Detailed Description
template<class POINTMAPTYPE, typename coords_t>
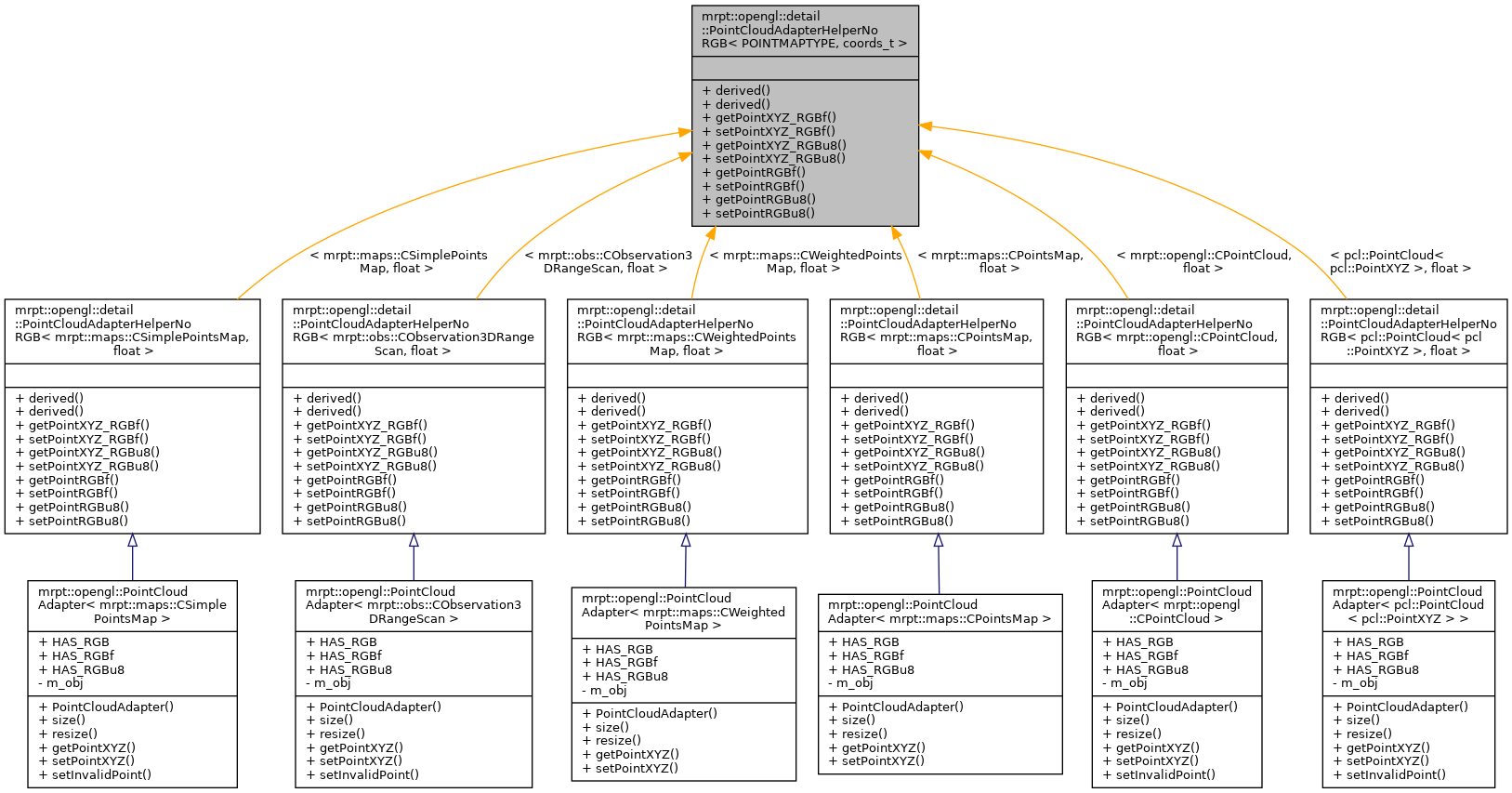
class mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< POINTMAPTYPE, coords_t >
A helper base class for those PointCloudAdapter<> which do not handle RGB data; it declares needed interface methods which fall back to XYZ-only methods.
Definition at line 49 of file pointcloud_adapters.h.
#include <mrpt/opengl/pointcloud_adapters.h>
Public Types | |
| using | Derived = PointCloudAdapter< POINTMAPTYPE > |
Public Member Functions | |
| Derived & | derived () |
| const Derived & | derived () const |
| template<typename T > | |
| void | getPointXYZ_RGBf (const size_t idx, T &x, T &y, T &z, float &r, float &g, float &b) const |
| Get XYZ_RGBf coordinates of i'th point. More... | |
| void | setPointXYZ_RGBf (const size_t idx, const coords_t x, const coords_t y, const coords_t z, const float r, const float g, const float b) |
| Set XYZ_RGBf coordinates of i'th point. More... | |
| template<typename T > | |
| void | getPointXYZ_RGBu8 (const size_t idx, T &x, T &y, T &z, uint8_t &r, uint8_t &g, uint8_t &b) const |
| Get XYZ_RGBu8 coordinates of i'th point. More... | |
| void | setPointXYZ_RGBu8 (const size_t idx, const coords_t x, const coords_t y, const coords_t z, const uint8_t r, const uint8_t g, const uint8_t b) |
| Set XYZ_RGBu8 coordinates of i'th point. More... | |
| void | getPointRGBf (const size_t idx, float &r, float &g, float &b) const |
| Get RGBf color of i'th point. More... | |
| void | setPointRGBf (const size_t idx, const float r, const float g, const float b) |
| Set XYZ_RGBf coordinates of i'th point. More... | |
| void | getPointRGBu8 (const size_t idx, uint8_t &r, uint8_t &g, uint8_t &b) const |
| Get RGBu8 color of i'th point. More... | |
| void | setPointRGBu8 (const size_t idx, const uint8_t r, const uint8_t g, const uint8_t b) |
| Set RGBu8 coordinates of i'th point. More... | |
Member Typedef Documentation
◆ Derived
| using mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< POINTMAPTYPE, coords_t >::Derived = PointCloudAdapter<POINTMAPTYPE> |
Definition at line 52 of file pointcloud_adapters.h.
Member Function Documentation
◆ derived() [1/2]
|
inline |
Definition at line 54 of file pointcloud_adapters.h.
Referenced by mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< pcl::PointCloud< pcl::PointXYZ >, float >::getPointXYZ_RGBf(), mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< pcl::PointCloud< pcl::PointXYZ >, float >::getPointXYZ_RGBu8(), mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< pcl::PointCloud< pcl::PointXYZ >, float >::setPointXYZ_RGBf(), and mrpt::opengl::detail::PointCloudAdapterHelperNoRGB< pcl::PointCloud< pcl::PointXYZ >, float >::setPointXYZ_RGBu8().
◆ derived() [2/2]
|
inline |
Definition at line 55 of file pointcloud_adapters.h.
◆ getPointRGBf()
|
inline |
Get RGBf color of i'th point.
Definition at line 100 of file pointcloud_adapters.h.
◆ getPointRGBu8()
|
inline |
Get RGBu8 color of i'th point.
Definition at line 117 of file pointcloud_adapters.h.
◆ getPointXYZ_RGBf()
|
inline |
Get XYZ_RGBf coordinates of i'th point.
Definition at line 62 of file pointcloud_adapters.h.
◆ getPointXYZ_RGBu8()
|
inline |
Get XYZ_RGBu8 coordinates of i'th point.
Definition at line 81 of file pointcloud_adapters.h.
◆ setPointRGBf()
|
inline |
Set XYZ_RGBf coordinates of i'th point.
Definition at line 107 of file pointcloud_adapters.h.
◆ setPointRGBu8()
|
inline |
Set RGBu8 coordinates of i'th point.
Definition at line 124 of file pointcloud_adapters.h.
◆ setPointXYZ_RGBf()
|
inline |
Set XYZ_RGBf coordinates of i'th point.
Definition at line 69 of file pointcloud_adapters.h.
◆ setPointXYZ_RGBu8()
|
inline |
Set XYZ_RGBu8 coordinates of i'th point.
Definition at line 89 of file pointcloud_adapters.h.