Detailed Description
template<class GRAPH_T = typename mrpt::graphs::CNetworkOfPoses2DInf>
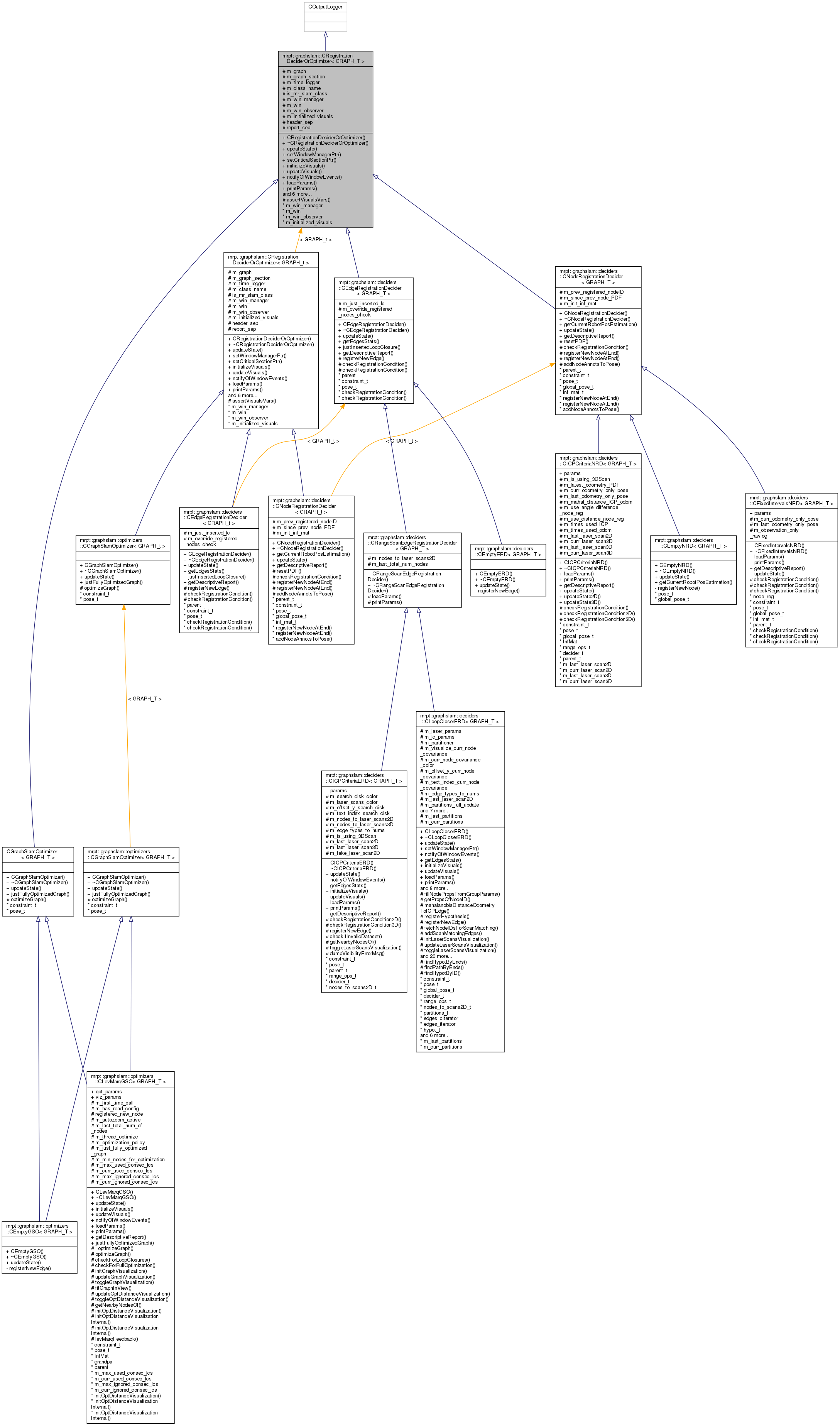
class mrpt::graphslam::CRegistrationDeciderOrOptimizer< GRAPH_T >
Interface for implementing node/edge registration deciders or optimizer classes.
Specific interfaces - for implementing node/edge deciders / optimizers - can inherit from CRegistrationDeciderOrOptimizer so that they can make use of the generic methods defined in the latter.
- Note
- Convention: For the already implemented deciders/optimizers the following naming convention has been used:
- NRD: Node Registration Decider class
- ERD: Edge Registration Decider class
- GSO: GraphSlam Optimizer class
Definition at line 43 of file CRegistrationDeciderOrOptimizer.h.
#include <mrpt/graphslam/interfaces/CRegistrationDeciderOrOptimizer.h>
Public Member Functions | |
| CRegistrationDeciderOrOptimizer () | |
| Ctor More... | |
| virtual | ~CRegistrationDeciderOrOptimizer () |
| virtual bool | updateState (mrpt::obs::CActionCollectionPtr action, mrpt::obs::CSensoryFramePtr observations, mrpt::obs::CObservationPtr observation)=0 |
| Generic method for fetching the incremental action-observations (or observation-only) measurements. More... | |
| virtual void | setWindowManagerPtr (mrpt::graphslam::CWindowManager *win_manager) |
| Fetch a CWindowManager pointer. More... | |
| virtual void | setCriticalSectionPtr (mrpt::synch::CCriticalSection *graph_section) |
| Fetch a mrpt::synch::CCriticalSection for locking the GRAPH_T resource. More... | |
| virtual void | initializeVisuals () |
| Initialize visual objects in CDisplayWindow (e.g. More... | |
| virtual void | updateVisuals () |
| Update the relevant visual features in CDisplayWindow. More... | |
| virtual void | notifyOfWindowEvents (const std::map< std::string, bool > &events_occurred) |
| Get a list of the window events that happened since the last call. More... | |
| virtual void | loadParams (const std::string &source_fname) |
| Load the necessary for the decider/optimizer configuration parameters. More... | |
| virtual void | printParams () const |
| Print the problem parameters - relevant to the decider/optimizer to the screen in a unified/compact way. More... | |
| virtual void | getDescriptiveReport (std::string *report_str) const |
| Fill the provided string with a detailed report of the decider/optimizer state. More... | |
| virtual void | setGraphPtr (GRAPH_T *graph) |
| Fetch the graph on which the decider/optimizer will work on. More... | |
| virtual void | initializeLoggers (const std::string &name) |
| Initialize the COutputLogger, CTimeLogger instances given the name of the decider/optimizer at hand. More... | |
| virtual void | setClassName (const std::string &name) |
| bool | isMultiRobotSlamClass () |
| std::string | getClassName () const |
Protected Member Functions | |
| virtual void | assertVisualsVars () |
| Handy function for making all the visuals assertions in a compact manner. More... | |
Protected Attributes | |
| GRAPH_T * | m_graph |
| Pointer to the graph that is under construction. More... | |
| mrpt::synch::CCriticalSection * | m_graph_section |
| mrpt::utils::CTimeLogger | m_time_logger |
| Time logger instance. More... | |
| std::string | m_class_name |
| Name of the class instance. More... | |
| bool | is_mr_slam_class |
| Boolean indicating if the current class can be used in multi-robot SLAM operations. More... | |
Visuals-related variables methods | |
| mrpt::graphslam::CWindowManager * | m_win_manager |
| Pointer to the CWindowManager object used to store visuals-related instances. More... | |
| mrpt::gui::CDisplayWindow3D * | m_win |
| Window to use. More... | |
| mrpt::graphslam::CWindowObserver * | m_win_observer |
| CWindowObserver object for monitoring various visual-oriented events. More... | |
| bool | m_initialized_visuals |
Static Protected Attributes | |
| static const std::string | header_sep = std::string(80, '-') |
| Separator string to be used in debugging messages. More... | |
| static const std::string | report_sep = std::string(2, '\n') |
Constructor & Destructor Documentation
◆ CRegistrationDeciderOrOptimizer()
| mrpt::graphslam::CRegistrationDeciderOrOptimizer< GRAPH_T >::CRegistrationDeciderOrOptimizer | ( | ) |
Ctor
Definition at line 21 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ ~CRegistrationDeciderOrOptimizer()
|
virtual |
Definition at line 33 of file CRegistrationDeciderOrOptimizer_impl.h.
Member Function Documentation
◆ assertVisualsVars()
|
protectedvirtual |
Handy function for making all the visuals assertions in a compact manner.
Definition at line 87 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ getClassName()
|
inline |
Definition at line 138 of file CRegistrationDeciderOrOptimizer.h.
◆ getDescriptiveReport()
|
virtual |
Fill the provided string with a detailed report of the decider/optimizer state.
Report should include (part of) the following:
- Timing of important methods
- Properties fo class at the current time
- Logging of commands until current time
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_t >, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T >, and mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_t >.
Definition at line 116 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().
◆ initializeLoggers()
|
virtual |
Initialize the COutputLogger, CTimeLogger instances given the name of the decider/optimizer at hand.
Definition at line 38 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::CICPCriteriaERD(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::CLevMarqGSO(), and mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::CLoopCloserERD().
◆ initializeVisuals()
|
virtual |
Initialize visual objects in CDisplayWindow (e.g.
add an object to scene).
- Exceptions
-
std::exception If the method is called without having first provided a CDisplayWindow3D* to the class instance
- See also
- setWindowManagerPtr, updateVisuals
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 81 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initializeVisuals().
◆ isMultiRobotSlamClass()
| bool mrpt::graphslam::CRegistrationDeciderOrOptimizer< GRAPH_T >::isMultiRobotSlamClass | ( | ) |
Definition at line 132 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ loadParams()
|
virtual |
Load the necessary for the decider/optimizer configuration parameters.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, and mrpt::graphslam::deciders::CRangeScanEdgeRegistrationDecider< GRAPH_T >.
Definition at line 105 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ notifyOfWindowEvents()
|
virtual |
Get a list of the window events that happened since the last call.
Method in derived classes is automatically called from the CGraphSlamEngine_t instance. After that, decider/optimizer should just fetch the parameters that it is interested in.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 99 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::notifyOfWindowEvents(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::notifyOfWindowEvents().
◆ printParams()
|
virtual |
Print the problem parameters - relevant to the decider/optimizer to the screen in a unified/compact way.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, and mrpt::graphslam::deciders::CRangeScanEdgeRegistrationDecider< GRAPH_T >.
Definition at line 111 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::printParams(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ setClassName()
|
virtual |
Definition at line 52 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setCriticalSectionPtr()
|
virtual |
Fetch a mrpt::synch::CCriticalSection for locking the GRAPH_T resource.
Handy for realising multithreading in the derived classes.
- Warning
- Beware that prior to the decider/optimizer public method call, the CCriticalSection will already be locked from CGraphSlamEngine_t instance, but this isn't effective in multithreaded implementations where the decider/optimizer itself has to lock the function at which the extra thread runs.
Definition at line 73 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setGraphPtr()
|
virtual |
Fetch the graph on which the decider/optimizer will work on.
Definition at line 124 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setWindowManagerPtr()
|
virtual |
Fetch a CWindowManager pointer.
CWindowManager instance should contain a CDisplayWindow3D* and, optionally, a CWindowObserver pointer so that interaction with the window is possible
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >.
Definition at line 61 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ updateState()
|
pure virtual |
Generic method for fetching the incremental action-observations (or observation-only) measurements.
- Returns
- True if operation was successful. Criteria for Success depend on the decider/optimizer implementing this method
Implemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_t >, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T >, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_t >, mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_t >, mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T >, mrpt::graphslam::deciders::CEmptyNRD< GRAPH_T >, mrpt::graphslam::deciders::CEmptyERD< GRAPH_T >, and mrpt::graphslam::optimizers::CEmptyGSO< GRAPH_T >.
◆ updateVisuals()
|
virtual |
Update the relevant visual features in CDisplayWindow.
- Exceptions
-
std::exception If the method is called without having first provided a CDisplayWindow3D* to the class instance
- See also
- setWindowManagerPtr, initializeVisuals
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 94 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateVisuals().
Member Data Documentation
◆ header_sep
|
staticprotected |
Separator string to be used in debugging messages.
Definition at line 175 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().
◆ is_mr_slam_class
|
protected |
Boolean indicating if the current class can be used in multi-robot SLAM operations.
Definition at line 171 of file CRegistrationDeciderOrOptimizer.h.
◆ m_class_name
|
protected |
Name of the class instance.
Definition at line 167 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::CRegistrationDeciderOrOptimizer< GRAPH_t >::getClassName().
◆ m_graph
|
protected |
Pointer to the graph that is under construction.
Definition at line 146 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::_optimizeGraph(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::checkForLoopClosures(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition2D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition3D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getNearbyNodesOf(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getNearbyNodesOf(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::registerNewEdge(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateState(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateState(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_graph_section
|
protected |
Definition at line 147 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::optimizeGraph().
◆ m_initialized_visuals
|
protected |
Definition at line 161 of file CRegistrationDeciderOrOptimizer.h.
◆ m_time_logger
|
protected |
Time logger instance.
Definition at line 165 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::_optimizeGraph(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition2D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition3D(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::updateState(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_win
|
protected |
Window to use.
Definition at line 157 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::fitGraphInView(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::toggleGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::toggleLaserScansVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::toggleOptDistanceVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_win_manager
|
protected |
Pointer to the CWindowManager object used to store visuals-related instances.
Definition at line 155 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::toggleLaserScansVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization().
◆ m_win_observer
|
protected |
CWindowObserver object for monitoring various visual-oriented events.
Definition at line 160 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization().
◆ report_sep
|
staticprotected |
Definition at line 176 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().