Detailed Description
template<int DIM>
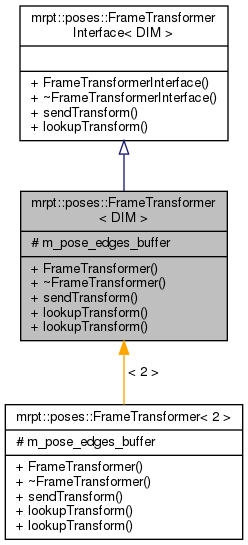
class mrpt::poses::FrameTransformer< DIM >
See docs in FrameTransformerInterface.
This class is an implementation for standalone (non ROS) applications.
- See also
- FrameTransformerInterface
Definition at line 85 of file FrameTransformer.h.
#include <mrpt/poses/FrameTransformer.h>
Classes | |
| struct | TF_TreeEdge |
Public Types | |
| typedef FrameTransformerInterface< DIM > | base_t |
| typedef SE_traits< DIM >::pose_t | pose_t |
| This will be mapped to CPose2D (DIM=2) or CPose3D (DIM=3) More... | |
| typedef SE_traits< DIM >::lightweight_pose_t | lightweight_pose_t |
| This will be mapped to mrpt::math::TPose2D (DIM=2) or mrpt::math::TPose3D (DIM=3) More... | |
Public Member Functions | |
| FrameTransformer () | |
| ~FrameTransformer () | |
| virtual void | sendTransform (const std::string &parent_frame, const std::string &child_frame, const typename base_t::pose_t &child_wrt_parent, const mrpt::system::TTimeStamp ×tamp=mrpt::system::now()) MRPT_OVERRIDE |
| virtual FrameLookUpStatus | lookupTransform (const std::string &target_frame, const std::string &source_frame, typename base_t::lightweight_pose_t &child_wrt_parent, const mrpt::system::TTimeStamp query_time=INVALID_TIMESTAMP, const double timeout_secs=.0) MRPT_OVERRIDE |
Queries the current pose of target_frame wrt ("as seen from") source_frame. More... | |
| FrameLookUpStatus | lookupTransform (const std::string &target_frame, const std::string &source_frame, typename base_t::pose_t &child_wrt_parent, const mrpt::system::TTimeStamp query_time=INVALID_TIMESTAMP, const double timeout_secs=.0) |
| virtual void | sendTransform (const std::string &parent_frame, const std::string &child_frame, const pose_t &child_wrt_parent, const mrpt::system::TTimeStamp ×tamp=mrpt::system::now())=0 |
| Publish a time-stampped transform between two frames. More... | |
Protected Types | |
| typedef std::map< std::string, typename mrpt::aligned_containers< std::string, TF_TreeEdge >::map_t > | pose_tree_t |
Protected Attributes | |
| pose_tree_t | m_pose_edges_buffer |
Member Typedef Documentation
◆ base_t
| typedef FrameTransformerInterface<DIM> mrpt::poses::FrameTransformer< DIM >::base_t |
Definition at line 88 of file FrameTransformer.h.
◆ lightweight_pose_t
|
inherited |
This will be mapped to mrpt::math::TPose2D (DIM=2) or mrpt::math::TPose3D (DIM=3)
Definition at line 52 of file FrameTransformer.h.
◆ pose_t
|
inherited |
This will be mapped to CPose2D (DIM=2) or CPose3D (DIM=3)
Definition at line 51 of file FrameTransformer.h.
◆ pose_tree_t
|
protected |
Definition at line 131 of file FrameTransformer.h.
Constructor & Destructor Documentation
◆ FrameTransformer()
| FrameTransformer::FrameTransformer | ( | ) |
Definition at line 41 of file FrameTransformer.cpp.
◆ ~FrameTransformer()
| FrameTransformer::~FrameTransformer | ( | ) |
Definition at line 46 of file FrameTransformer.cpp.
Member Function Documentation
◆ lookupTransform() [1/2]
|
virtual |
Queries the current pose of target_frame wrt ("as seen from") source_frame.
It tries to return the pose at the given timepoint, unless it is INVALID_TIMESTAMP (default), which means returning the latest know transformation.
Implements mrpt::poses::FrameTransformerInterface< DIM >.
Definition at line 65 of file FrameTransformer.cpp.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and run_tf_test1().
◆ lookupTransform() [2/2]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
- Parameters
-
timeout_secs Timeout
Definition at line 99 of file FrameTransformer.h.
◆ sendTransform() [1/2]
|
pure virtualinherited |
Publish a time-stampped transform between two frames.
◆ sendTransform() [2/2]
|
virtual |
Definition at line 52 of file FrameTransformer.cpp.
Referenced by run_tf_test1().
Member Data Documentation
◆ m_pose_edges_buffer
|
protected |
Definition at line 132 of file FrameTransformer.h.