class mrpt::system::CControlledRateTimer
Overview
A class for calling sleep() in a loop, such that the amount of sleep time will be computed to make the loop run at the desired rate (in Hz).
This class implements a PI controller on top of a vanilla CRateTimer object, ensuring a high accuracy in achieved execution rates. Note that this is done by setting a slightly-higher rate (“control action”) to the internal CRateTimer, such that the error between the user-provided expected rate and the actual measured rate (low-pass filtered) is decreased by means of a PI controller.
Note that rates higher than a few kHz are not attainable in all CPUs and/or kernel versions. Find below some graphs illustrating how this class tries to achieve a constant setpoint rate (given by the user), reacting to changes in the setpoint values:
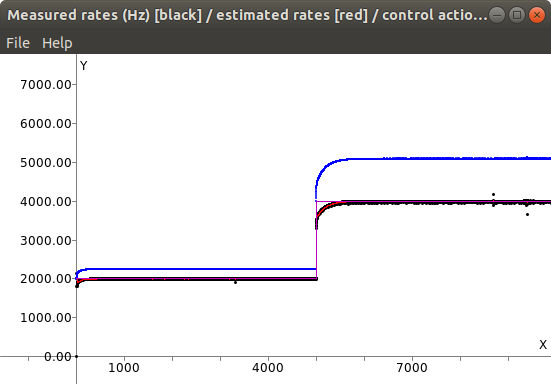
This graphs is generated with the example:
system_control_rate_timer_example --rate1 2000.0 --rate2 4000.0
All the parameters for the PI controller and low-pass filter (rate estimator) are settable by the user to adapt them to specific needs.
Control law by Francisco Jose Mañas Alvarez
[New in MRPT 2.0.4]
#include <mrpt/system/CControlledRateTimer.h> class CControlledRateTimer: public mrpt::system::COutputLogger { public: // construction CControlledRateTimer(const double rate_hz = 1.0); // methods void setRate(const double rate_hz); bool sleep(); double controllerParam_Kp() const; void controllerParam_Kp(double v); double controllerParam_Ti() const; void controllerParam_Ti(double v); double lowPassParam_a0() const; void lowPassParam_a0(double v); double followErrorRatioToRaiseWarning() const; void followErrorRatioToRaiseWarning(double v); double actualControlledRate() const; double estimatedRate() const; double estimatedRateRaw() const; };
Inherited Members
public: // structs struct TMsg;
Construction
CControlledRateTimer(const double rate_hz = 1.0)
Ctor: specifies the desired rate (Hz)
Methods
void setRate(const double rate_hz)
Changes the object loop rate (Hz)
bool sleep()
Sleeps for some time, such as the return of this method is 1/rate (seconds) after the return of the previous call.
Returns:
false if the rate could not be achieved (“we are already late”), true if all went right.
double controllerParam_Kp() const
PI controller Kp parameter [default=1.0].
double controllerParam_Ti() const
PI controller Ti parameter [default=0.0194].
double lowPassParam_a0() const
Low-pass filter a0 value [default=0.9]: estimation = a0*input + (1-a0)*former_estimation.
double followErrorRatioToRaiseWarning() const
Get/set ratio threshold for issuing a warning (via COutputLogger interface) if the achieved rate is not this close to the set-point [Default=0.2, =20%].
double actualControlledRate() const
Gets the actual controller output: the rate (Hz) of the internal CRateTimer object.
double estimatedRate() const
Gets the latest estimated run rate (Hz), which comes from actual period measurement, low-pass filtered.
double estimatedRateRaw() const
Last actual execution rate measured (Hz), without low-pass filtering.