Example: poses_sog_merge_example
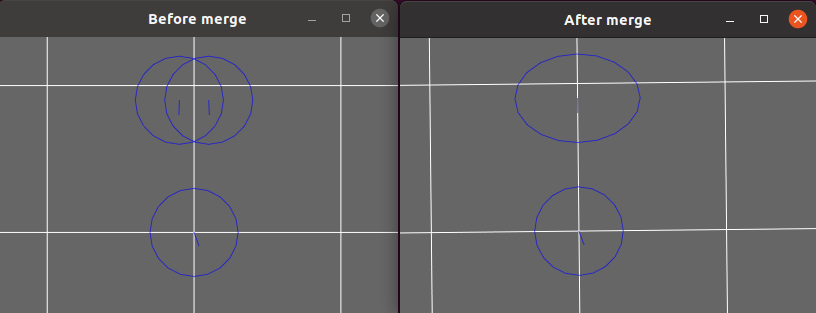
Example of how to merge overlapping modes of a Sum Of Gaussians (SOG) representation of a pose, in this case, a SE(2) SoG probability distribution function.
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2023, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/io/CFileGZOutputStream.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/poses/CPosePDFSOG.h> #include <mrpt/serialization/CArchive.h> #include <mrpt/system/os.h> #include <iostream> using namespace mrpt; using namespace mrpt::poses; using namespace mrpt::opengl; using namespace mrpt::gui; using namespace mrpt::io; using namespace mrpt::system; using namespace mrpt::serialization; using namespace std; /* ------------------------------------------------------------------------ Test_SoG_Merge ------------------------------------------------------------------------ */ void Test_SoG_Merge() { CPosePDFSOG pdf; CPosePDFSOG::TGaussianMode m; m.mean = CPose2D(1.1, -0.1, -2.0_deg); m.cov.setIdentity(); m.cov(0, 0) = m.cov(1, 1) = square(0.1); m.cov(2, 2) = square(2.0_deg); m.log_w = 0; pdf.clear(); pdf.push_back(m); m.mean = CPose2D(1.1, 0.1, 2.0_deg); pdf.push_back(m); m.mean = CPose2D(2, 0, 20.0_deg); pdf.push_back(m); cout << "Initial PDF: mean: " << pdf.getMeanVal() << endl; cout << pdf.getCovariance() << endl << endl; #if MRPT_HAS_WXWIDGETS CDisplayWindow3D win_before("Before merge"); CDisplayWindow3D win_after("After merge"); #endif { Scene scene; CSetOfObjects::Ptr o = CSetOfObjects::Create(); pdf.getAs3DObject(o); scene.insert(o); scene.insert(CGridPlaneXY::Create(-5, 5, -5, 5, 0, 1)); CFileGZOutputStream f("sog_before.3Dscene"); archiveFrom(f) << scene; #if MRPT_HAS_WXWIDGETS Scene::Ptr sc = win_before.get3DSceneAndLock(); *sc = scene; win_before.unlockAccess3DScene(); win_before.setCameraZoom(5); win_before.setCameraPointingToPoint(1, 0, 0); win_before.forceRepaint(); #endif } cout << "Merging..."; pdf.mergeModes(0.9, true); cout << " # modes after: " << pdf.size() << endl; cout << "Final PDF: mean: " << pdf.getMeanVal() << endl; cout << pdf.getCovariance() << endl << endl; { Scene scene; CSetOfObjects::Ptr o = CSetOfObjects::Create(); pdf.getAs3DObject(o); scene.insert(o); scene.insert(CGridPlaneXY::Create(-5, 5, -5, 5, 0, 1)); CFileGZOutputStream f("sog_after.3Dscene"); archiveFrom(f) << scene; #if MRPT_HAS_WXWIDGETS Scene::Ptr sc = win_after.get3DSceneAndLock(); *sc = scene; win_after.unlockAccess3DScene(); win_after.setCameraZoom(5); win_after.setCameraPointingToPoint(1, 0, 0); win_after.forceRepaint(); #endif } #if MRPT_HAS_WXWIDGETS cout << "Push any key to exit..." << endl; mrpt::system::os::getch(); #endif } // ------------------------------------------------------ // MAIN // ------------------------------------------------------ int main(int argc, char** argv) { try { Test_SoG_Merge(); return 0; } catch (const std::exception& e) { std::cerr << "MRPT error: " << mrpt::exception_to_str(e) << std::endl; return -1; } catch (...) { printf("Untyped exception!"); return -1; } }