Detailed Description
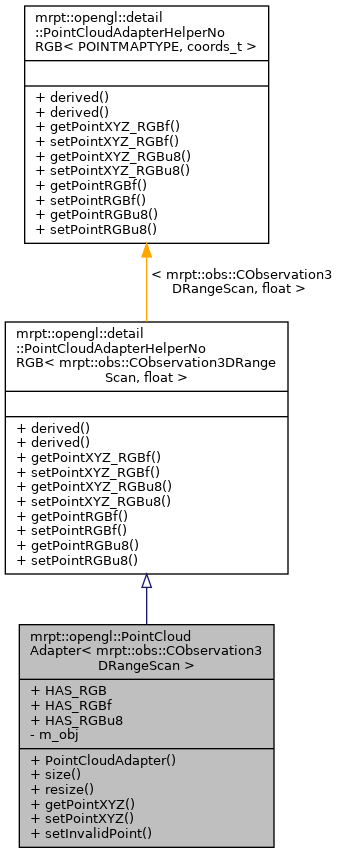
Specialization mrpt::opengl::PointCloudAdapter<CObservation3DRangeScan>
Definition at line 801 of file CObservation3DRangeScan.h.
#include <mrpt/obs/CObservation3DRangeScan.h>
Public Types | |
| using | coords_t = float |
| The type of each point XYZ coordinates. More... | |
| using | Derived = PointCloudAdapter< mrpt::obs::CObservation3DRangeScan > |
Public Member Functions | |
| PointCloudAdapter (const mrpt::obs::CObservation3DRangeScan &obj) | |
| Constructor (accept a const ref for convenience) More... | |
| size_t | size () const |
| Get number of points. More... | |
| void | resize (const size_t N) |
| Set number of points (to uninitialized values) More... | |
| template<typename T > | |
| void | getPointXYZ (const size_t idx, T &x, T &y, T &z) const |
| Get XYZ coordinates of i'th point. More... | |
| void | setPointXYZ (const size_t idx, const coords_t x, const coords_t y, const coords_t z) |
| Set XYZ coordinates of i'th point. More... | |
| void | setInvalidPoint (const size_t idx) |
| Set XYZ coordinates of i'th point. More... | |
| Derived & | derived () |
| const Derived & | derived () const |
| void | getPointXYZ_RGBf (const size_t idx, T &x, T &y, T &z, float &r, float &g, float &b) const |
| Get XYZ_RGBf coordinates of i'th point. More... | |
| void | setPointXYZ_RGBf (const size_t idx, const float x, const float y, const float z, const float r, const float g, const float b) |
| Set XYZ_RGBf coordinates of i'th point. More... | |
| void | getPointXYZ_RGBu8 (const size_t idx, T &x, T &y, T &z, uint8_t &r, uint8_t &g, uint8_t &b) const |
| Get XYZ_RGBu8 coordinates of i'th point. More... | |
| void | setPointXYZ_RGBu8 (const size_t idx, const float x, const float y, const float z, const uint8_t r, const uint8_t g, const uint8_t b) |
| Set XYZ_RGBu8 coordinates of i'th point. More... | |
| void | getPointRGBf (const size_t idx, float &r, float &g, float &b) const |
| Get RGBf color of i'th point. More... | |
| void | setPointRGBf (const size_t idx, const float r, const float g, const float b) |
| Set XYZ_RGBf coordinates of i'th point. More... | |
| void | getPointRGBu8 (const size_t idx, uint8_t &r, uint8_t &g, uint8_t &b) const |
| Get RGBu8 color of i'th point. More... | |
| void | setPointRGBu8 (const size_t idx, const uint8_t r, const uint8_t g, const uint8_t b) |
| Set RGBu8 coordinates of i'th point. More... | |
Static Public Attributes | |
| static const int | HAS_RGB = 0 |
| Has any color RGB info? More... | |
| static const int | HAS_RGBf = 0 |
| Has native RGB info (as floats)? More... | |
| static const int | HAS_RGBu8 = 0 |
| Has native RGB info (as uint8_t)? More... | |
Private Attributes | |
| mrpt::obs::CObservation3DRangeScan & | m_obj |
Member Typedef Documentation
◆ coords_t
| using mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::coords_t = float |
The type of each point XYZ coordinates.
Definition at line 810 of file CObservation3DRangeScan.h.
◆ Derived
|
inherited |
Definition at line 52 of file pointcloud_adapters.h.
Constructor & Destructor Documentation
◆ PointCloudAdapter()
|
inline |
Constructor (accept a const ref for convenience)
Definition at line 819 of file CObservation3DRangeScan.h.
Member Function Documentation
◆ derived() [1/2]
|
inlineinherited |
Definition at line 54 of file pointcloud_adapters.h.
◆ derived() [2/2]
|
inlineinherited |
Definition at line 55 of file pointcloud_adapters.h.
◆ getPointRGBf()
|
inlineinherited |
Get RGBf color of i'th point.
Definition at line 100 of file pointcloud_adapters.h.
◆ getPointRGBu8()
|
inlineinherited |
Get RGBu8 color of i'th point.
Definition at line 117 of file pointcloud_adapters.h.
◆ getPointXYZ()
|
inline |
Get XYZ coordinates of i'th point.
Definition at line 834 of file CObservation3DRangeScan.h.
References mrpt::obs::CObservation3DRangeScan::points3D_x, mrpt::obs::CObservation3DRangeScan::points3D_y, and mrpt::obs::CObservation3DRangeScan::points3D_z.
◆ getPointXYZ_RGBf()
|
inlineinherited |
Get XYZ_RGBf coordinates of i'th point.
Definition at line 62 of file pointcloud_adapters.h.
◆ getPointXYZ_RGBu8()
|
inlineinherited |
Get XYZ_RGBu8 coordinates of i'th point.
Definition at line 81 of file pointcloud_adapters.h.
◆ resize()
|
inline |
Set number of points (to uninitialized values)
Definition at line 826 of file CObservation3DRangeScan.h.
References mrpt::obs::CObservation3DRangeScan::hasPoints3D, and mrpt::obs::CObservation3DRangeScan::resizePoints3DVectors().
◆ setInvalidPoint()
|
inline |
Set XYZ coordinates of i'th point.
Definition at line 849 of file CObservation3DRangeScan.h.
References THROW_EXCEPTION.
◆ setPointRGBf()
|
inlineinherited |
Set XYZ_RGBf coordinates of i'th point.
Definition at line 107 of file pointcloud_adapters.h.
◆ setPointRGBu8()
|
inlineinherited |
Set RGBu8 coordinates of i'th point.
Definition at line 124 of file pointcloud_adapters.h.
◆ setPointXYZ()
|
inline |
Set XYZ coordinates of i'th point.
Definition at line 841 of file CObservation3DRangeScan.h.
References mrpt::obs::CObservation3DRangeScan::points3D_x, mrpt::obs::CObservation3DRangeScan::points3D_y, and mrpt::obs::CObservation3DRangeScan::points3D_z.
◆ setPointXYZ_RGBf()
|
inlineinherited |
Set XYZ_RGBf coordinates of i'th point.
Definition at line 69 of file pointcloud_adapters.h.
◆ setPointXYZ_RGBu8()
|
inlineinherited |
Set XYZ_RGBu8 coordinates of i'th point.
Definition at line 89 of file pointcloud_adapters.h.
◆ size()
|
inline |
Get number of points.
Definition at line 824 of file CObservation3DRangeScan.h.
References mrpt::obs::CObservation3DRangeScan::points3D_x.
Member Data Documentation
◆ HAS_RGB
|
static |
Has any color RGB info?
Definition at line 812 of file CObservation3DRangeScan.h.
◆ HAS_RGBf
|
static |
Has native RGB info (as floats)?
Definition at line 814 of file CObservation3DRangeScan.h.
◆ HAS_RGBu8
|
static |
Has native RGB info (as uint8_t)?
Definition at line 816 of file CObservation3DRangeScan.h.
◆ m_obj
|
private |
Definition at line 806 of file CObservation3DRangeScan.h.