ptr mrpt::opengl::graph_tools::graph_visualize( const GRAPH_T& g, const mrpt::containers::yaml& extra_params = {} )
Returns an opengl objects representation of an arbitrary graph, as a network of 3D pose frames.
Note that the “global” coordinates of each node are taken from mrpt::graphs::CNetworkOfPoses::nodes, so if a node appears in “edges” but not in “nodes” it will be not displayed.
List of accepted extra parameters:
Parameter name |
Type |
Description |
Default |
show_ID_labels bool Show poses ID labels false show_ground_grid bool Creates a gray grid on the ground level ( true show_edges bool Draw lines between nodes with at least one edge between them. true show_node_corners bool Draw a small 3D corner frame at each node (see true show_edge_rel_poses bool Draw the relative poses stored in each edge as a small extra 3D corner frame at each “node pose oplus edge pose” false nodes_point_size double If set to !=0, draw a point of the given size (glPointSize) at each node. 0.0 nodes_corner_scale double If show_node_corners==true, the size (length) of the corner lines. 0.7 nodes_edges_corner_scale double If show_edge_rel_poses==true, the size of the corners at the end of each drawn edge 0.4 nodes_point_color int If nodes_point_size>0, set this value to a hexadecimal int value 0xRRGGBBAA with the desired RGB+Alpha color of points. 0xA0A0A0FF edge_color int If show_edges==true, the color of those edges as a hexadecimal int value 0xRRGGBBAA with RGB+Alpha color. 0x0000FF40 edge_rel_poses_color int If show_edge_rel_poses==true, the color of those edges as a hexadecimal int value 0xRRGGBBAA with RGB+Alpha color. 0xFF800040 edge_width double If show_edges==true, the width of edge lines. 1 ======================== ====== ======================================================================================================================= ==========
Implemented as headers-only in graph_tools_impl.h
Parameters:
g |
The graph |
extra_params |
An extra set of optional parameters (see below). |
See also:
mrpt::graphs::CNetworkOfPoses2D, mrpt::graphs::CNetworkOfPoses3D, mrpt::graphs::CNetworkOfPoses2DInf, mrpt::graphs::CNetworkOfPoses3DInf