Detailed Description
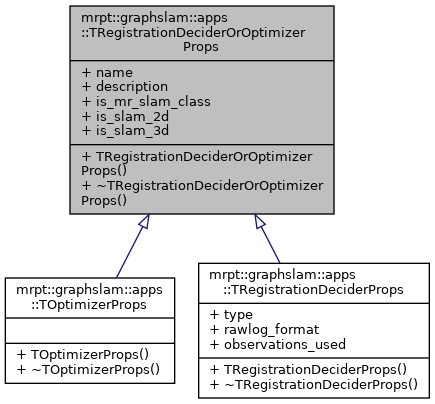
Properties struct for both the Registration Decider and Optimizer classes.
Definition at line 40 of file TUserOptionsChecker.h.
#include <mrpt/graphslam/apps_related/TUserOptionsChecker.h>
Public Member Functions | |
| TRegistrationDeciderOrOptimizerProps () | |
| ~TRegistrationDeciderOrOptimizerProps () | |
Public Attributes | |
| std::string | name |
| Name of the decider or optimizer class. More... | |
| std::string | description |
| General description of the decicder or optimizer class. More... | |
| bool | is_mr_slam_class |
| Class indicating if the current decider/optimizer class can be used in a multi-robot SLAM operation. More... | |
| bool | is_slam_2d |
| bool | is_slam_3d |
Constructor & Destructor Documentation
◆ TRegistrationDeciderOrOptimizerProps()
|
inline |
Definition at line 42 of file TUserOptionsChecker.h.
◆ ~TRegistrationDeciderOrOptimizerProps()
|
inline |
Definition at line 51 of file TUserOptionsChecker.h.
Member Data Documentation
◆ description
| std::string mrpt::graphslam::apps::TRegistrationDeciderOrOptimizerProps::description |
General description of the decicder or optimizer class.
Definition at line 56 of file TUserOptionsChecker.h.
Referenced by mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpOptimizersToConsole(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpRegistrarsToConsole(), and mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::populateDeciderOptimizerProperties().
◆ is_mr_slam_class
| bool mrpt::graphslam::apps::TRegistrationDeciderOrOptimizerProps::is_mr_slam_class |
Class indicating if the current decider/optimizer class can be used in a multi-robot SLAM operation.
Definition at line 61 of file TUserOptionsChecker.h.
Referenced by mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpOptimizersToConsole(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpRegistrarsToConsole(), and mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::populateDeciderOptimizerProperties().
◆ is_slam_2d
| bool mrpt::graphslam::apps::TRegistrationDeciderOrOptimizerProps::is_slam_2d |
Definition at line 62 of file TUserOptionsChecker.h.
Referenced by mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkOptimizerExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkRegistrationDeciderExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpOptimizersToConsole(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpRegistrarsToConsole(), and mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::populateDeciderOptimizerProperties().
◆ is_slam_3d
| bool mrpt::graphslam::apps::TRegistrationDeciderOrOptimizerProps::is_slam_3d |
Definition at line 63 of file TUserOptionsChecker.h.
Referenced by mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkOptimizerExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkRegistrationDeciderExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpOptimizersToConsole(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpRegistrarsToConsole(), and mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::populateDeciderOptimizerProperties().
◆ name
| std::string mrpt::graphslam::apps::TRegistrationDeciderOrOptimizerProps::name |
Name of the decider or optimizer class.
Definition at line 54 of file TUserOptionsChecker.h.
Referenced by mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkOptimizerExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::checkRegistrationDeciderExists(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpOptimizersToConsole(), mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::dumpRegistrarsToConsole(), and mrpt::graphslam::apps::TUserOptionsChecker< mrpt::graphs::CNetworkOfPoses2DInf >::populateDeciderOptimizerProperties().