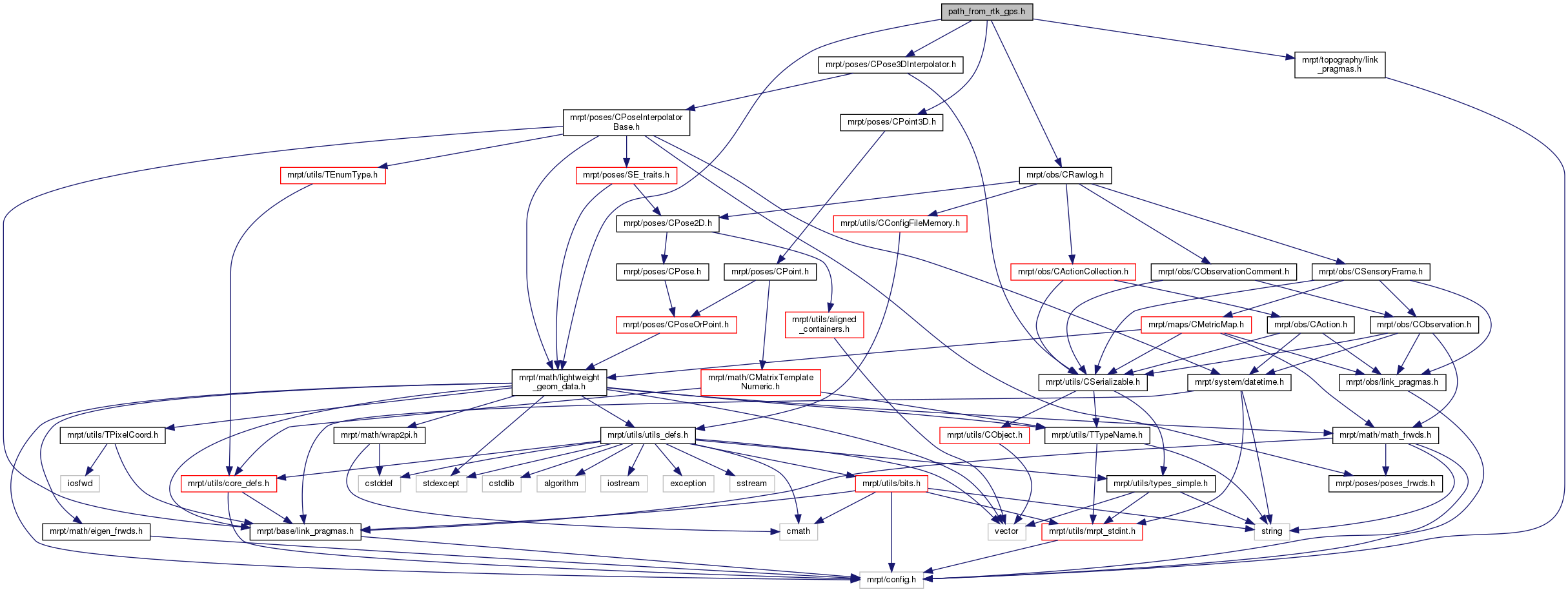
#include <mrpt/poses/CPose3DInterpolator.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/poses/CPoint3D.h>#include <mrpt/obs/CRawlog.h>#include <mrpt/topography/link_pragmas.h>
Include dependency graph for path_from_rtk_gps.h:
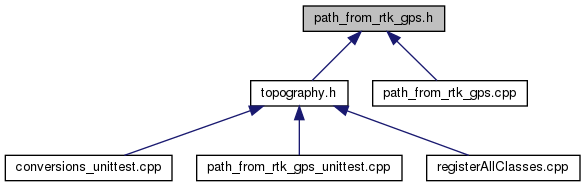
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::topography::TPathFromRTKInfo |
| Used to return optional information from mrpt::topography::path_from_rtk_gps. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::topography | |
| This namespace provides topography helper functions, coordinate transformations. | |
Functions | |
| void TOPO_IMPEXP | mrpt::topography::path_from_rtk_gps (mrpt::poses::CPose3DInterpolator &robot_path, const mrpt::obs::CRawlog &rawlog, size_t rawlog_first, size_t rawlog_last, bool isGUI=false, bool disableGPSInterp=false, int path_smooth_filter_size=2, TPathFromRTKInfo *outInfo=NULL) |
| Reconstruct the path of a vehicle equipped with 3 RTK GPSs. More... | |