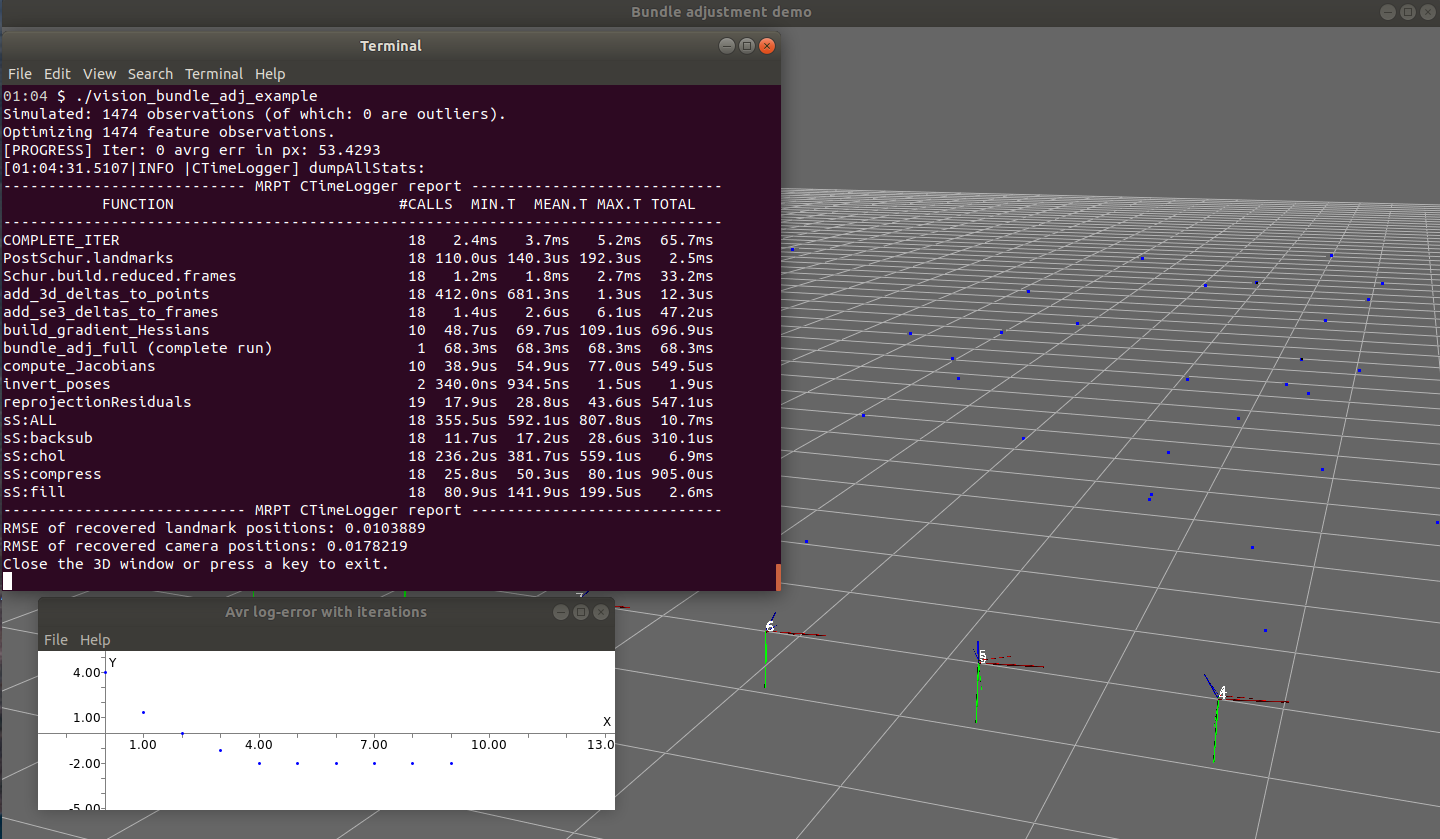
Example: vision_bundle_adj_example
This examples demonstrates the function mrpt::vision::bundle_adj_full() with a set of simulated monocular camera observations. See the bundle adjustment module documentation on the C++ API.
This function requires setting MRPT_ALLOW_LGPLV3=ON in CMake when building MRPT.
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2023, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ /* =========================================================================== EXAMPLE: bundle_adj_full_demo PURPOSE: Demonstrate "mrpt::vision::bundle_adj_full" with a set of simulated or real data. If the program is called without command line arguments, simulated measurements will be used. To use real data, invoke: bundle_adj_full_demo <feats.txt> <cam_model.cfg> Where <feats.txt> is a "TSequenceFeatureObservations" saved as a text file, and <cam_model.cfg> is a .ini-like file with a section named "CAMERA" loadable by mrpt::img::TCamera. DATE: 20-Aug-2010 =========================================================================== */ #include <mrpt/config/CConfigFile.h> #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/gui/CDisplayWindowPlots.h> #include <mrpt/io/CTextFileLinesParser.h> #include <mrpt/math/geometry.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/opengl/CPointCloud.h> #include <mrpt/opengl/stock_objects.h> #include <mrpt/poses/CPose3DQuat.h> #include <mrpt/random.h> #include <mrpt/system/filesystem.h> #include <mrpt/vision/bundle_adjustment.h> #include <mrpt/vision/pinhole.h> #include <iostream> using namespace mrpt::literals; // _deg using namespace mrpt; using namespace mrpt::gui; using namespace mrpt::math; using namespace mrpt::system; using namespace mrpt::opengl; using namespace mrpt::poses; using namespace mrpt::img; using namespace mrpt::vision; using namespace std; CVectorDouble history_avr_err; double WORLD_SCALE = 1; // Will change when loading SBA examples // A feedback functor, which is called on each iteration by the optimizer to let // us know on the progress: void my_BundleAdjustmentFeedbackFunctor( const size_t cur_iter, const double cur_total_sq_error, const size_t max_iters, const TSequenceFeatureObservations& input_observations, const TFramePosesVec& current_frame_estimate, const TLandmarkLocationsVec& current_landmark_estimate) { const double avr_err = std::sqrt(cur_total_sq_error / input_observations.size()); history_avr_err.push_back(std::log(1e-100 + avr_err)); if ((cur_iter % 10) == 0) { cout << "[PROGRESS] Iter: " << cur_iter << " avrg err in px: " << avr_err << endl; cout.flush(); } } // ------------------------------------------------------ // bundle_adj_full_demo // ------------------------------------------------------ void bundle_adj_full_demo( const TCamera& camera_params, const TSequenceFeatureObservations& allObs, TFramePosesVec& frame_poses, TLandmarkLocationsVec& landmark_points) { cout << "Optimizing " << allObs.size() << " feature observations.\n"; mrpt::containers::yaml extra_params; // extra_params["verbose"] = true; extra_params["max_iterations"] = 2000; // 250; // extra_params["num_fix_frames"] = 1; // extra_params["num_fix_points"] = 0; extra_params["robust_kernel"] = false; extra_params["kernel_param"] = 5.0; extra_params["profiler"] = true; mrpt::vision::bundle_adj_full( allObs, camera_params, frame_poses, landmark_points, extra_params, &my_BundleAdjustmentFeedbackFunctor); } // --------------------------------------------------------- mrpt::opengl::CSetOfObjects::Ptr framePosesVecVisualize( const TFramePosesVec& poses, const double len, const double lineWidth); // ------------------------------------------------------ // MAIN // ------------------------------------------------------ int main(int argc, char** argv) { try { // Simulation or real-data? (read at the top of this file): if ((argc != 1 && argc != 3 && argc != 4) || (argc == 2 && !strcpy(argv[1], "--help"))) { cout << "Usage:\n" << argv[0] << " --help -> Shows this help\n" << argv[0] << " -> Simulation\n" << argv[0] << " <feats.txt> <cam_model.cfg> -> Data in MRPT format\n" << argv[0] << " <cams.txt> <points.cfg> <calib.txt> -> SBA format\n"; return 1; } // BA data: TCamera camera_params; TSequenceFeatureObservations allObs; TFramePosesVec frame_poses; TLandmarkLocationsVec landmark_points; // Only for simulation mode: TFramePosesVec frame_poses_real, frame_poses_noisy; // Ground truth & starting point TLandmarkLocationsVec landmark_points_real, landmark_points_noisy; // Ground truth & starting point if (argc == 1) { random::CRandomGenerator rg(1234); // Simulation // -------------------------- // The projective camera model: camera_params.ncols = 800; camera_params.nrows = 600; camera_params.fx(400); camera_params.fy(400); camera_params.cx(400); camera_params.cy(300); // Generate synthetic dataset: // ------------------------------------- const size_t nPts = 100; // # of 3D landmarks const double L1 = 60; // Draw random poses in the rectangle L1xL2xL3 const double L2 = 10; const double L3 = 10; const double max_camera_dist = L1 * 4; const double cameraPathLen = L1 * 1.2; // const double cameraPathEllipRadius1 = L1*2; // const double cameraPathEllipRadius2 = L2*2; // Noise params: const double STD_PX_ERROR = 0.10; // pixels const double STD_PX_ERROR_OUTLIER = 5; // pixels const double PROBABILITY_OUTLIERS = 0; // 0.01; const double STD_PT3D = 0.10; // meters const double STD_CAM_XYZ = 0.05; // meters const double STD_CAM_ANG = 5.0_deg; // degs landmark_points_real.resize(nPts); for (size_t i = 0; i < nPts; i++) { landmark_points_real[i].x = rg.drawUniform(-L1, L1); landmark_points_real[i].y = rg.drawUniform(-L2, L2); landmark_points_real[i].z = rg.drawUniform(-L3, L3); } // const double angStep = M_PI*2.0/40; const double camPosesSteps = 2 * cameraPathLen / 20; frame_poses_real.clear(); for (double x = -cameraPathLen; x < cameraPathLen; x += camPosesSteps) { TPose3D p; p.x = x; // cameraPathEllipRadius1 * cos(ang); p.y = 4 * L2; // cameraPathEllipRadius2 * sin(ang); p.z = 0; p.yaw = -90.0_deg - 30.0_deg * x / cameraPathLen; // wrapToPi(ang+M_PI); p.pitch = 0; p.roll = 0; // Angles above is for +X pointing to the (0,0,0), but we want // instead +Z pointing there, as typical in camera models: frame_poses_real.push_back( CPose3D(p) + CPose3D(0, 0, 0, -90.0_deg, 0, -90.0_deg)); } // Simulate the feature observations: size_t numOutliers = 0; allObs.clear(); map<TCameraPoseID, size_t> numViewedFrom; for (size_t i = 0; i < frame_poses_real.size(); i++) // for each pose { // predict all landmarks: for (size_t j = 0; j < landmark_points_real.size(); j++) { TPixelCoordf px = mrpt::vision::pinhole::projectPoint_no_distortion< false>( camera_params, frame_poses_real[i], landmark_points_real[j]); const bool is_outlier = (rg.drawUniform(0.0, 1.0) < PROBABILITY_OUTLIERS); px.x += rg.drawGaussian1D( 0, is_outlier ? STD_PX_ERROR_OUTLIER : STD_PX_ERROR); px.y += rg.drawGaussian1D( 0, is_outlier ? STD_PX_ERROR_OUTLIER : STD_PX_ERROR); // Out of image? if (px.x < 0 || px.y < 0 || px.x > camera_params.ncols || px.y > camera_params.nrows) continue; // Too far? const double dist = math::distance( TPoint3D(frame_poses_real[i].asTPose()), landmark_points_real[j]); if (dist > max_camera_dist) continue; // Ok, accept it: if (is_outlier) numOutliers++; allObs.push_back(TFeatureObservation(j, i, px)); numViewedFrom[i]++; } } cout << "Simulated: " << allObs.size() << " observations (of which: " << numOutliers << " are outliers).\n"; ASSERT_EQUAL_(numViewedFrom.size(), frame_poses_real.size()); // Make sure all poses and all LMs appear at least once! { TSequenceFeatureObservations allObs2 = allObs; std::map<TCameraPoseID, TCameraPoseID> old2new_camIDs; std::map<TLandmarkID, TLandmarkID> old2new_lmIDs; allObs2.compressIDs(&old2new_camIDs, &old2new_lmIDs); ASSERT_EQUAL_(old2new_camIDs.size(), frame_poses_real.size()); ASSERT_EQUAL_( old2new_lmIDs.size(), landmark_points_real.size()); } // Add noise to the data: frame_poses_noisy = frame_poses_real; landmark_points_noisy = landmark_points_real; for (size_t i = 0; i < landmark_points_noisy.size(); i++) landmark_points_noisy[i] += TPoint3D( rg.drawGaussian1D(0, STD_PT3D), rg.drawGaussian1D(0, STD_PT3D), rg.drawGaussian1D(0, STD_PT3D)); for (size_t i = 1; i < frame_poses_noisy.size(); i++) // DON'T add error to frame[0], the global reference! { CPose3D bef = frame_poses_noisy[i]; frame_poses_noisy[i].setFromValues( frame_poses_noisy[i].x() + rg.drawGaussian1D(0, STD_CAM_XYZ), frame_poses_noisy[i].y() + rg.drawGaussian1D(0, STD_CAM_XYZ), frame_poses_noisy[i].z() + rg.drawGaussian1D(0, STD_CAM_XYZ), frame_poses_noisy[i].yaw() + rg.drawGaussian1D(0, STD_CAM_ANG), frame_poses_noisy[i].pitch() + rg.drawGaussian1D(0, STD_CAM_ANG), frame_poses_noisy[i].roll() + rg.drawGaussian1D(0, STD_CAM_ANG)); } // Optimize it: frame_poses = frame_poses_noisy; landmark_points = landmark_points_noisy; #if 0 vector<std::array<double,2> > resids; const double initial_total_sq_err = mrpt::vision::reprojectionResiduals(allObs,camera_params,frame_poses, landmark_points,resids, false); cout << "Initial avr error in px: " << std::sqrt(initial_total_sq_err/allObs.size()) << endl; #endif // Run Bundle Adjustmen bundle_adj_full_demo( camera_params, allObs, frame_poses, landmark_points); // Evaluate vs. ground truth: double landmarks_total_sq_err = 0; for (size_t i = 0; i < landmark_points.size(); i++) landmarks_total_sq_err += square( landmark_points_real[i].distanceTo(landmark_points[i])); double cam_point_total_sq_err = 0; for (size_t i = 0; i < frame_poses.size(); i++) cam_point_total_sq_err += square(frame_poses[i].distanceTo(frame_poses_real[i])); cout << "RMSE of recovered landmark positions: " << std::sqrt(landmarks_total_sq_err / landmark_points.size()) << endl; cout << "RMSE of recovered camera positions: " << std::sqrt(cam_point_total_sq_err / frame_poses.size()) << endl; } else { // Real data // -------------------------- if (argc == 3) { const string feats_fil = string(argv[1]); const string cam_fil = string(argv[2]); cout << "Loading observations from: " << feats_fil << "..."; cout.flush(); allObs.loadFromTextFile(feats_fil); cout << "Done.\n"; allObs.decimateCameraFrames(20); allObs.compressIDs(); ASSERT_(mrpt::system::fileExists(cam_fil)); cout << "Loading camera params from: " << cam_fil; mrpt::config::CConfigFile cfgCam(cam_fil); camera_params.loadFromConfigFile("CAMERA", cfgCam); cout << "Done.\n"; cout << "Initial gross estimate..."; mrpt::vision::ba_initial_estimate( allObs, camera_params, frame_poses, landmark_points); cout << "OK\n"; } else { // Load data from 3 files in the same format as used by // "eucsbademo" in the SBA library: const string cam_frames_fil = string(argv[1]); const string obs_fil = string(argv[2]); const string calib_fil = string(argv[3]); { cout << "Loading initial camera frames from: " << cam_frames_fil << "..."; cout.flush(); mrpt::io::CTextFileLinesParser fil(cam_frames_fil); frame_poses.clear(); std::istringstream ss; while (fil.getNextLine(ss)) { double q[4], t[3]; ss >> q[0] >> q[1] >> q[2] >> q[3] >> t[0] >> t[1] >> t[2]; mrpt::poses::CPose3DQuat p( t[0], t[1], t[2], mrpt::math::CQuaternionDouble( q[0], q[1], q[2], q[3])); // cout << "cam: " << p << endl; frame_poses.push_back(CPose3D(p)); } cout << "Done. " << frame_poses.size() << " cam frames loaded\n"; frame_poses_noisy = frame_poses; // To draw in 3D the // initial values as well. } { cout << "Loading observations & feature 3D points from: " << obs_fil << "..."; cout.flush(); mrpt::io::CTextFileLinesParser fil(obs_fil); landmark_points.clear(); allObs.clear(); std::istringstream ss; while (fil.getNextLine(ss)) { // # X Y Z nframes frame0 x0 y0 frame1 x1 y1 ... double t[3]; size_t N = 0; ss >> t[0] >> t[1] >> t[2] >> N; const TLandmarkID feat_id = landmark_points.size(); const TPoint3D pt(t[0], t[1], t[2]); landmark_points.push_back(pt); // Read obs: for (size_t i = 0; i < N; i++) { TCameraPoseID frame_id; TPixelCoordf px; ss >> frame_id >> px.x >> px.y; allObs.push_back( TFeatureObservation(feat_id, frame_id, px)); // cout << "feat: " << feat_id << " cam: " << // frame_id << " px: " << px.x << "," << px.y << // endl; } } cout << "Done. " << landmark_points.size() << " points, " << allObs.size() << " observations read.\n"; landmark_points_real = landmark_points; // To draw in 3D // the initial // values as well. } CMatrixDouble33 cam_pars; cam_pars.loadFromTextFile(calib_fil); // cout << "Calib:\n" << cam_pars << endl; camera_params.fx(cam_pars(0, 0)); camera_params.fy(cam_pars(1, 1)); camera_params.cx(cam_pars(0, 2)); camera_params.cy(cam_pars(1, 2)); cout << "camera calib:\n" << camera_params.dumpAsText() << endl; // Change world scale: WORLD_SCALE = 2000; } // Do it: bundle_adj_full_demo( camera_params, allObs, frame_poses, landmark_points); } // Display results in 3D: // ------------------------------- gui::CDisplayWindow3D win("Bundle adjustment demo", 800, 600); Scene::Ptr& scene = win.get3DSceneAndLock(); { // Ground plane: auto obj = CGridPlaneXY::Create(-200, 200, -200, 200, 0, 5); obj->setColor(0.7, 0.7, 0.7); scene->insert(obj); } if (!landmark_points_real.empty()) { // Feature points: ground truth auto obj = CPointCloud::Create(); obj->setPointSize(2); obj->setColor(0, 0, 0); obj->loadFromPointsList(landmark_points_real); obj->setScale(WORLD_SCALE); scene->insert(obj); } if (!landmark_points_noisy.empty()) { // Feature points: noisy auto obj = CPointCloud::Create(); obj->setPointSize(4); obj->setColor(0.7, 0.2, 0.2, 0); obj->loadFromPointsList(landmark_points_noisy); obj->setScale(WORLD_SCALE); scene->insert(obj); } { // Feature points: estimated auto obj = CPointCloud::Create(); obj->setPointSize(3); obj->setColor(0, 0, 1, 1.0); obj->loadFromPointsList(landmark_points); obj->setScale(WORLD_SCALE); scene->insert(obj); } // Camera Frames: estimated scene->insert(framePosesVecVisualize(frame_poses_noisy, 1.0, 1)); scene->insert(framePosesVecVisualize(frame_poses_real, 2.0, 1)); scene->insert(framePosesVecVisualize(frame_poses, 2.0, 3)); win.setCameraZoom(100); win.unlockAccess3DScene(); win.repaint(); // Also, show history of error: gui::CDisplayWindowPlots winPlot( "Avr log-error with iterations", 500, 200); // winPlot.setPos(0,620); winPlot.plot(history_avr_err, "b.3"); winPlot.axis_fit(); cout << "Close the 3D window or press a key to exit.\n"; win.waitForKey(); return 0; } catch (const std::exception& e) { std::cout << "MRPT exception caught: " << e.what() << std::endl; return -1; } } mrpt::opengl::CSetOfObjects::Ptr framePosesVecVisualize( const TFramePosesVec& poses, const double len, const double lineWidth) { auto obj = mrpt::opengl::CSetOfObjects::Create(); for (size_t i = 0; i < poses.size(); i++) { CSetOfObjects::Ptr corner = opengl::stock_objects::CornerXYZSimple(len, lineWidth); CPose3D p = poses[i]; p.x(WORLD_SCALE * p.x()); p.y(WORLD_SCALE * p.y()); p.z(WORLD_SCALE * p.z()); corner->setPose(p); corner->setName(format("%u", (unsigned int)i)); corner->enableShowName(); obj->insert(corner); } return obj; }