CVehicleSimulVirtualBase.h File Reference
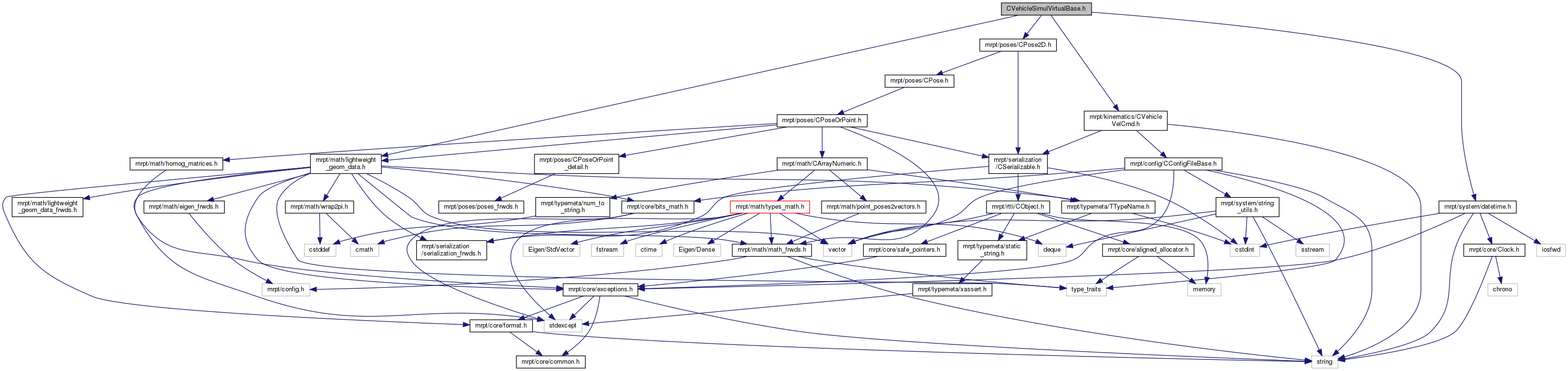
#include <mrpt/poses/CPose2D.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/system/datetime.h>#include <mrpt/kinematics/CVehicleVelCmd.h>
Include dependency graph for CVehicleSimulVirtualBase.h:
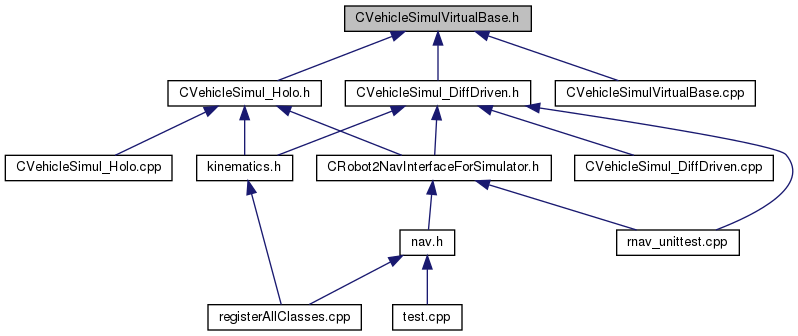
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::kinematics::CVehicleSimulVirtualBase |
| This class can be used to simulate the kinematics and dynamics of a differential driven planar mobile robot, including odometry errors and dynamics limitations. More... | |
Namespaces | |
| mrpt::kinematics | |