#include <mrpt/utils/CSerializable.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/poses/CPosePDF.h>#include <mrpt/poses/CPose3DPDF.h>#include <mrpt/obs/obs_frwds.h>
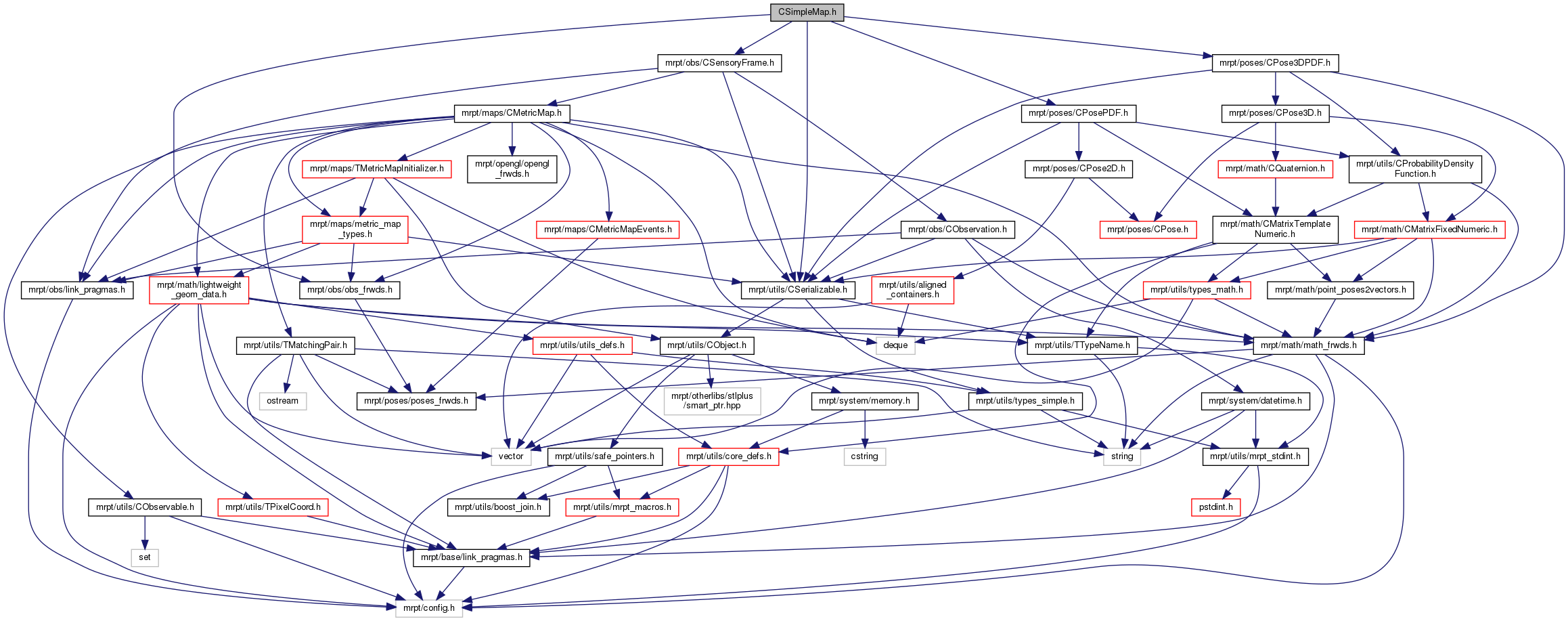
Include dependency graph for maps/CSimpleMap.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CSimpleMap |
| This class stores a sequence of <Probabilistic Pose,SensoryFrame> pairs, thus a "metric map" can be totally determined with this information. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CSimpleMapPtr &pObj) |