Detailed Description
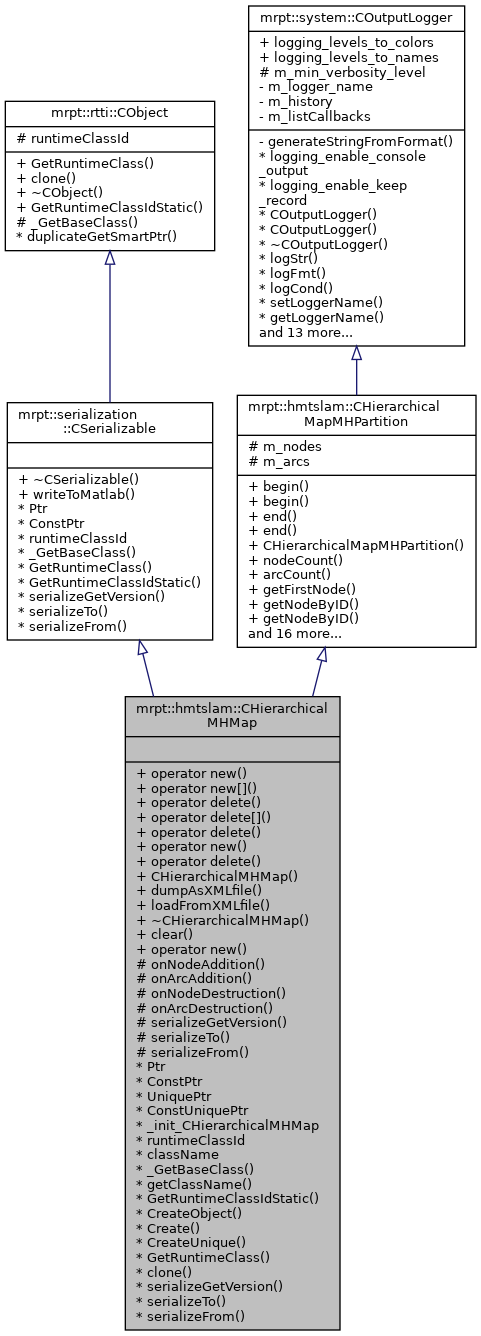
The most high level class for storing hybrid, multi-hypothesis maps in a graph-based model.
This class is used within the HMT-SLAM implementation in CHMTSLAM.
- See also
- CHMTSLAM, CHMHMapArc, CHMHMapNode, CHierarchicalMHMapPartition
Definition at line 29 of file CHierarchicalMHMap.h.
#include <mrpt/hmtslam/CHierarchicalMHMap.h>
Public Types | |
| using | iterator = TNodeList::iterator |
| using | const_iterator = TNodeList::const_iterator |
| using | TNodeIDsList = std::vector< CHMHMapNode::TNodeID > |
| A type that reprensents a sequence of node IDs. More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| CHierarchicalMHMap () | |
| Default constructor. More... | |
| void | dumpAsXMLfile (std::string fileName) const |
| Destructor. More... | |
| void | loadFromXMLfile (std::string fileName) |
| Load a graph from a XML file. More... | |
| virtual | ~CHierarchicalMHMap () |
| void | clear () |
| Erase all the contents of map (It delete all nodes/arcs objects) More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| const_iterator | begin () const |
| Returns an iterator to the first node in the graph. More... | |
| iterator | begin () |
| Returns an iterator to the first node in the graph. More... | |
| const_iterator | end () const |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| iterator | end () |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| size_t | nodeCount () const |
| Returns the number of nodes in the partition: More... | |
| size_t | arcCount () const |
| Returns the number of arcs in the partition: More... | |
| CHMHMapNode::Ptr | getFirstNode () |
| Returns the first node in the graph, or nullptr if it does not exist. More... | |
| CHMHMapNode::Ptr | getNodeByID (CHMHMapNode::TNodeID id) |
| Returns the node with the given ID, or nullptr if it does not exist. More... | |
| const CHMHMapNode::Ptr | getNodeByID (CHMHMapNode::TNodeID id) const |
| Returns the node with the given ID, or nullptr if it does not exist. More... | |
| CHMHMapNode::Ptr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist. More... | |
| const CHMHMapNode::Ptr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) const |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist. More... | |
| void | saveAreasDiagramForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID) const |
| Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc) More... | |
| void | saveAreasDiagramWithEllipsedForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, float uncertaintyExagerationFactor=1.0f, bool drawArcs=false, unsigned int numberOfIterationsForOptimalGlobalPoses=4) const |
| Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node. More... | |
| void | saveGlobalMapForMATLAB (const std::string &filName, const THypothesisID &hypothesisID, const CHMHMapNode::TNodeID &idReferenceNode) const |
| Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES: More... | |
| void | findPathBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, TArcList &out_path, bool direction=false) const |
| The Dijkstra algorithm for finding the shortest path between a pair of nodes. More... | |
| void | computeCoordinatesTransformationBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, mrpt::poses::CPose3DPDFParticles &posePDF, const THypothesisID &hypothesisID, unsigned int particlesCount=100, float additionalNoiseXYratio=0.02, float additionalNoisePhiRad=mrpt::DEG2RAD(0.1)) const |
| Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes. More... | |
| float | computeMatchProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, float &maxMatchProb, mrpt::poses::CPose3DPDFSOG &estimatedRelativePose, const THypothesisID &hypothesisID, unsigned int monteCarloSamplesPose=300) |
| Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose". More... | |
| void | findArcsBetweenNodes (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, TArcList &out_listArcs) const |
| Returns all the arcs between a pair of nodes: More... | |
| void | findArcsOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, TArcList &ret) const |
| Returns the arcs between a pair of nodes of a given type. More... | |
| CHMHMapArc::Ptr | findArcOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, bool &isInverted) const |
| Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction. More... | |
| bool | areNodesNeightbour (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, const char *requiredAnnotation=nullptr) const |
| Returns whether two nodes are "neightbour", i.e. More... | |
| void | computeGloballyConsistentNodeCoordinates (std::map< CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian, std::less< CHMHMapNode::TNodeID >, Eigen::aligned_allocator< std::pair< const CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian >>> &nodePoses, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterations=2) const |
| This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information. More... | |
| void | getAs3DScene (mrpt::opengl::COpenGLScene &outScene, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterationsForOptimalGlobalPoses=5, const bool &showRobotPoseIDs=true) const |
| Returns a 3D scene reconstruction of the hierarchical map. More... | |
| void | dumpAsText (std::vector< std::string > &s) const |
| Return a textual description of the whole graph. More... | |
| double | computeOverlapProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, const size_t &monteCarloSamples=100, const float margin_to_substract=6) const |
| Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation. More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Static Public Attributes | |
| static mrpt::system::TConsoleColor | logging_levels_to_colors [NUMBER_OF_VERBOSITY_LEVELS] |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::string | logging_levels_to_names [NUMBER_OF_VERBOSITY_LEVELS] |
| Map from VerbosityLevels to their corresponding names. More... | |
Protected Member Functions | |
| void | onNodeAddition (CHMHMapNode::Ptr &node) |
| Event handler to be called just after a node has being created: it will be added to the internal list. More... | |
| void | onArcAddition (CHMHMapArc::Ptr &arc) |
| Event handler to be called just after an arc has being created: it will be added to the internal list. More... | |
| void | onNodeDestruction (CHMHMapNode *node) |
| Event handler to be called just before a node is being destroyed: it will be removed from the internal list. More... | |
| void | onArcDestruction (CHMHMapArc *arc) |
| Event handler to be called just before an arc is being destroyed: it will be removed from the internal list. More... | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
Protected Attributes | |
| TNodeList | m_nodes |
| The internal list of nodes and arcs in the whole hierarchical model. More... | |
| TArcList | m_arcs |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Private Member Functions | |
| std::string | generateStringFromFormat (const char *fmt, va_list argp) const |
| Helper method for generating a std::string instance from printf-like arguments. More... | |
Private Attributes | |
| std::string | m_logger_name |
| std::deque< TMsg > | m_history |
| std::deque< output_logger_callback_t > | m_listCallbacks |
Friends | |
| class | CHMHMapArc |
| class | CHMHMapNode |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CHierarchicalMHMap > |
| using | ConstPtr = std::shared_ptr< const CHierarchicalMHMap > |
| using | UniquePtr = std::unique_ptr< CHierarchicalMHMap > |
| using | ConstUniquePtr = std::unique_ptr< const CHierarchicalMHMap > |
| static mrpt::rtti::CLASSINIT | _init_CHierarchicalMHMap |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CHierarchicalMHMap" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Logging methods | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
Member Typedef Documentation
◆ const_iterator
|
inherited |
Definition at line 51 of file CHierarchicalMapMHPartition.h.
◆ ConstPtr
| using mrpt::hmtslam::CHierarchicalMHMap::ConstPtr = std::shared_ptr<const CHierarchicalMHMap > |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ ConstUniquePtr
| using mrpt::hmtslam::CHierarchicalMHMap::ConstUniquePtr = std::unique_ptr<const CHierarchicalMHMap > |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ iterator
|
inherited |
Definition at line 50 of file CHierarchicalMapMHPartition.h.
◆ Ptr
| using mrpt::hmtslam::CHierarchicalMHMap::Ptr = std::shared_ptr< CHierarchicalMHMap > |
A type for the associated smart pointer
Definition at line 35 of file CHierarchicalMHMap.h.
◆ TNodeIDsList
|
inherited |
A type that reprensents a sequence of node IDs.
Definition at line 64 of file CHierarchicalMapMHPartition.h.
◆ UniquePtr
| using mrpt::hmtslam::CHierarchicalMHMap::UniquePtr = std::unique_ptr< CHierarchicalMHMap > |
Definition at line 35 of file CHierarchicalMHMap.h.
Constructor & Destructor Documentation
◆ CHierarchicalMHMap()
| CHierarchicalMHMap::CHierarchicalMHMap | ( | ) |
Default constructor.
Definition at line 29 of file CHierarchicalMHMap.cpp.
◆ ~CHierarchicalMHMap()
|
virtual |
Definition at line 33 of file CHierarchicalMHMap.cpp.
References mrpt::containers::clear().
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ arcCount()
|
inherited |
Returns the number of arcs in the partition:
Definition at line 44 of file CHierarchicalMapMHPartition.cpp.
◆ areNodesNeightbour()
|
inherited |
Returns whether two nodes are "neightbour", i.e.
have a direct arc between them
Definition at line 1072 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ begin() [1/2]
|
inlineinherited |
Returns an iterator to the first node in the graph.
Definition at line 56 of file CHierarchicalMapMHPartition.h.
References mrpt::hmtslam::CHierarchicalMapMHPartition::m_nodes.
◆ begin() [2/2]
|
inlineinherited |
Returns an iterator to the first node in the graph.
Definition at line 54 of file CHierarchicalMapMHPartition.h.
References mrpt::hmtslam::CHierarchicalMapMHPartition::m_nodes.
◆ clear()
| void CHierarchicalMHMap::clear | ( | ) |
Erase all the contents of map (It delete all nodes/arcs objects)
Definition at line 37 of file CHierarchicalMHMap.cpp.
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ computeCoordinatesTransformationBetweenNodes()
|
inherited |
Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes.
- Exceptions
-
std::exception If there is not enought information in arcs to compute the PDF
Definition at line 865 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::random::getRandomGenerator(), mrpt::bayes::CParticleFilterData< T, STORAGE >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_REF_POSEID, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::normalizeWeights(), and mrpt::poses::CPose3DPDFParticles::resetDeterministic().
◆ computeGloballyConsistentNodeCoordinates()
|
inherited |
This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information.
Global coordinates will be computed relative to the node "idReferenceNode".
- Exceptions
-
std::exception If there is any node without a pose arc, invalid (non invertible) matrixes, etc...
Definition at line 1326 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, mrpt::poses::CPose3DPDFGaussianInf::copyFrom(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::dijkstra_nodes_estimate(), mrpt::graphs::CDirectedGraph< TYPE_EDGES, EDGE_ANNOTATIONS >::insertEdgeAtEnd(), mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::nodes, mrpt::graphslam::optimize_graph_spa_levmarq(), and mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::root.
◆ computeMatchProbabilityBetweenNodes()
|
inherited |
Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose".
Definition at line 994 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ computeOverlapProbabilityBetweenNodes()
|
inherited |
Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation.
- Exceptions
-
std::exception If there is not enought information in arcs, etc...
- Parameters
-
margin_to_substract In meters, the area of each gridmap is "eroded" this amount to compensate the area in excess usually found in gridmaps.
Definition at line 1582 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, mrpt::bayes::CParticleFilterData< T, STORAGE >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, and mrpt::math::RectanglesIntersection().
◆ Create()
|
inlinestatic |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ dumpAsText()
|
inherited |
Return a textual description of the whole graph.
Definition at line 1407 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFParticles::getMean(), mrpt::poses::CPose3DPDFGaussian::mean, NODE_ANNOTATION_POSES_GRAPH, NODE_ANNOTATION_REF_POSEID, mrpt::poses::CPose3D::pitch(), RAD2DEG, mrpt::poses::CPose3D::roll(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().
◆ dumpAsXMLfile()
| void CHierarchicalMHMap::dumpAsXMLfile | ( | std::string | fileName | ) | const |
Destructor.
Save the whole graph as a XML file
Definition at line 264 of file CHierarchicalMHMap.cpp.
References ASSERT_, mrpt::db::CSimpleDatabase::createTable(), mrpt::format(), IS_CLASS, mrpt::system::os::memcpy(), mrpt::serialization::ObjectToOctetVector(), and mrpt::db::CSimpleDatabase::saveAsXML().
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 179 of file COutputLogger.cpp.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 169 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ end() [1/2]
|
inlineinherited |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 60 of file CHierarchicalMapMHPartition.h.
References mrpt::hmtslam::CHierarchicalMapMHPartition::m_nodes.
◆ end() [2/2]
|
inlineinherited |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 58 of file CHierarchicalMapMHPartition.h.
References mrpt::hmtslam::CHierarchicalMapMHPartition::m_nodes.
◆ findArcOfTypeBetweenNodes()
|
inherited |
Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction.
- Returns
- The arc, or nullptr if not found.
Definition at line 1548 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsBetweenNodes()
|
inherited |
Returns all the arcs between a pair of nodes:
Definition at line 1013 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsOfTypeBetweenNodes()
|
inherited |
Returns the arcs between a pair of nodes of a given type.
Definition at line 1042 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findPathBetweenNodes()
|
inherited |
The Dijkstra algorithm for finding the shortest path between a pair of nodes.
- Returns
- The sequence of arcs connecting the nodes.It will be empty if no path is found or when the starting and ending node coincide.
Definition at line 735 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, ASSERTMSG_, MRPT_END, and MRPT_START.
◆ generateStringFromFormat()
|
privateinherited |
Helper method for generating a std::string instance from printf-like arguments.
Definition at line 99 of file COutputLogger.cpp.
References mrpt::system::os::vsnprintf().
◆ getAs3DScene()
|
inherited |
Returns a 3D scene reconstruction of the hierarchical map.
See "computeGloballyConsistentNodeCoordinates" for the meaning of "numberOfIterationsForOptimalGlobalPoses"
Definition at line 1107 of file CHierarchicalMapMHPartition.cpp.
References mrpt::poses::CPose3D::addComponents(), mrpt::opengl::COpenGLScene::clear(), mrpt::opengl::COpenGLScene::insert(), MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, NODE_ANNOTATION_POSES_GRAPH, mrpt::poses::CPose3D::normalizeAngles(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ getClassName()
|
inlinestaticconstexpr |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ getFirstNode()
|
inherited |
Returns the first node in the graph, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 118 of file CHierarchicalMapMHPartition.cpp.
◆ getLogAsString() [1/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 148 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLogAsString() [2/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 143 of file COutputLogger.cpp.
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 184 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 190 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 132 of file COutputLogger.cpp.
Referenced by mrpt::system::COutputLogger::TMsg::TMsg().
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ getNodeByID() [1/2]
|
inherited |
Returns the node with the given ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 48 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
◆ getNodeByID() [2/2]
|
inherited |
Returns the node with the given ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 62 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
◆ getNodeByLabel() [1/2]
|
inherited |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 77 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.
◆ getNodeByLabel() [2/2]
|
inherited |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 97 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ loadFromXMLfile()
| void CHierarchicalMHMap::loadFromXMLfile | ( | std::string | fileName | ) |
Load a graph from a XML file.
Definition at line 157 of file CHierarchicalMHMap.cpp.
References COMMON_TOPOLOG_HYP, mrpt::db::CSimpleDatabase::getTable(), mrpt::db::CSimpleDatabase::loadFromXML(), NODE_ANNOTATION_PLACE_POSE, and mrpt::system::tokenize().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 120 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 287 of file COutputLogger.cpp.
References getAddress().
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 80 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logRegisterCallback()
|
inherited |
Definition at line 274 of file COutputLogger.cpp.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 61 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< mrpt::math::TPose3D, CMonteCarloLocalization3D, mrpt::bayes::particle_storage_mode::VALUE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ nodeCount()
|
inherited |
Returns the number of nodes in the partition:
Definition at line 40 of file CHierarchicalMapMHPartition.cpp.
◆ onArcAddition()
|
protected |
Event handler to be called just after an arc has being created: it will be added to the internal list.
Definition at line 145 of file CHierarchicalMHMap.cpp.
◆ onArcDestruction()
|
protected |
Event handler to be called just before an arc is being destroyed: it will be removed from the internal list.
- Note
- At *addition we use a smart pointer to assure all the implied guys use the same smrt. pnt., but at destructors the objects don't know anything but "this", thus the usage of plain pointers.
Definition at line 113 of file CHierarchicalMHMap.cpp.
◆ onNodeAddition()
|
protected |
Event handler to be called just after a node has being created: it will be added to the internal list.
Definition at line 124 of file CHierarchicalMHMap.cpp.
References ASSERT_.
◆ onNodeDestruction()
|
protected |
Event handler to be called just before a node is being destroyed: it will be removed from the internal list.
- Note
- At *addition we use a smart pointer to assure all the implied guys use the same smrt. pnt., but at destructors the objects don't know anything but "this", thus the usage of plain pointers.
Definition at line 100 of file CHierarchicalMHMap.cpp.
References mrpt::hmtslam::CHMHMapNode::getID().
◆ operator delete() [1/3]
|
inlinenoexcept |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator delete() [2/3]
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator delete[]()
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator new() [1/3]
|
inline |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator new() [3/3]
|
inlinestatic |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ operator new[]()
|
inline |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ saveAreasDiagramForMATLAB()
|
inherited |
Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc)
- The partition may be empty if no node fulfills the condition.
- All arcs STARTING at each node from the partition will be added to the partition as well.
- Levels in the hierarchy here stands for arcs of type "arcType_Belongs" only.
- See also
- CHMHMapArc Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference. ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 129 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveAreasDiagramWithEllipsedForMATLAB()
|
inherited |
Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node.
ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 308 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveGlobalMapForMATLAB()
|
inherited |
Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 487 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, and MRPT_UNUSED_PARAM.
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 57 of file CHierarchicalMHMap.cpp.
References mrpt::containers::clear(), and MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 45 of file CHierarchicalMHMap.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 46 of file CHierarchicalMHMap.cpp.
References mrpt::serialization::CArchive::WriteAs().
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 127 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 133 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 154 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 70 of file CSerializable.h.
Friends And Related Function Documentation
◆ CHMHMapArc
|
friend |
Definition at line 32 of file CHierarchicalMHMap.h.
◆ CHMHMapNode
|
friend |
Definition at line 33 of file CHierarchicalMHMap.h.
Member Data Documentation
◆ _init_CHierarchicalMHMap
|
staticprotected |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ className
|
staticconstexpr |
Definition at line 35 of file CHierarchicalMHMap.h.
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ logging_levels_to_colors
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Implementation file for the COutputLogger header class.
Handy for coloring the input based on the verbosity of the message
Definition at line 124 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 129 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ m_arcs
|
protectedinherited |
Definition at line 47 of file CHierarchicalMapMHPartition.h.
◆ m_history
|
mutableprivateinherited |
Definition at line 312 of file system/COutputLogger.h.
◆ m_listCallbacks
|
privateinherited |
Definition at line 314 of file system/COutputLogger.h.
◆ m_logger_name
|
privateinherited |
Definition at line 310 of file system/COutputLogger.h.
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_nodes
|
protectedinherited |
The internal list of nodes and arcs in the whole hierarchical model.
The objects must be deleted only in the CHierarchicalMap class, not in partitions only objects.
Definition at line 46 of file CHierarchicalMapMHPartition.h.
Referenced by mrpt::hmtslam::CHierarchicalMapMHPartition::begin(), and mrpt::hmtslam::CHierarchicalMapMHPartition::end().
◆ runtimeClassId
|
staticprotected |
Definition at line 35 of file CHierarchicalMHMap.h.