Detailed Description
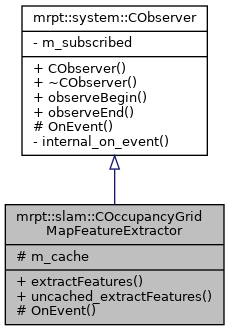
A class for detecting features from occupancy grid maps.
The main method is "COccupancyGridMapFeatureExtractor::extractFeatures()", which makes use of an advanced cache mechanism to avoid redoing work when applied several times on the same occupancy grid maps (unless they changed in the meanwhile).
For an uncached version (which is a static method that can be called without instantiating COccupancyGridMapFeatureExtractor) see COccupancyGridMapFeatureExtractor::uncached_extractFeatures()
Definition at line 35 of file COccupancyGridMapFeatureExtractor.h.
#include <mrpt/slam/COccupancyGridMapFeatureExtractor.h>
Public Member Functions | |
| void | extractFeatures (const mrpt::maps::COccupancyGridMap2D &grid, mrpt::maps::CLandmarksMap &outMap, const size_t number_of_features, const mrpt::vision::TDescriptorType descriptors, const mrpt::vision::CFeatureExtraction::TOptions &feat_options) |
| Computes a set of distinctive landmarks from an occupancy grid, and store them (previous content is not erased!) into the given landmarks map. More... | |
| void | observeBegin (CObservable &obj) |
| Starts the subscription of this observer to the given object. More... | |
| void | observeEnd (CObservable &obj) |
| Ends the subscription of this observer to the given object (note that there is no need to call this method, since the destruction of the first of observer/observed will put an end to the process. More... | |
Static Public Member Functions | |
| static void | uncached_extractFeatures (const mrpt::maps::COccupancyGridMap2D &grid, mrpt::maps::CLandmarksMap &outMap, const size_t number_of_features, const mrpt::vision::TDescriptorType descriptors, const mrpt::vision::CFeatureExtraction::TOptions &feat_options) |
| Computes a set of distinctive landmarks from an occupancy grid, and store them (previous content is not erased!) into the given landmarks map. More... | |
Protected Types | |
| using | TCache = std::map< const mrpt::maps::COccupancyGridMap2D *, mrpt::maps::CLandmarksMap::Ptr > |
Protected Member Functions | |
| void | OnEvent (const mrpt::system::mrptEvent &e) |
| This will receive the events from maps in order to purge the cache. More... | |
Protected Attributes | |
| TCache | m_cache |
| A cache of already computed maps. More... | |
Private Member Functions | |
| void | internal_on_event (const mrptEvent &e) |
Private Attributes | |
| std::set< CObservable * > | m_subscribed |
Member Typedef Documentation
◆ TCache
|
protected |
Definition at line 72 of file COccupancyGridMapFeatureExtractor.h.
Member Function Documentation
◆ extractFeatures()
| void COccupancyGridMapFeatureExtractor::extractFeatures | ( | const mrpt::maps::COccupancyGridMap2D & | grid, |
| mrpt::maps::CLandmarksMap & | outMap, | ||
| const size_t | number_of_features, | ||
| const mrpt::vision::TDescriptorType | descriptors, | ||
| const mrpt::vision::CFeatureExtraction::TOptions & | feat_options | ||
| ) |
Computes a set of distinctive landmarks from an occupancy grid, and store them (previous content is not erased!) into the given landmarks map.
Landmarks type can be any declared in mrpt::vision::CFeatureExtraction::TOptions
- Note
- See the paper "..."
- See also
- uncached_extractFeatures
Definition at line 81 of file COccupancyGridMapFeatureExtractor.cpp.
◆ internal_on_event()
Definition at line 47 of file CObserver.cpp.
◆ observeBegin()
|
inherited |
Starts the subscription of this observer to the given object.
- See also
- observeEnd
Definition at line 26 of file CObserver.cpp.
Referenced by CGraphSlamHandler< GRAPH_T >::initVisualization().
◆ observeEnd()
|
inherited |
Ends the subscription of this observer to the given object (note that there is no need to call this method, since the destruction of the first of observer/observed will put an end to the process.
- See also
- observeBegin
Definition at line 36 of file CObserver.cpp.
◆ OnEvent()
|
protectedvirtual |
This will receive the events from maps in order to purge the cache.
Implements mrpt::system::CObserver.
Definition at line 117 of file COccupancyGridMapFeatureExtractor.cpp.
References mrpt::system::mrptEvent::isOfType(), and mrpt::maps::mrptEventMetricMapClear::source_map.
◆ uncached_extractFeatures()
|
static |
Computes a set of distinctive landmarks from an occupancy grid, and store them (previous content is not erased!) into the given landmarks map.
Landmarks type can be any declared in mrpt::vision::CFeatureExtraction::TOptions
- Note
- See the paper "..."
- See also
- uncached_extractFeatures
Definition at line 21 of file COccupancyGridMapFeatureExtractor.cpp.
References mrpt::vision::CFeatureList::begin(), mrpt::vision::CFeatureExtraction::computeDescriptors(), mrpt::vision::descAny, mrpt::vision::CFeatureExtraction::detectFeatures(), mrpt::vision::CFeatureList::end(), mrpt::maps::CLandmark::features, mrpt::maps::COccupancyGridMap2D::getAsImageFiltered(), mrpt::maps::COccupancyGridMap2D::getResolution(), mrpt::maps::COccupancyGridMap2D::getXMin(), mrpt::maps::COccupancyGridMap2D::getYMin(), mrpt::maps::CLandmark::ID, mrpt::maps::CLandmarksMap::landmarks, MRPT_END_WITH_CLEAN_UP, MRPT_START, mrpt::vision::CFeatureExtraction::options, mrpt::vision::CFeatureExtraction::TOptions::patchSize, mrpt::maps::CLandmark::pose_cov_11, mrpt::maps::CLandmark::pose_cov_12, mrpt::maps::CLandmark::pose_cov_13, mrpt::maps::CLandmark::pose_cov_22, mrpt::maps::CLandmark::pose_cov_23, mrpt::maps::CLandmark::pose_cov_33, mrpt::maps::CLandmark::pose_mean, mrpt::maps::CLandmarksMap::TCustomSequenceLandmarks::push_back(), mrpt::maps::COccupancyGridMap2D::saveMetricMapRepresentationToFile(), mrpt::maps::CLandmark::seenTimesCount, mrpt::square(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Member Data Documentation
◆ m_cache
|
protected |
A cache of already computed maps.
Definition at line 74 of file COccupancyGridMapFeatureExtractor.h.
◆ m_subscribed
|
privateinherited |
Definition at line 55 of file CObserver.h.