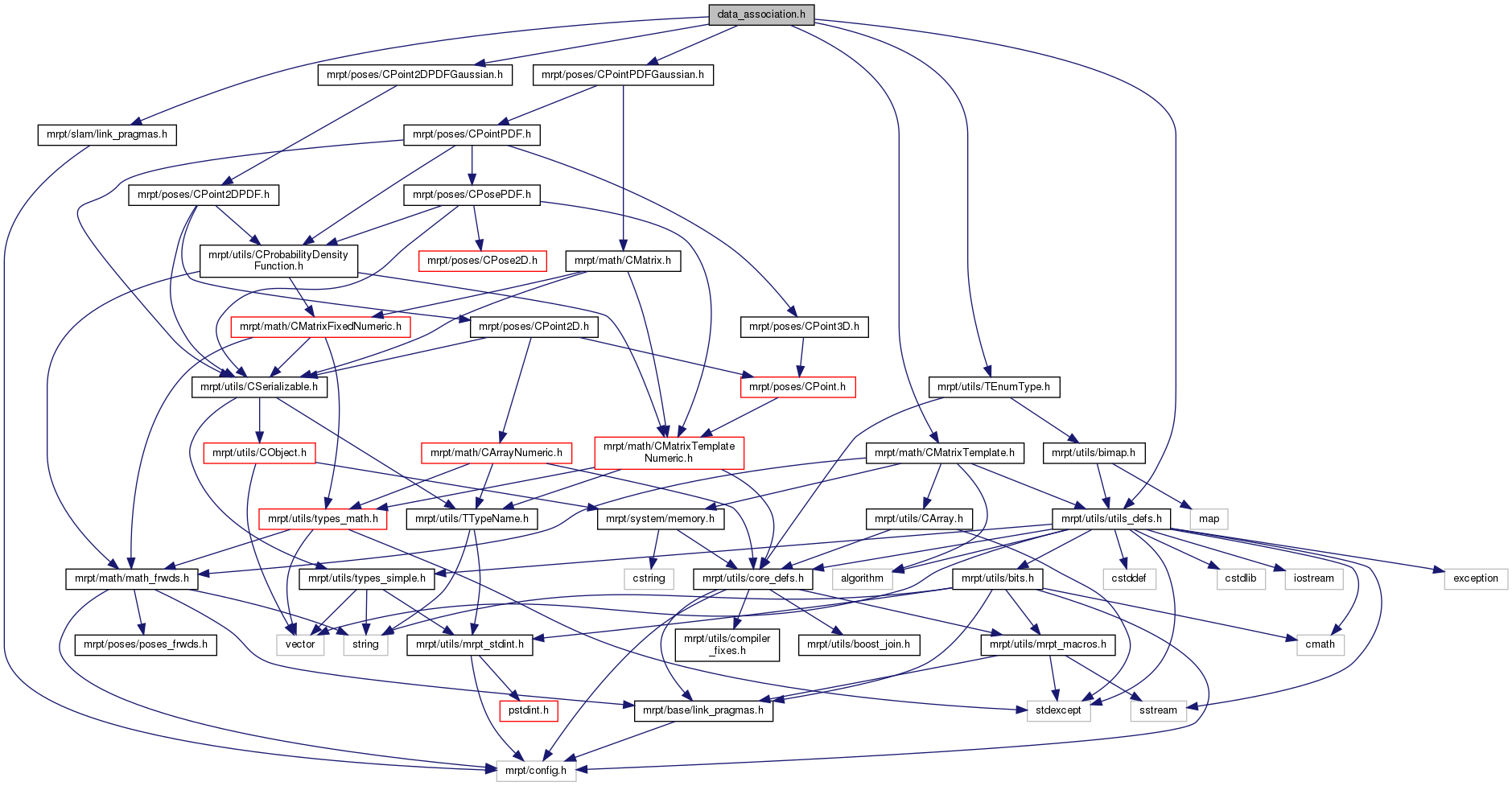
#include <mrpt/utils/utils_defs.h>#include <mrpt/poses/CPoint2DPDFGaussian.h>#include <mrpt/poses/CPointPDFGaussian.h>#include <mrpt/math/CMatrixTemplate.h>#include <mrpt/utils/TEnumType.h>#include <mrpt/slam/link_pragmas.h>
Include dependency graph for data_association.h:
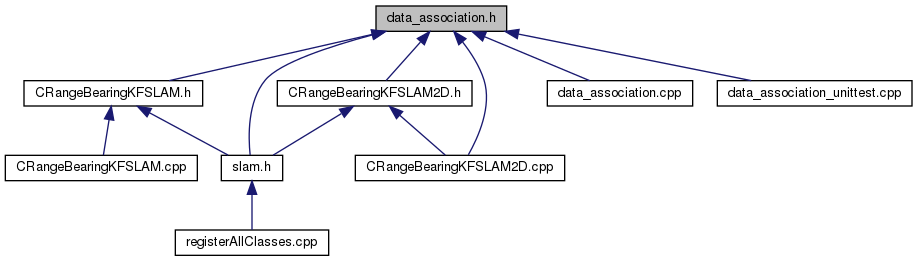
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::slam::TDataAssociationResults |
| The results from mrpt::slam::data_association. More... | |
| struct | mrpt::utils::TEnumTypeFiller< slam::TDataAssociationMethod > |
| struct | mrpt::utils::TEnumTypeFiller< slam::TDataAssociationMetric > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::slam | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Data association | |
| enum | mrpt::slam::TDataAssociationMethod { mrpt::slam::assocNN = 0, mrpt::slam::assocJCBB } |
| Different algorithms for data association, used in mrpt::slam::data_association. More... | |
| enum | mrpt::slam::TDataAssociationMetric { mrpt::slam::metricMaha = 0, mrpt::slam::metricML } |
| Different metrics for data association, used in mrpt::slam::data_association For a comparison of both methods see paper: More... | |
| typedef size_t | mrpt::slam::observation_index_t |
| Used in mrpt::slam::TDataAssociationResults. More... | |
| typedef size_t | mrpt::slam::prediction_index_t |
| Used in mrpt::slam::TDataAssociationResults. More... | |
| void SLAM_IMPEXP | mrpt::slam::data_association_full_covariance (const mrpt::math::CMatrixDouble &Z_observations_mean, const mrpt::math::CMatrixDouble &Y_predictions_mean, const mrpt::math::CMatrixDouble &Y_predictions_cov, TDataAssociationResults &results, const TDataAssociationMethod method=assocJCBB, const TDataAssociationMetric metric=metricMaha, const double chi2quantile=0.99, const bool DAT_ASOC_USE_KDTREE=true, const std::vector< prediction_index_t > &predictions_IDs=std::vector< prediction_index_t >(), const TDataAssociationMetric compatibilityTestMetric=metricMaha, const double log_ML_compat_test_threshold=0.0) |
| Computes the data-association between the prediction of a set of landmarks and their observations, all of them with covariance matrices - Generic version with prediction full cross-covariances. More... | |
| void SLAM_IMPEXP | mrpt::slam::data_association_independent_predictions (const mrpt::math::CMatrixDouble &Z_observations_mean, const mrpt::math::CMatrixDouble &Y_predictions_mean, const mrpt::math::CMatrixDouble &Y_predictions_cov, TDataAssociationResults &results, const TDataAssociationMethod method=assocJCBB, const TDataAssociationMetric metric=metricMaha, const double chi2quantile=0.99, const bool DAT_ASOC_USE_KDTREE=true, const std::vector< prediction_index_t > &predictions_IDs=std::vector< prediction_index_t >(), const TDataAssociationMetric compatibilityTestMetric=metricMaha, const double log_ML_compat_test_threshold=0.0) |
| Computes the data-association between the prediction of a set of landmarks and their observations, all of them with covariance matrices - Generic version with NO prediction cross-covariances. More... | |