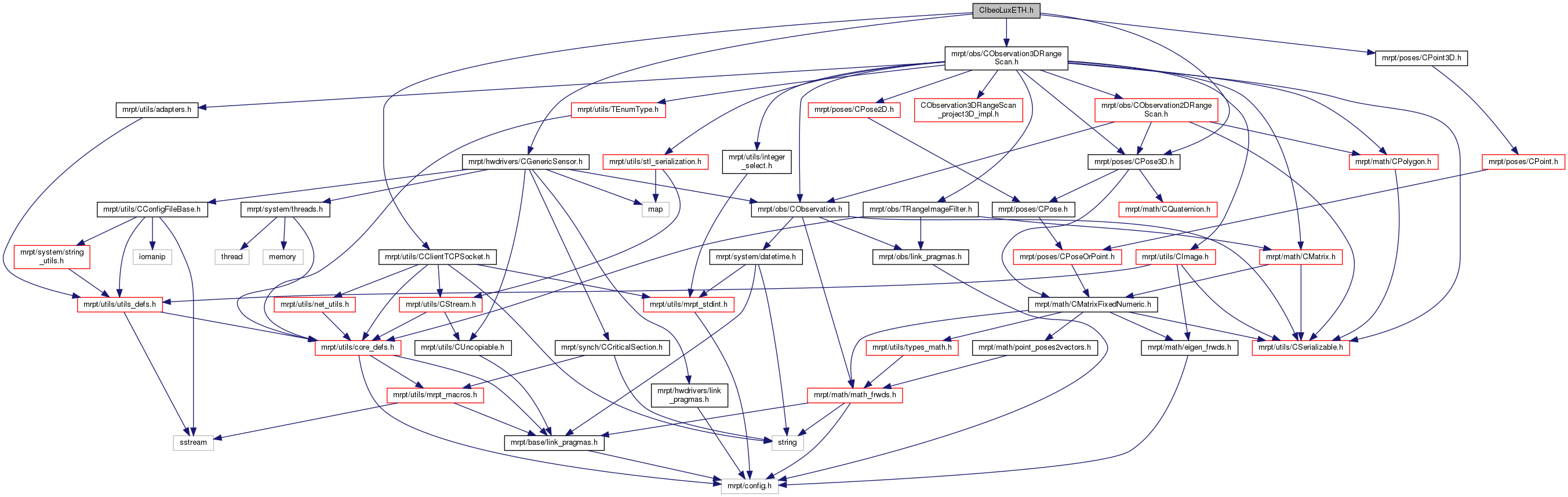
#include <mrpt/hwdrivers/CGenericSensor.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPoint3D.h>#include <mrpt/obs/CObservation3DRangeScan.h>#include <mrpt/utils/CClientTCPSocket.h>
Include dependency graph for CIbeoLuxETH.h:
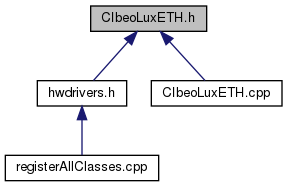
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::hwdrivers::CIbeoLuxETH |
| This "software driver" implements the communication protocol for interfacing a Ibeo Lux laser scanners through an ethernet controller. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hwdrivers | |
| Contains classes for various device interfaces. | |