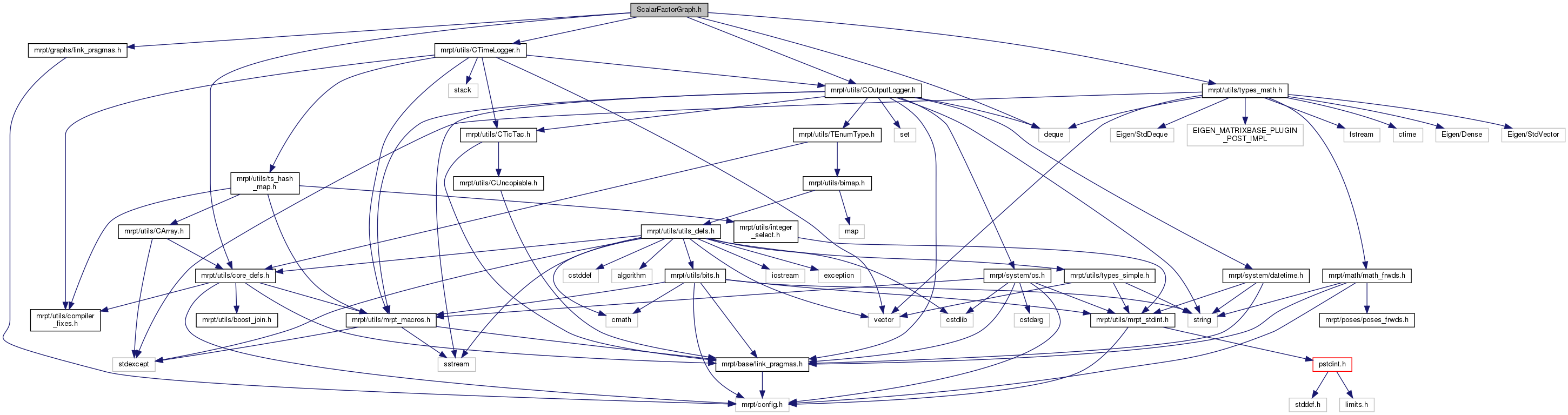
#include <mrpt/utils/core_defs.h>#include <mrpt/utils/types_math.h>#include <mrpt/utils/COutputLogger.h>#include <mrpt/utils/CTimeLogger.h>#include <deque>#include <mrpt/graphs/link_pragmas.h>
Include dependency graph for ScalarFactorGraph.h:
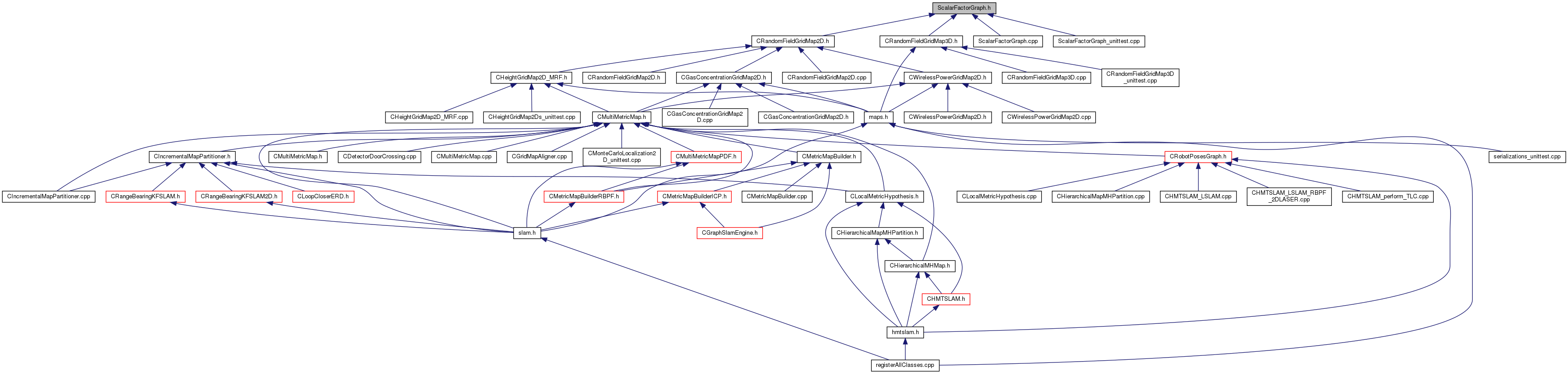
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphs::ScalarFactorGraph |
| Sparse solver for GMRF (Gaussian Markov Random Fields) graphical models. More... | |
| struct | mrpt::graphs::ScalarFactorGraph::FactorBase |
| struct | mrpt::graphs::ScalarFactorGraph::UnaryFactorVirtualBase |
| Simple, scalar (1-dim) constraint (edge) for a GMRF. More... | |
| struct | mrpt::graphs::ScalarFactorGraph::BinaryFactorVirtualBase |
| Simple, scalar (1-dim) constraint (edge) for a GMRF. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |