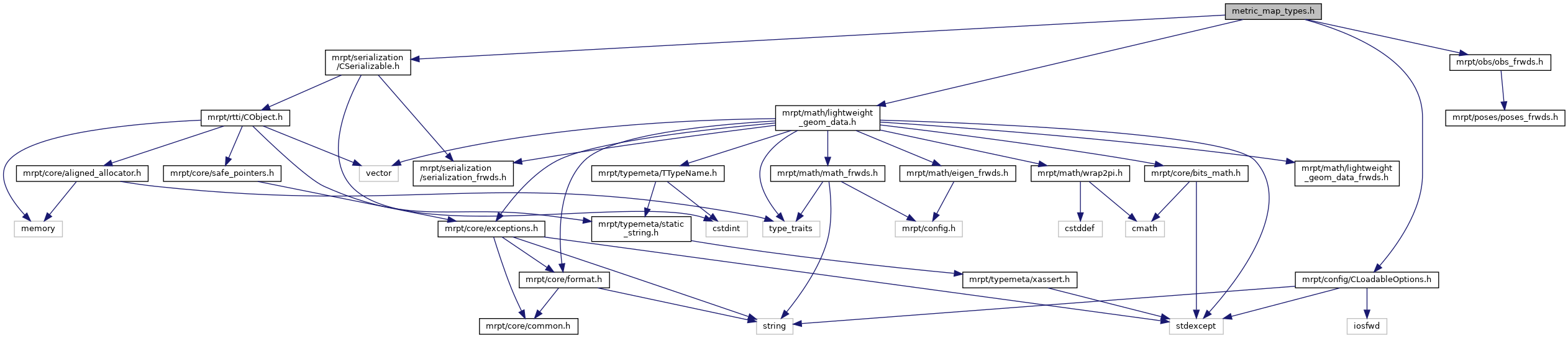
#include <mrpt/config/CLoadableOptions.h>#include <mrpt/serialization/CSerializable.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/obs/obs_frwds.h>
Include dependency graph for metric_map_types.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::maps::TMatchingParams |
| Parameters for the determination of matchings between point clouds, etc. More... | |
| struct | mrpt::maps::TMatchingExtraResults |
| Additional results from the determination of matchings between point clouds, etc., apart from the pairings themselves. More... | |
| struct | mrpt::maps::TMatchingRatioParams |
| Parameters for CMetricMap::compute3DMatchingRatio() More... | |
| class | mrpt::maps::TMapGenericParams |
| Common params to all maps derived from mrpt::maps::CMetricMap More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |