Example: gui_fbo_render_example
See: Tutorial: 3D scenes
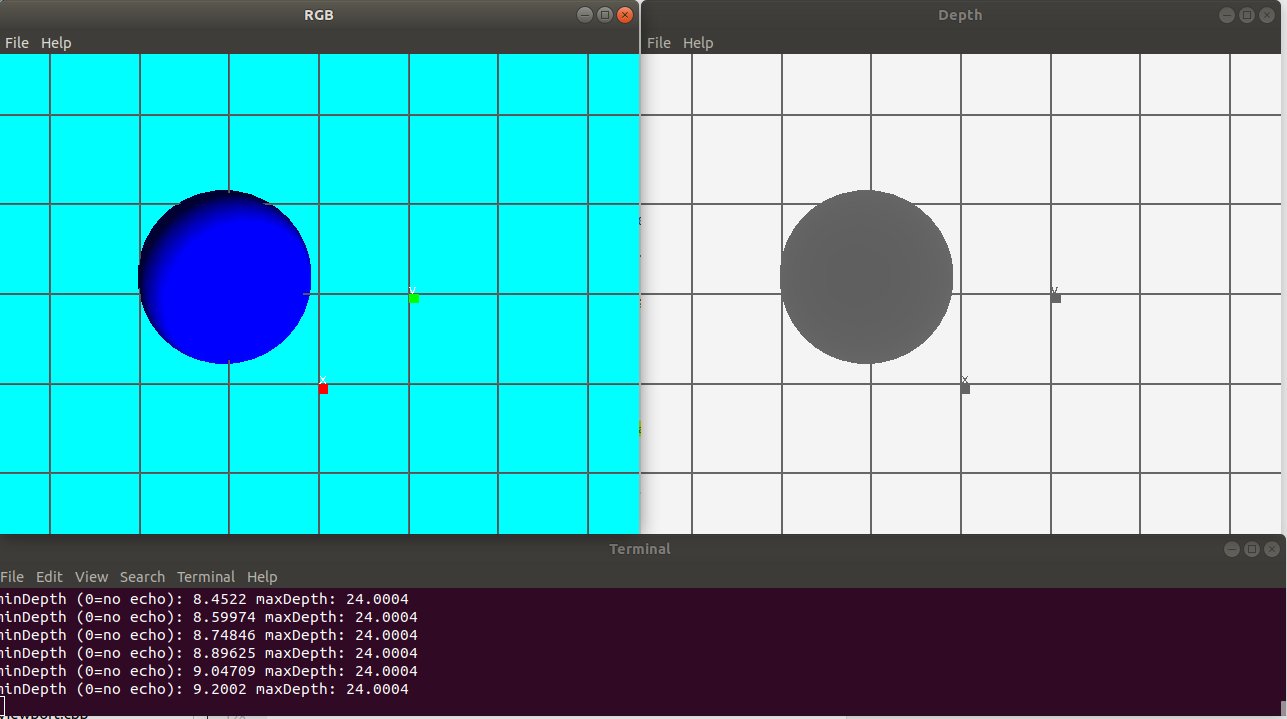
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2024, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/gui/CDisplayWindow.h> #include <mrpt/img/CImage.h> #include <mrpt/opengl/CAxis.h> #include <mrpt/opengl/CBox.h> #include <mrpt/opengl/CFBORender.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/opengl/CSphere.h> #include <mrpt/opengl/Scene.h> #include <mrpt/system/CTimeLogger.h> #include <chrono> #include <iostream> #include <thread> using namespace mrpt::literals; // _deg using namespace mrpt::gui; using namespace mrpt::opengl; using namespace mrpt::img; using namespace std::literals; // ------------------------------------------------------ // TestDisplay3D // ------------------------------------------------------ void TestDisplay3D() { Scene scene; // Modify the scene: // ------------------------------------------------------ { auto obj = mrpt::opengl::CGridPlaneXY::Create(-20, 20, -20, 20, 0, 1); obj->setColor(0.4f, 0.4f, 0.4f); scene.insert(obj); } { auto obj = mrpt::opengl::CBox::Create( mrpt::math::TPoint3D(0, 0, 0), mrpt::math::TPoint3D(.1, .1, .1)); obj->setColor(1.0f, 0.f, 0.f); obj->setName("x"); obj->enableShowName(true); obj->setLocation(1.0, 0, 0); scene.insert(obj); } { auto obj = mrpt::opengl::CBox::Create( mrpt::math::TPoint3D(0, 0, 0), mrpt::math::TPoint3D(.1, .1, .1)); obj->setColor(0.0f, 1.f, 0.f); obj->setName("y"); obj->enableShowName(true); obj->setLocation(0, 1.0, 0); scene.insert(obj); } { auto obj = mrpt::opengl::CTexturedPlane::Create(); obj->setPlaneCorners(-10, 10, -10, 10); obj->setColor_u8(0x00, 0xff, 0xff, 0xff); obj->setLocation(0, 0, -14); scene.insert(obj); } { auto obj = mrpt::opengl::CSphere::Create(); obj->setColor(0, 0, 1); obj->setRadius(1.0f); obj->setLocation(0, 1, 0); obj->setName("ball_1"); scene.insert(obj); } { auto obj = mrpt::opengl::CSphere::Create(); obj->setColor(1, 0, 0); obj->setRadius(2.f); obj->setLocation(-3, -1, 1); obj->setName("ball_2"); scene.insert(obj); } CDisplayWindow win("RGB"), winDepth("Depth"); mrpt::system::CTimeLogger tl; int width = 500, height = 400; const double cameraFOVdeg = 90.0; mrpt::opengl::CFBORender renderer(width, height); CImage frame(width, height, CH_RGB); mrpt::math::CMatrixFloat depth; scene.getViewport()->setCustomBackgroundColor({0.3f, 0.3f, 0.3f, 1.0f}); const float clipMax = 25.0f; scene.getViewport()->setViewportClipDistances(0.1, clipMax); { CCamera& camera = renderer.getCamera(scene); #if 0 mrpt::img::TCamera c1; c1.ncols = width; c1.nrows = height; c1.fx(width * 0.5); c1.fy(width * 0.5); c1.cx(width / 2); c1.cy(height / 2); camera.setProjectiveFromPinhole(c1); #else camera.setProjectiveFOVdeg(cameraFOVdeg); #endif #if 0 // Define camera by orbit camera.setZoomDistance(10); camera.setAzimuthDegrees(0); camera.setElevationDegrees(90); #else // Defined by setPose() instead of orbit values: camera.set6DOFMode(true); // Reference camera pose: auto robotPose = mrpt::poses::CPose3D( 0, 0, 10.0, 0.0_deg /*yaw*/, 90.0_deg /*pitch*/, 0.0_deg /*roll*/); // Convert to +Z pointing forward camera axes: auto camPose = robotPose + mrpt::poses::CPose3D::FromYawPitchRoll( 90.0_deg /*yaw*/, 0.0_deg /*pitch*/, 90.0_deg /*roll*/); // std::cout << "Camera SE(3) HM:\n" << // camPose.getHomogeneousMatrixVal<mrpt::math::CMatrixDouble44>() << // "\n"; camera.setPose(camPose); #endif } while (win.isOpen()) { CRenderizable::Ptr obj = scene.getByName("ball_1"); const double t = mrpt::Clock::nowDouble(); obj->setLocation( 1 + cos(t + 0.2) * 2, -2 + sin(t + 0.9) * 4, sin(t + 1.2) * 5); obj = scene.getByName("ball_2"); const auto p1 = obj->getPose(); obj->setLocation( p1.x + cos(p1.y / 2) * 0.01, p1.y - sin(p1.x / 2) * 0.09, p1.z - sin(p1.x / 2) * 0.08); tl.enter("render_RGBD"); renderer.render_RGBD(scene, frame, depth); tl.leave("render_RGBD"); // show the rendered RGB image win.showImage(frame); // Show depth: if (!depth.empty()) { std::cout << "minDepth (0=no echo): " << depth.minCoeff() << " maxDepth: " << depth.maxCoeff() << std::endl; mrpt::img::CImage imDepth; depth *= (1.0f / clipMax); imDepth.setFromMatrix(depth, true); winDepth.showImage(imDepth); } std::this_thread::sleep_for(25ms); } } // ------------------------------------------------------ // MAIN // ------------------------------------------------------ int main(int argc, char* argv[]) { try { TestDisplay3D(); return 0; } catch (const std::exception& e) { std::cerr << "MRPT error: " << mrpt::exception_to_str(e) << std::endl; return -1; } }