#include <mrpt/serialization/CSerializable.h>#include <mrpt/containers/list_searchable.h>#include <set>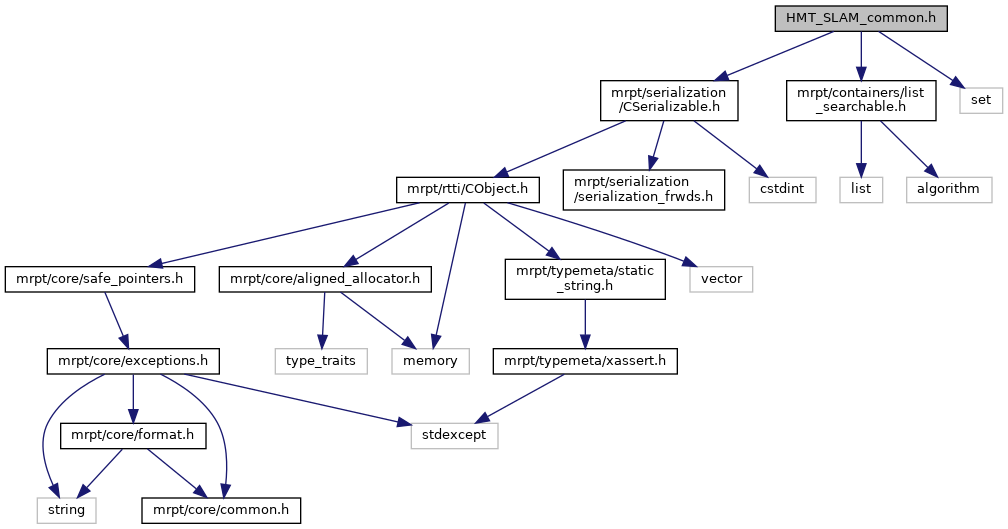

Go to the source code of this file.
Classes | |
| class | mrpt::hmtslam::THypothesisIDSet |
| A set of hypothesis IDs, used for arcs and nodes in multi-hypothesis hybrid maps. More... | |
| class | mrpt::hmtslam::TArcList |
| A class for storing a sequence of arcs (a path). More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hmtslam | |
| Classes related to the implementation of Hybrid Metric Topological (HMT) SLAM. | |
Macros | |
| #define | COMMON_TOPOLOG_HYP static_cast<THypothesisID>(0) |
| #define | NODE_ANNOTATION_METRIC_MAPS "metricMaps" |
| #define | NODE_ANNOTATION_REF_POSEID "refPoseID" |
| #define | NODE_ANNOTATION_POSES_GRAPH "posesGraph" |
| #define | NODE_ANNOTATION_PLACE_POSE "placePose" |
| #define | ARC_ANNOTATION_DELTA "Delta" |
| #define | ARC_ANNOTATION_DELTA_SRC_POSEID "Delta_poseID_src" |
| #define | ARC_ANNOTATION_DELTA_TRG_POSEID "Delta_poseID_trg" |
| #define | ARC_TYPES "Membership,Navegability,RelativePose,Location" |
| Used in constructor of mrpt::hmtslam::CHMHMapArc. More... | |
| #define | DEFAULT_ARC_TYPE "Membership" |
| #define | NODE_TYPES "Place,Area,TopologicalMap,Object" |
| Used in constructor of mrpt::hmtslam::CHMHMapNode. More... | |
| #define | DEFAULT_NODE_TYPE "Place" |
| #define | POSEID_INVALID static_cast<TPoseID>(-1) |
| #define | AREAID_INVALID static_cast<uint64_t>(-1) |
| #define | MSG_SOURCE_LSLAM 1 |
| #define | MSG_SOURCE_AA 2 |
Typedefs | |
| using | mrpt::hmtslam::THypothesisID = int64_t |
| An integer number uniquely identifying each of the concurrent hypotheses for the robot topological path (& possibly local metric clusters) in HMT-SLAM. More... | |
| using | mrpt::hmtslam::TPoseID = uint64_t |
| An integer number uniquely identifying each robot pose stored in HMT-SLAM. More... | |
| using | mrpt::hmtslam::TPairPoseIDs = std::pair< TPoseID, TPoseID > |
| using | mrpt::hmtslam::TPoseIDList = std::vector< TPoseID > |
| using | mrpt::hmtslam::TPoseIDSet = std::set< TPoseID > |
Macro Definition Documentation
◆ ARC_ANNOTATION_DELTA
| #define ARC_ANNOTATION_DELTA "Delta" |
Definition at line 24 of file HMT_SLAM_common.h.
◆ ARC_ANNOTATION_DELTA_SRC_POSEID
| #define ARC_ANNOTATION_DELTA_SRC_POSEID "Delta_poseID_src" |
Definition at line 27 of file HMT_SLAM_common.h.
◆ ARC_ANNOTATION_DELTA_TRG_POSEID
| #define ARC_ANNOTATION_DELTA_TRG_POSEID "Delta_poseID_trg" |
Definition at line 29 of file HMT_SLAM_common.h.
◆ ARC_TYPES
| #define ARC_TYPES "Membership,Navegability,RelativePose,Location" |
Used in constructor of mrpt::hmtslam::CHMHMapArc.
Definition at line 33 of file HMT_SLAM_common.h.
◆ AREAID_INVALID
| #define AREAID_INVALID static_cast<uint64_t>(-1) |
Definition at line 43 of file HMT_SLAM_common.h.
◆ COMMON_TOPOLOG_HYP
| #define COMMON_TOPOLOG_HYP static_cast<THypothesisID>(0) |
Definition at line 16 of file HMT_SLAM_common.h.
◆ DEFAULT_ARC_TYPE
| #define DEFAULT_ARC_TYPE "Membership" |
Definition at line 34 of file HMT_SLAM_common.h.
◆ DEFAULT_NODE_TYPE
| #define DEFAULT_NODE_TYPE "Place" |
Definition at line 38 of file HMT_SLAM_common.h.
◆ MSG_SOURCE_AA
| #define MSG_SOURCE_AA 2 |
Definition at line 46 of file HMT_SLAM_common.h.
◆ MSG_SOURCE_LSLAM
| #define MSG_SOURCE_LSLAM 1 |
Definition at line 45 of file HMT_SLAM_common.h.
◆ NODE_ANNOTATION_METRIC_MAPS
| #define NODE_ANNOTATION_METRIC_MAPS "metricMaps" |
Definition at line 18 of file HMT_SLAM_common.h.
◆ NODE_ANNOTATION_PLACE_POSE
| #define NODE_ANNOTATION_PLACE_POSE "placePose" |
Definition at line 22 of file HMT_SLAM_common.h.
◆ NODE_ANNOTATION_POSES_GRAPH
| #define NODE_ANNOTATION_POSES_GRAPH "posesGraph" |
Definition at line 20 of file HMT_SLAM_common.h.
◆ NODE_ANNOTATION_REF_POSEID
| #define NODE_ANNOTATION_REF_POSEID "refPoseID" |
Definition at line 19 of file HMT_SLAM_common.h.
◆ NODE_TYPES
| #define NODE_TYPES "Place,Area,TopologicalMap,Object" |
Used in constructor of mrpt::hmtslam::CHMHMapNode.
Definition at line 37 of file HMT_SLAM_common.h.
◆ POSEID_INVALID
| #define POSEID_INVALID static_cast<TPoseID>(-1) |
Definition at line 41 of file HMT_SLAM_common.h.