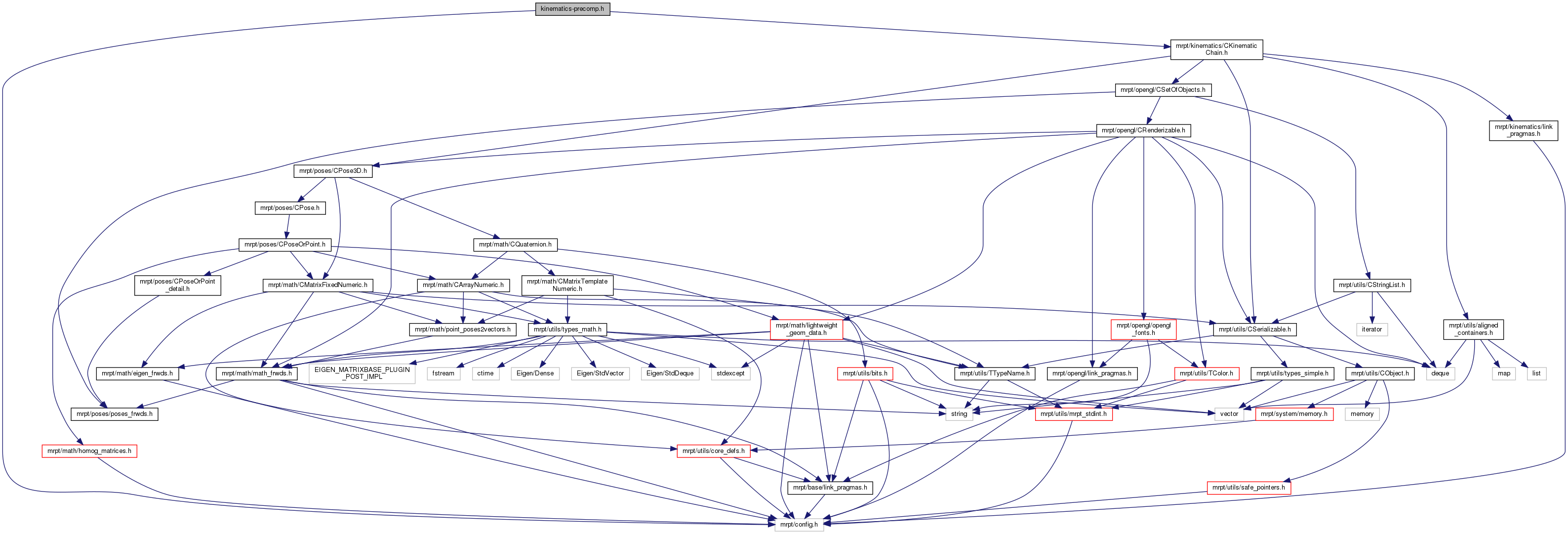
Include dependency graph for kinematics-precomp.h:
This graph shows which files directly or indirectly include this file:

| Page generated by Doxygen 1.8.14 for MRPT 1.5.9 Git: 690a4699f Wed Apr 15 19:29:53 2020 +0200 at mié abr 15 19:30:12 CEST 2020 | |