Detailed Description
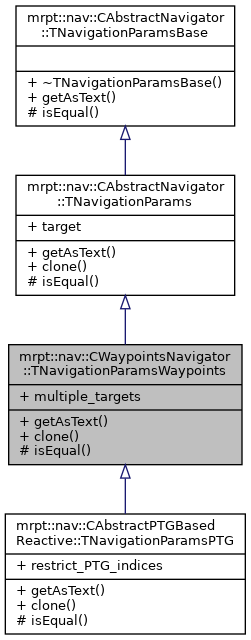
The struct for configuring navigation requests to CWaypointsNavigator and derived classes.
Definition at line 45 of file CWaypointsNavigator.h.
#include <mrpt/nav/reactive/CWaypointsNavigator.h>
Public Member Functions | |
| virtual std::string | getAsText () const override |
| Gets navigation params as a human-readable format. More... | |
| virtual std::unique_ptr< TNavigationParams > | clone () const override |
Public Attributes | |
| std::vector< mrpt::nav::CAbstractNavigator::TargetInfo > | multiple_targets |
| If not empty, this will prevail over the base class single goal target. More... | |
| TargetInfo | target |
| Navigation target. More... | |
Protected Member Functions | |
| virtual bool | isEqual (const CAbstractNavigator::TNavigationParamsBase &o) const override |
Member Function Documentation
◆ clone()
|
inlineoverridevirtual |
Reimplemented from mrpt::nav::CAbstractNavigator::TNavigationParams.
Reimplemented in mrpt::nav::CAbstractPTGBasedReactive::TNavigationParamsPTG.
Definition at line 56 of file CWaypointsNavigator.h.
◆ getAsText()
|
overridevirtual |
Gets navigation params as a human-readable format.
Reimplemented from mrpt::nav::CAbstractNavigator::TNavigationParams.
Reimplemented in mrpt::nav::CAbstractPTGBasedReactive::TNavigationParamsPTG.
Definition at line 19 of file CWaypointsNavigator.cpp.
References mrpt::format().
◆ isEqual()
|
overrideprotectedvirtual |
Reimplemented from mrpt::nav::CAbstractNavigator::TNavigationParams.
Reimplemented in mrpt::nav::CAbstractPTGBasedReactive::TNavigationParamsPTG.
Definition at line 35 of file CWaypointsNavigator.cpp.
References mrpt::nav::CAbstractNavigator::TNavigationParams::isEqual().
Member Data Documentation
◆ multiple_targets
| std::vector<mrpt::nav::CAbstractNavigator::TargetInfo> mrpt::nav::CWaypointsNavigator::TNavigationParamsWaypoints::multiple_targets |
If not empty, this will prevail over the base class single goal target.
Semantic is: any of these targets will be good for heading the robot towards them, but the priority is for the latest ones in the sequence.
Definition at line 53 of file CWaypointsNavigator.h.
Referenced by mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ target
|
inherited |
Navigation target.
Definition at line 121 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), run_rnav_test(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().