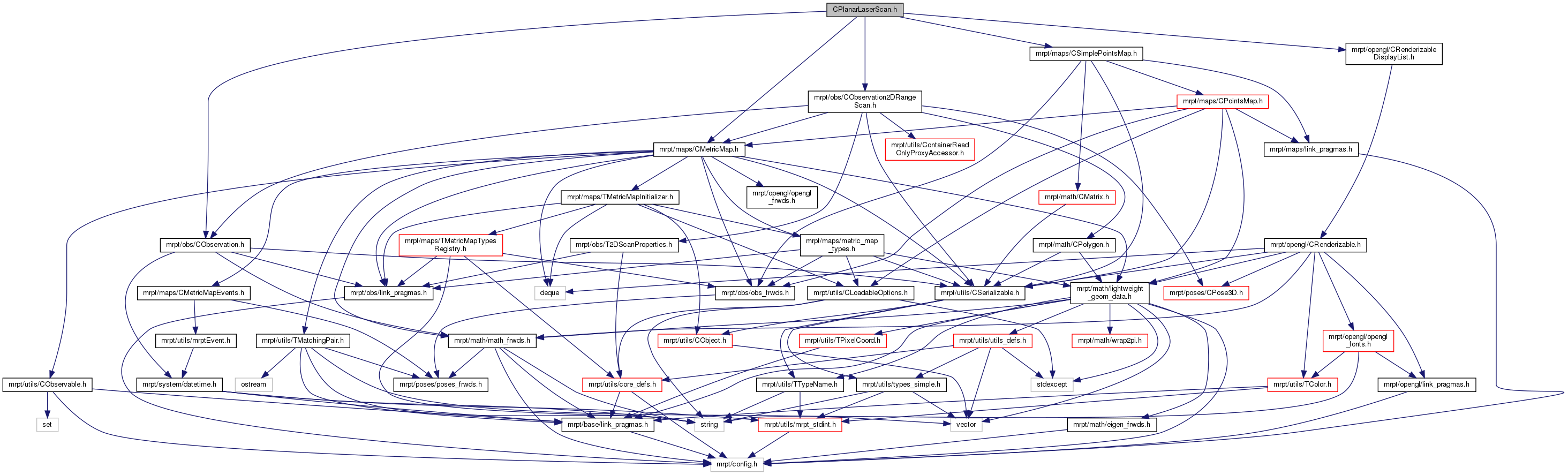
#include <mrpt/opengl/CRenderizableDisplayList.h>#include <mrpt/maps/CMetricMap.h>#include <mrpt/obs/CObservation.h>#include <mrpt/obs/CObservation2DRangeScan.h>#include <mrpt/maps/CSimplePointsMap.h>
Include dependency graph for CPlanarLaserScan.h:
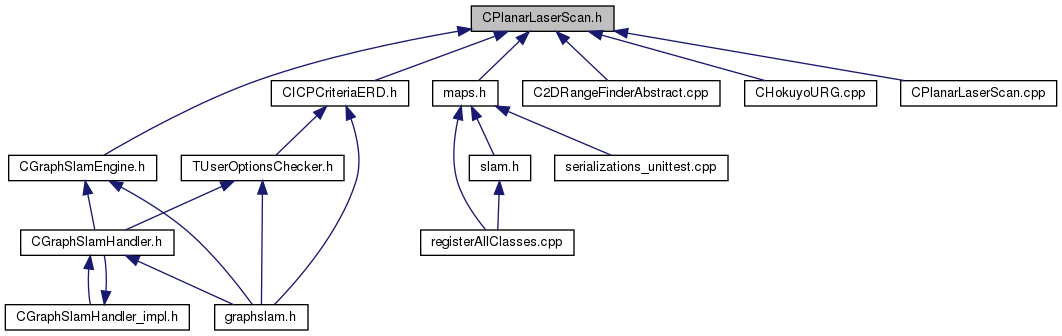
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::opengl::CPlanarLaserScan |
| This object renders a 2D laser scan by means of three elements: the points, the line along end-points and the 2D scanned surface. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::opengl | |
| The namespace for 3D scene representation and rendering. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::opengl::operator>> (mrpt::utils::CStream &in, CPlanarLaserScanPtr &pObj) |