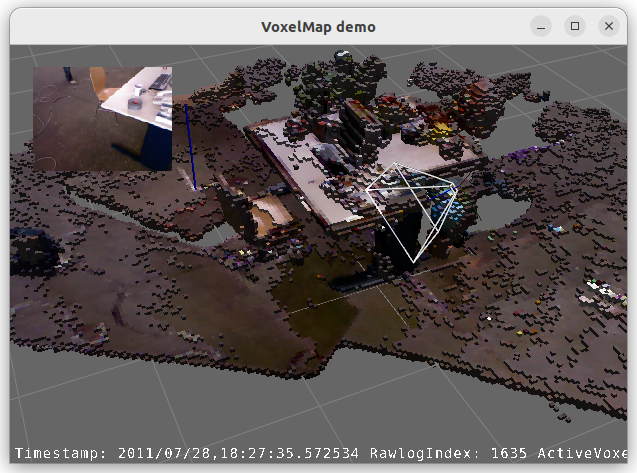
Example: maps_voxelmap_from_tum_dataset
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2023, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/io/lazy_load_path.h> #include <mrpt/maps/CColouredPointsMap.h> #include <mrpt/maps/CVoxelMapRGB.h> #include <mrpt/math/CMatrixDynamic.h> #include <mrpt/obs/CObservation3DRangeScan.h> #include <mrpt/obs/CRawlog.h> #include <mrpt/opengl/CFrustum.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/opengl/COctoMapVoxels.h> #include <mrpt/opengl/CPointCloudColoured.h> #include <mrpt/opengl/stock_objects.h> #include <mrpt/poses/CPose3DInterpolator.h> #include <mrpt/system/filesystem.h> #include <mrpt/system/os.h> #include <chrono> #include <iostream> #include <thread> // ------------------------------------------------------ // TestVoxelMapFromTUM // ------------------------------------------------------ void TestVoxelMapFromTUM( const std::string& datasetRawlogFile, const std::string& groundTruthFile, double VOXELMAP_RESOLUTION, double VOXELMAP_MAX_RANGE) { // To find out external image files: mrpt::io::setLazyLoadPathBase( mrpt::obs::CRawlog::detectImagesDirectory(datasetRawlogFile)); std::cout << "Loading dataset: " << datasetRawlogFile << "..." << std::endl; mrpt::obs::CRawlog dataset; dataset.loadFromRawLogFile(datasetRawlogFile); std::cout << "Done! " << dataset.size() << " entries." << std::endl; std::cout << "Loading GT path from: " << groundTruthFile << "..." << std::endl; mrpt::math::CMatrixDouble gtData; gtData.loadFromTextFile(groundTruthFile); std::cout << "Done! " << gtData.rows() << " rows." << std::endl; // # timestamp tx ty tz qx qy qz qw mrpt::poses::CPose3DInterpolator gt; for (int i = 0; i < gtData.rows(); i++) { gt.insert( mrpt::Clock::fromDouble(gtData(i, 0)), mrpt::poses::CPose3D::FromQuaternionAndTranslation( mrpt::math::CQuaternionDouble( gtData(i, 7), gtData(i, 4), gtData(i, 5), gtData(i, 6)), mrpt::math::TPoint3D( gtData(i, 1), gtData(i, 2), gtData(i, 3)))); } // ---------------------- // Voxel map // ---------------------- mrpt::maps::CVoxelMapRGB map(VOXELMAP_RESOLUTION); map.insertionOptions.max_range = VOXELMAP_MAX_RANGE; // [m] map.insertionOptions.ray_trace_free_space = false; // only occupied // gui and demo app: mrpt::gui::CDisplayWindow3D win("VoxelMap demo", 640, 480); auto glVoxels = mrpt::opengl::COctoMapVoxels::Create(); // *IMPORTANT*: Required to see RGB color in the opengl visualization: glVoxels->setVisualizationMode( mrpt::opengl::COctoMapVoxels::COLOR_FROM_RGB_DATA); // create GL visual objects: auto glCamGroup = mrpt::opengl::CSetOfObjects::Create(); glCamGroup->insert(mrpt::opengl::stock_objects::CornerXYZSimple(0.3)); auto glObsPts = mrpt::opengl::CPointCloudColoured::Create(); glCamGroup->insert(glObsPts); bool glCamFrustrumDone = false; mrpt::opengl::Viewport::Ptr glViewRGB; { mrpt::opengl::Scene::Ptr& scene = win.get3DSceneAndLock(); // Set a large near plane so we can "see thru walls" easily when // approaching a point: scene->getViewport()->setViewportClipDistances(2.0, 200.0); { auto gl_grid = mrpt::opengl::CGridPlaneXY::Create(-20, 20, -20, 20, 0, 1); gl_grid->setColor_u8(mrpt::img::TColor(0x80, 0x80, 0x80)); scene->insert(gl_grid); } scene->insert(mrpt::opengl::stock_objects::CornerXYZSimple()); scene->insert(glCamGroup); // View occupied points: { auto mapPts = map.getOccupiedVoxels(); mapPts->renderOptions.point_size = 5.0; scene->insert(mapPts->getVisualization()); } scene->insert(glVoxels); glViewRGB = scene->createViewport("rgb_view"); glViewRGB->setViewportPosition(0, 0.7, 0.3, 0.25); glViewRGB->setTransparent(true); win.unlockAccess3DScene(); } std::cout << "Close the window to exit" << std::endl; size_t rawlogIndex = 0; bool paused = false; mrpt::Clock::time_point lastObsTim; while (win.isOpen()) { win.get3DSceneAndLock(); // Get and process one observation: if (rawlogIndex < dataset.size() && !paused) { mrpt::obs::CObservation3DRangeScan::Ptr obs; if (dataset.getType(rawlogIndex) == mrpt::obs::CRawlog::etObservation && (obs = std::dynamic_pointer_cast< mrpt::obs::CObservation3DRangeScan>( dataset.getAsObservation(rawlogIndex)))) { bool poseOk = false; mrpt::poses::CPose3D camPose; lastObsTim = obs->getTimeStamp(); gt.interpolate(lastObsTim, camPose, poseOk); if (poseOk) { // set viz camera pose: glCamGroup->setPose(camPose); using namespace mrpt::literals; obs->sensorPose = mrpt::poses::CPose3D::FromYawPitchRoll( 0.0_deg, -90.0_deg, 90.0_deg); // draw observation raw data: mrpt::maps::CColouredPointsMap colPts; mrpt::obs::T3DPointsProjectionParams pp; pp.takeIntoAccountSensorPoseOnRobot = true; obs->unprojectInto(colPts, pp); glObsPts->loadFromPointsMap(&colPts); if (!glCamFrustrumDone) { glCamFrustrumDone = true; auto glFrustrum = mrpt::opengl::CFrustum::Create( obs->cameraParamsIntensity, 1e-3 /*focalDistScale*/); glFrustrum->setPose(obs->sensorPose); glCamGroup->insert(glFrustrum); } // update the voxel map: map.insertObservation(*obs, camPose); // Update the voxel map visualization: static int decimUpdateViz = 0; if (decimUpdateViz++ > 20) { decimUpdateViz = 0; map.renderingOptions.generateFreeVoxels = false; map.getAsOctoMapVoxels(*glVoxels); } // RGB view: if (obs->hasIntensityImage) { glViewRGB->setImageView(obs->intensityImage); } } } rawlogIndex++; } win.unlockAccess3DScene(); if (win.keyHit()) { const unsigned int k = win.getPushedKey(); switch (k) { case ' ': paused = !paused; break; }; } win.addTextMessage( 5, 5, mrpt::format( "Timestamp: %s RawlogIndex: %zu ActiveVoxelCells: %zu", mrpt::system::dateTimeLocalToString(lastObsTim).c_str(), rawlogIndex, map.grid().activeCellsCount()), 1 /*id*/); win.repaint(); using namespace std::chrono_literals; std::this_thread::sleep_for(10ms); }; } int main(int argc, char** argv) { try { if (argc != 3 && argc != 4) throw std::invalid_argument( "Usage: PROGRAM <PATH_TO_TUM_DATASET.rawlog> " "<VOXELMAP_RESOLUTION> [<VOXELMAP_MAX_RANGE>]"); const std::string gtFile = mrpt::system::pathJoin( {mrpt::system::extractFileDirectory(argv[1]), "groundtruth.txt"}); double VOXELMAP_MAX_RANGE = 5.0; if (argc == 4) { VOXELMAP_MAX_RANGE = std::stod(argv[3]); } TestVoxelMapFromTUM( argv[1], gtFile, std::stod(argv[2]), VOXELMAP_MAX_RANGE); return 0; } catch (const std::exception& e) { std::cout << "Exception: " << e.what() << std::endl; return -1; } }