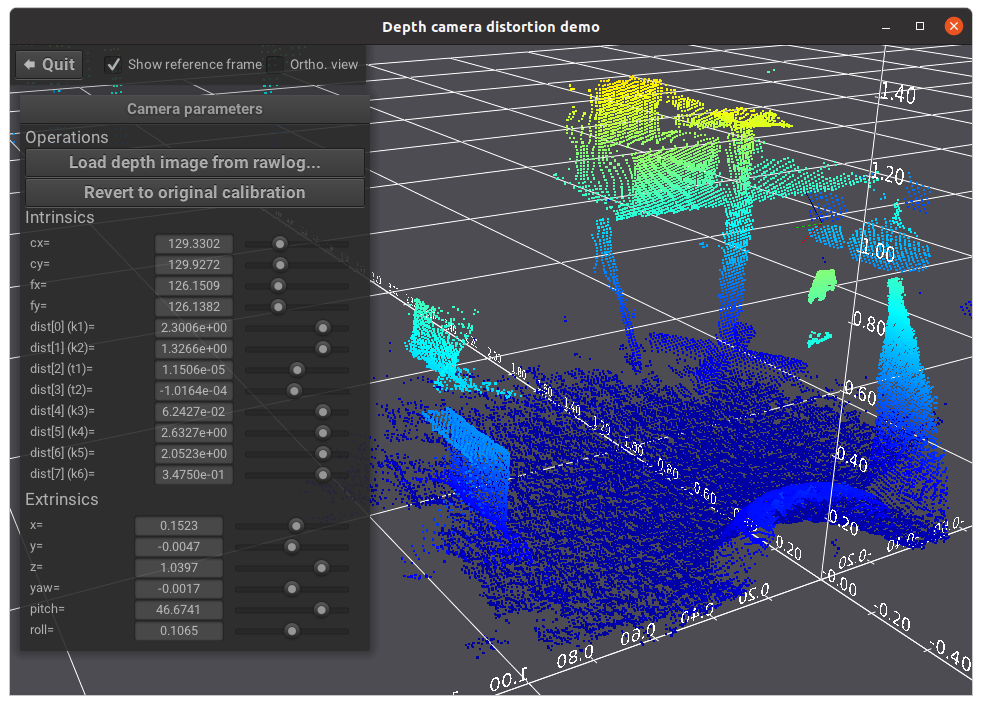
Example: gui_depth_camera_distortion
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2022, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #ifdef __EMSCRIPTEN__ // are we actually in a Wasm JS instance? #include <emscripten.h> #include <emscripten/html5.h> #define GL_GLEXT_PROTOTYPES #define EGL_EGLEXT_PROTOTYPES #include <GLFW/glfw3.h> #include <functional> std::function<void()> loop; void main_loop() { loop(); } #endif #include <mrpt/core/exceptions.h> #include <mrpt/core/lock_helper.h> #include <mrpt/gui/CDisplayWindowGUI.h> #include <mrpt/io/lazy_load_path.h> #include <mrpt/obs/CObservation3DRangeScan.h> #include <mrpt/obs/CRawlog.h> #include <mrpt/opengl/CAxis.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/opengl/CPointCloudColoured.h> #include <mrpt/opengl/stock_objects.h> #include <iostream> #if MRPT_HAS_NANOGUI constexpr int SMALL_FONT_SIZE = 15; constexpr int LARGE_FONT_SIZE = 20; // We need to define all variables here to avoid emscripten memory errors // if they are defined as *locals* in the function. struct AppData { AppData() = default; mrpt::gui::CDisplayWindowGUI::Ptr win; mrpt::opengl::CAxis::Ptr gl_corner_reference; mrpt::obs::CObservation3DRangeScan::Ptr obs; mrpt::img::TCamera originalCalib; mrpt::poses::CPose3D originalSensorPose; mrpt::opengl::CPointCloudColoured::Ptr gl_pts; mrpt::opengl::CSetOfObjects::Ptr gl_sensorPoseCorner; std::vector<nanogui::TextBox*> edBoxes /* cx,cy,... dist[7]*/ , edBoxesExtrinsics /*x,y,... pitch, roll*/; std::vector<nanogui::Slider*> sliders /* cx,cy,... dist[7] */, slidersExtrinsics /*x,y,... pitch, roll*/; nanogui::ComboBox* cbDistType; void obs_params_to_gui(); void gui_params_to_obs(); }; static AppData app; // The main function: update all graphs static void recalcAll() { auto lck = mrpt::lockHelper(app.win->background_scene_mtx); if (!app.obs || !app.obs->hasRangeImage) { app.gl_pts->clear(); return; } mrpt::obs::T3DPointsProjectionParams pp; pp.takeIntoAccountSensorPoseOnRobot = true; app.obs->unprojectInto(*app.gl_pts, pp); const auto bbox = app.gl_pts->getBoundingBox(); app.gl_pts->recolorizeByCoordinate( bbox.min.z, bbox.max.z, 2 /*0,1,2=x,y,z*/); app.gl_pts->setPointSize(2.0f); app.gl_sensorPoseCorner->setPose(app.obs->sensorPose); }; void AppData::obs_params_to_gui() { ASSERT_(obs); ASSERT_EQUAL_(edBoxes.size(), sliders.size()); ASSERT_EQUAL_(edBoxes.size(), 12U); const auto& p = obs->cameraParams; edBoxes[0]->setValue(mrpt::format("%.04f", p.cx())); edBoxes[1]->setValue(mrpt::format("%.04f", p.cy())); edBoxes[2]->setValue(mrpt::format("%.04f", p.fx())); edBoxes[3]->setValue(mrpt::format("%.04f", p.fy())); cbDistType->setSelectedIndex(static_cast<int>(p.distortion)); for (int i = 0; i < 8; i++) edBoxes[4 + i]->setValue(mrpt::format("%.04e", p.dist[i])); // slider ranges: const double maxPixelRanges = std::max(std::max(p.cx(), p.cy()), std::max(p.fx(), p.fy())); const double minPixelRanges = std::min(std::min(p.cx(), p.cy()), std::min(p.fx(), p.fy())); for (int i = 0; i < 4; i++) { sliders[i]->setRange({0.75 * minPixelRanges, 1.5 * maxPixelRanges}); } for (int i = 4; i < 12; i++) { const double absVal = std::max(1e-3, std::abs(std::stod(edBoxes[i]->value()))); sliders[i]->setRange({-2.0 * absVal, 2.0 * absVal}); } // slider values: for (size_t i = 0; i < edBoxes.size(); i++) sliders[i]->setValue(std::stod(edBoxes[i]->value())); // Extrinsics ranges: for (int i = 0; i < 3; i++) slidersExtrinsics[i]->setRange({-2.0, 2.0}); slidersExtrinsics[3]->setRange({-180.0, 180.0}); slidersExtrinsics[4]->setRange({-90.0, 90.0}); slidersExtrinsics[5]->setRange({-180.0, 180.0}); // Extrinsics values: for (int i = 0; i < 6; i++) { double val = obs->sensorPose[i]; if (i > 3) val = mrpt::RAD2DEG(val); edBoxesExtrinsics[i]->setValue(mrpt::format("%.04f", val)); slidersExtrinsics[i]->setValue(val); } } void AppData::gui_params_to_obs() { ASSERT_(obs); ASSERT_EQUAL_(edBoxes.size(), sliders.size()); ASSERT_EQUAL_(edBoxes.size(), 12U); auto& p = obs->cameraParams; p.distortion = mrpt::img::DistortionModel::plumb_bob; p.cx(std::stod(edBoxes[0]->value())); p.cy(std::stod(edBoxes[1]->value())); p.fx(std::stod(edBoxes[2]->value())); p.fy(std::stod(edBoxes[3]->value())); for (int i = 0; i < 8; i++) p.dist.at(i) = std::stod(edBoxes[4 + i]->value()); p.distortion = mrpt::typemeta::str2enum<mrpt::img::DistortionModel>( cbDistType->items().at((cbDistType->selectedIndex()))); // Extrinsics: app.obs->sensorPose = mrpt::poses::CPose3D::FromXYZYawPitchRoll( std::stod(edBoxesExtrinsics[0]->value()), // x std::stod(edBoxesExtrinsics[1]->value()), // y std::stod(edBoxesExtrinsics[2]->value()), // z mrpt::DEG2RAD(std::stod(edBoxesExtrinsics[3]->value())), // yaw mrpt::DEG2RAD(std::stod(edBoxesExtrinsics[4]->value())), // pitch mrpt::DEG2RAD(std::stod(edBoxesExtrinsics[5]->value())) // roll ); } static void AppDepthCamDemo() { nanogui::init(); // Create main window: mrpt::gui::CDisplayWindowGUI_Params cp; // cp.fullscreen = true; // Init values: app.gl_corner_reference = mrpt::opengl::CAxis::Create( -5.0f, -5.0f, .0f, 5.0f, 5.0f, 2.0f, 0.2f, 1.0f, true); app.gl_corner_reference->setTextScale(0.04); app.gl_pts = mrpt::opengl::CPointCloudColoured::Create(); app.gl_sensorPoseCorner = mrpt::opengl::stock_objects::CornerXYZSimple(0.10f); // Create GUI: app.win = mrpt::gui::CDisplayWindowGUI::Create( "Depth camera distortion demo", 1000, 700, cp); // Add main window: // ----------------------------- nanogui::Window* w = new nanogui::Window(&(*app.win), "Camera parameters"); w->setPosition(nanogui::Vector2i(10, 50)); w->setLayout(new nanogui::GridLayout( nanogui::Orientation::Horizontal, 1, nanogui::Alignment::Fill, 5, 0)); w->setFixedWidth(350); // Load button: w->add<nanogui::Label>("Operations")->setFontSize(LARGE_FONT_SIZE); w->add<nanogui::Button>("Load depth image from rawlog...") ->setCallback([]() { try { const std::string loadFile = nanogui::file_dialog( {{"rawlog", "MRPT rawlog dataset files"}, {"*", "Any file"}}, false); if (loadFile.empty()) return; // Enable MRPT to find externalized rawlogs: mrpt::io::setLazyLoadPathBase( mrpt::obs::CRawlog::detectImagesDirectory(loadFile)); mrpt::obs::CRawlog rawlog; if (!rawlog.loadFromRawLogFile(loadFile)) return; ASSERT_(!rawlog.empty()); mrpt::obs::CObservation3DRangeScan::Ptr obs; // Obs-only format: if (rawlog.getType(0) == mrpt::obs::CRawlog::etObservation) { obs = std::dynamic_pointer_cast< mrpt::obs::CObservation3DRangeScan>( rawlog.getAsObservation(0)); ASSERTMSG_( obs, "First observation in rawlog is not " "CObservation3DRangeScan"); } else { // SF format: ASSERT_( rawlog.getType(0) == mrpt::obs::CRawlog::etSensoryFrame); obs = rawlog.getAsObservations(0) ->getObservationByClass< mrpt::obs::CObservation3DRangeScan>(); ASSERT_(obs); } app.obs = obs; app.originalCalib = obs->cameraParams; app.originalSensorPose = obs->sensorPose; app.obs_params_to_gui(); recalcAll(); } catch (const std::exception& e) { std::cerr << e.what() << std::endl; // auto dlg = new nanogui::MessageDialog( app.win->screen(), nanogui::MessageDialog::Type::Warning, "Exception", e.what()); } }); w->add<nanogui::Button>("Revert to original calibration") ->setCallback([]() { if (!app.obs) return; app.obs->cameraParams = app.originalCalib; app.obs->sensorPose = app.originalSensorPose; app.obs_params_to_gui(); recalcAll(); }); // Sliders and value controls: w->add<nanogui::Label>("Intrinsics")->setFontSize(LARGE_FONT_SIZE); ; { auto pn = w->add<nanogui::Widget>(); pn->setLayout(new nanogui::GridLayout( nanogui::Orientation::Horizontal, 3, nanogui::Alignment::Fill, 5, 0)); pn->add<nanogui::Label>("Distortion model"); app.cbDistType = pn->add<nanogui::ComboBox>( std::vector<std::string>({"none", "plumb_bob", "kannala_brandt"})); pn->add<nanogui::Label>(" "); app.cbDistType->setCallback([](int) { app.gui_params_to_obs(); recalcAll(); }); std::vector<std::string> lb = { "cx=", "cy=", "fx=", "fy=", "dist[0] (k1)=", "dist[1] (k2)=", "dist[2] (t1)=", "dist[3] (t2)=", "dist[4] (k3)=", "dist[5] (k4)=", "dist[6] (k5)=", "dist[7] (k6)=", }; for (size_t i = 0; i < lb.size(); i++) { pn->add<nanogui::Label>(lb[i])->setFontSize(SMALL_FONT_SIZE); nanogui::TextBox* ed = pn->add<nanogui::TextBox>(" "); app.edBoxes.push_back(ed); ed->setEditable(true); ed->setFormat("[-+]?[0-9.e+-]*"); ed->setCallback([](const std::string&) { app.gui_params_to_obs(); recalcAll(); return true; }); nanogui::Slider* sl = pn->add<nanogui::Slider>(); app.sliders.push_back(sl); sl->setRange({-1.0f, 1.0f}); sl->setCallback([&, ed](float val) { ed->setValue(mrpt::format("%.03g", val)); ed->callback()(ed->value()); }); ed->setFontSize(SMALL_FONT_SIZE); } } // Extrinsics: w->add<nanogui::Label>("Extrinsics")->setFontSize(LARGE_FONT_SIZE); { auto pn = w->add<nanogui::Widget>(); pn->setLayout(new nanogui::GridLayout( nanogui::Orientation::Horizontal, 3, nanogui::Alignment::Fill, 5, 0)); std::vector<std::string> lb = { "x=", "y=", "z=", "yaw=", "pitch=", "roll="}; for (size_t i = 0; i < lb.size(); i++) { pn->add<nanogui::Label>(lb[i])->setFontSize(SMALL_FONT_SIZE); nanogui::TextBox* ed = pn->add<nanogui::TextBox>(" "); app.edBoxesExtrinsics.push_back(ed); ed->setEditable(true); ed->setFormat("[-+]?[0-9.e+-]*"); ed->setCallback([](const std::string&) { app.gui_params_to_obs(); recalcAll(); return true; }); ed->setFontSize(SMALL_FONT_SIZE); nanogui::Slider* sl = pn->add<nanogui::Slider>(); app.slidersExtrinsics.push_back(sl); sl->setRange({-1.0f, 1.0f}); sl->setCallback([&, ed](float val) { ed->setValue(mrpt::format("%.03g", val)); ed->callback()(ed->value()); }); } } // Add top menu subwindow: // ----------------------------- { nanogui::ref<nanogui::Window> winMenu = new nanogui::Window(&(*app.win), ""); winMenu->setPosition(nanogui::Vector2i(0, 0)); winMenu->setLayout(new nanogui::BoxLayout( nanogui::Orientation::Horizontal, nanogui::Alignment::Middle, 5)); nanogui::Theme* modTheme = new nanogui::Theme(app.win->screen()->nvgContext()); modTheme->mWindowHeaderHeight = 1; winMenu->setTheme(modTheme); #ifndef __EMSCRIPTEN__ // are we actually in a Wasm JS instance? winMenu->add<nanogui::Button>("Quit", ENTYPO_ICON_ARROW_BOLD_LEFT) ->setCallback([]() { app.win->setVisible(false); }); #endif winMenu->add<nanogui::Label>(" "); // separator winMenu ->add<nanogui::CheckBox>( "Show reference frame", [&](bool b) { app.gl_corner_reference->setVisibility(b); }) ->setChecked(true); winMenu ->add<nanogui::CheckBox>( "Ortho. view", [&](bool b) { app.win->camera().setCameraProjective(!b); }) ->setChecked(false); } // Add a background scene: // ----------------------------- { auto scene = mrpt::opengl::COpenGLScene::Create(); scene->insert(mrpt::opengl::CGridPlaneXY::Create()); scene->insert(app.gl_corner_reference); scene->insert(app.gl_pts); scene->insert(app.gl_sensorPoseCorner); auto lck = mrpt::lockHelper(app.win->background_scene_mtx); app.win->background_scene = std::move(scene); } app.win->performLayout(); app.win->camera().setZoomDistance(7.0f); // Update view and process events: app.win->drawAll(); app.win->setVisible(true); #if !defined(__EMSCRIPTEN__) // are we in a Wasm JS instance? // No: regular procedure: nanogui::mainloop(); nanogui::shutdown(); #else // Yes, we are in a web browser running on JS: loop = [] { // Check if any events have been activated (key pressed, mouse moved // etc.) and call corresponding response functions glfwPollEvents(); glClearColor(0.2f, 0.25f, 0.3f, 1.0f); glClear(GL_COLOR_BUFFER_BIT); // Draw nanogui app.win->drawContents(); app.win->drawWidgets(); glfwSwapBuffers(app.win->glfwWindow()); }; emscripten_set_main_loop(main_loop, 0, true); glfwDestroyWindow(app.win->nanogui_screen()->glfwWindow()); // Terminate GLFW, clearing any resources allocated by GLFW. glfwTerminate(); #endif } #endif // MRPT_HAS_NANOGUI int main() { try { #if MRPT_HAS_NANOGUI AppDepthCamDemo(); #else std::cerr << "This example requires MRPT built with NANOGUI.\n"; #endif return 0; } catch (const std::exception& e) { std::cerr << mrpt::exception_to_str(e) << std::endl; return -1; } }